Home - SteveJustin1963/Telescope-Tec1 GitHub Wiki
also known as reflecting telescopes or Newtonian telescopes, are a type of optical telescope that uses mirrors to gather and focus light. They have a fascinating history, work on a principle different from refractor telescopes, and are often associated with the Dobsonian mount, which makes them more accessible for amateur astronomers.
History of the Reflector Telescope: The reflector telescope was invented by Sir Isaac Newton in 1668. Newton was trying to address some of the limitations of the refracting telescopes of his time, which used lenses to bend and focus light. These refractors suffered from chromatic aberration, which resulted in colored fringes around objects and reduced image clarity.
Newton's innovation was to replace the lens at the front of the telescope with a curved mirror, known as the primary mirror. This mirror reflected light to a focus point, where a smaller, flat mirror, known as the secondary mirror, redirected the light to an eyepiece or camera. This design eliminated chromatic aberration, offering superior image quality compared to refractors.
How a Reflector Telescope Works: A reflector telescope works on the principle of reflection rather than refraction. Here's a step-by-step explanation of how it functions:
-
Primary Mirror: Light from a distant object enters the telescope and strikes the primary mirror, which is typically a concave, parabolic mirror. This mirror collects and reflects the incoming light toward a focus point.
-
Secondary Mirror: The primary mirror's focus point is where the secondary mirror is placed. The secondary mirror is flat and positioned at an angle to reflect the focused light out of the side of the telescope.
-
Eyepiece or Camera: The focused light then travels to an eyepiece or camera at the side of the telescope tube. The eyepiece magnifies the image formed by the primary and secondary mirrors, allowing the observer to view the object.
-
Adjustable Components: Reflector telescopes often have adjustable components, such as the primary mirror's tilt or the secondary mirror's position, to fine-tune the focus and collimation (alignment of optical elements) for optimal image quality.
The Dobsonian Telescope: The Dobsonian telescope, or "Dob" for short, is not a type of telescope but rather a type of mounting system for reflector telescopes. It was popularized by amateur astronomer John Dobson in the 1960s. The Dobsonian mount is known for its simplicity and stability, making it an excellent choice for amateur astronomers.
When it comes to tracking a star, equatorial mounts are generally better than altazimuth mounts for several reasons:
- Equatorial Mount: Once polar aligned, an equatorial mount can track a star across the sky by moving along one axis (right ascension), which directly corresponds to the rotation of the Earth. This makes tracking very smooth and efficient, especially for long exposures in astrophotography.
- Altazimuth Mount: An altazimuth mount tracks objects by moving in two axes (altitude and azimuth), which does not correspond to the Earth's rotation. As a result, both axes must be constantly adjusted to track a star, which can be more complex and less smooth.
- Equatorial Mount: It eliminates field rotation, a phenomenon where stars appear to rotate around the center of the field of view over time. This makes equatorial mounts ideal for long-exposure astrophotography, where maintaining precise alignment is crucial.
- Altazimuth Mount: Field rotation can be a significant issue with altazimuth mounts during long exposures. Specialized software or hardware like a field derotator is often required to compensate for this.
- Equatorial Mount: Polar alignment might seem complex initially, but once done correctly, it simplifies tracking immensely. Modern mounts often have built-in polar alignment tools that make this process easier.
- Altazimuth Mount: There's no need for polar alignment, which can make setup quicker for casual observation, but this comes at the cost of more complex tracking.
- Equatorial Mount: Generally preferred by serious astronomers and astrophotographers due to its precision and capability for long-term tracking.
- Altazimuth Mount: More user-friendly and often cheaper, making it a good choice for beginners or casual observers, but less suitable for advanced tracking or photography.
In summary, an equatorial mount is better for tracking a star because it allows for more accurate and smoother tracking with minimal adjustments, particularly beneficial for long-exposure astrophotography.
In the context of optical systems like telescopes and cameras, the term "speed" refers to the ability of a lens or mirror to gather light. Specifically, it indicates how quickly a lens or mirror can collect enough light to form a sufficiently exposed image. The F-number, or F-ratio, is crucial in determining this characteristic.
- F/number (Focal Ratio): The F/number is calculated as the ratio of the focal length of the lens or mirror to its aperture diameter. In your case, with a 200mm (8 inches) aperture and a 1000mm (one meter) focal length, the F/number is 5 (F5). This is calculated by dividing the focal length by the aperture diameter (1000mm/200mm = 5).
- Faster Light Gathering: A lower F/number means a larger aperture relative to the focal length. This larger aperture allows more light to enter the system at once, thus "faster" in terms of light gathering. For example, an F5 system is faster than an F10 system because it can gather the same amount of light in less time.
- Brighter Images: Since more light can be gathered quickly, the resulting images can be brighter, which is especially beneficial in low-light conditions such as astronomical observations or indoor photography without flash.
- Shallower Depth of Field: In photography, a lower F/number also results in a shallower depth of field, which means that less of the area in front of and behind the focus point will appear in focus. This effect is used creatively to focus attention on a subject while blurring the background and foreground.
In telescopes, a "fast" mirror (like an F5) is particularly advantageous for deep-sky observing and astrophotography. It allows the observer to capture images of faint celestial objects more quickly than a "slow" mirror (like an F10), as it collects light more efficiently. This is beneficial when observing nebulae, galaxies, and other distant objects that require significant light to detect and photograph effectively.
In summary, the "speed" of an optical system is fundamentally about how efficiently and quickly it can gather light, influenced directly by its F/number. A lower F/number indicates a faster system capable of producing brighter images in shorter amounts of time.
-
Altitude-Azimuth Mount: Dobsonian telescopes use a simple alt-azimuth mount that allows for easy manual tracking of celestial objects. This makes them user-friendly, especially for beginners.
-
Sturdy Base: Dobsonian mounts have a stable and low-profile base, which makes them easy to set up and move around. They are often made from materials like wood or metal.
-
Large Aperture: Many Dobsonian telescopes feature large primary mirrors, providing excellent light-gathering capabilities, which make them suitable for deep-sky observations.
In summary, reflector telescopes have a rich history dating back to Sir Isaac Newton and work by using mirrors to gather and focus light. The Dobsonian mount is a popular choice for amateur astronomers, offering ease of use and affordability, particularly for those interested in deep-sky observations.
of a telescope is a measure of how much an object is enlarged by the telescope. A higher magnification allows you to see more detail in an object, but it also makes the image dimmer and reduces the field of view.
The magnification of a telescope is determined by the focal length of the telescope and the focal length of the eyepiece. It is calculated using the formula:
Magnification = (Telescope focal length) / (Eyepiece focal length)
For example, if you have a telescope with a focal length of 1000mm and an eyepiece with a focal length of 25mm, the magnification would be 40x (1000 / 25 = 40).
To see detail in an object, you will need a magnification that is high enough to resolve the details of the object. The amount of magnification you need will depend on the size and distance of the object, as well as the quality of the telescope and eyepiece. In general, a magnification of 50-100x is sufficient to see detail in most objects, but some objects may require higher magnifications. It is important to note that using too much magnification can actually make the image worse, as the image can become distorted and blurry due to atmospheric conditions and the limitations of the telescope and eyepiece.
is a type of optical aberration that occurs when the image of a point object is not focused to a single point, but instead appears as a line or elongated shape. It is caused by the different curvatures of the lens or mirror in a telescope or camera lens. It is most commonly caused by an asymmetry in the curvature of the lens or mirror, which causes light to be focused differently in different directions. Astigmatism can be corrected by using a special lens called a "corrective lens" which compensates for the asymmetry of the primary lens or mirror. Astigmatism is often present in combination with other types of aberrations, such as spherical aberration and chromatic aberration. It can be corrected with a combination of lenses, mirrors, or other optical elements in a telescope or camera lens. It also can be corrected by using special software during image processing. Astigmatism can be measured by using a special device called a "star test" which consists of shining a point source of light through the lens and observing its shape on a screen or detector.
which use mirrors instead of lenses to gather and focus light. In a reflector telescope, astigmatism is caused by the mirror being deformed or not having a perfect parabolic shape, which can cause the light to be focused differently in different directions. This results in an elongated or distorted image. Astigmatism can also be caused by misalignment of the mirror in the telescope's optical train, which can cause the light to be focused differently in different directions. Astigmatism can be corrected in a reflector telescope by adjusting the mirror cell, which holds the mirror in place, to ensure that the mirror is properly aligned and has the correct shape. It can also be corrected by using a special lens or mirror called a "corrective lens" which compensates for the asymmetry of the primary mirror. Additionally, special software can be used during image processing to correct the astigmatism caused by the imperfect shape of the mirror. It's worth mentioning that Astigmatism is not unique to reflectors, refractor telescopes also can have it, but it occurs less frequently in refractors because the lenses are less likely to deform, and also the lens is less likely to be misaligned in the optical train.
- Star test: This is the most common method for testing astigmatism in a reflector telescope. It involves shining a point source of light, such as a bright star, through the telescope and observing the shape of the image on a screen or detector. If the image is elongated or distorted, it is likely that the telescope has astigmatism.
- Knife-edge test: This test involves placing a thin blade or wire across the telescope's aperture and observing the shape of the shadow it casts. If the shadow is distorted or elongated, it is likely that the telescope has astigmatism.
- Ronchi test: This test involves using a special device called a Ronchi grating, which consists of a series of parallel lines, to observe the image of the telescope's aperture. If the image is distorted or elongated, it is likely that the telescope has astigmatism.
- Foucault test: This test involves shining a point source of light through the telescope and observing the shape of the image on a screen or detector. It is similar to the star test, but it also uses a knife-edge to measure the shape of the shadow that the mirror casts.
It's worth noting that astigmatism testing is best done in the dark, under good seeing conditions, and with a bright star as the target. Also, it is important to keep in mind that astigmatism is not the only aberration that can cause the image to be distorted, so it's best to check for other types of aberrations as well.
https://www.skyatnightmagazine.com/advice/how-to-star-test-a-telescope/
is a component that is placed at the end of a telescope's focuser and is responsible for magnifying the image formed by the telescope's objective lens or primary mirror. The eyepiece works by increasing the apparent size of the image that the objective lens or mirror forms, which makes the image appear closer and larger.
The magnification of an eyepiece is determined by the ratio of the telescope's focal length to the focal length of the eyepiece.
For example,
- an eyepiece with a focal length of 10 mm
- used in a telescope with a focal length of 1000 mm
- would have a magnification of 100x (1000/10).
This means that an object viewed through the telescope would appear
100 times closerthan it would with the naked eye.
Field of View (FOV) is a fundamental concept in optical instruments such as telescopes. It describes the extent of the observable sky or scene at any given instance. Depending on the context, FOV is commonly expressed in degrees, arcminutes, or arcseconds. Several factors influence the FOV, including the telescope's focal length, the size of the eyepiece, and the inherent FOV of the eyepiece itself.
-
A broader FOV translates to a wider sky or scene observation, whereas a narrower FOV offers a detailed, albeit restricted, view.
-
Shorter focal length telescopes, like refractors, generally possess a more extensive FOV. In contrast, longer focal length telescopes, such as reflectors, have a more constricted FOV.
-
The eyepiece plays a significant role in determining FOV. Eyepieces with a more expansive FOV result in broader views, while those with a tighter FOV lead to limited views.
-
For astronomy enthusiasts, FOV indicates the portion of the sky observable at once. For photographers, it dictates the expanse of the scene that can be captured.


Eyepieces are pivotal in establishing FOV and other optical properties. There are multiple eyepiece designs available, such as Plössl, Kellner, and Orthoscopic. Each design has its strengths and weaknesses, especially concerning sharpness, distortion, and FOV.
Some eyepieces come with adjustable eye relief. This refers to the optimal distance between the eyepiece and the viewer's eye to achieve the full FOV. Adjustable eye relief is especially beneficial for those wearing eyeglasses or those who might find it challenging to get close to the eyepiece.
The material from which an eyepiece is made can influence its performance. Generally, eyepieces crafted from high-quality glass deliver superior visual clarity and longevity compared to their plastic counterparts, though they might be pricier.
Observing the vastness of the night sky with a telescope is a breathtaking experience, and one of the factors that significantly impacts what you can see is the True Field of View (TFoV). TFoV tells you the portion of the sky or any distant scene that's visible at a given moment when you look through the telescope using a specific eyepiece. Typically expressed in degrees, a larger TFoV lets you observe a more expansive segment of the sky.
The Apparent Field of View (AFoV) is an intrinsic characteristic of the eyepiece, representing the perceived "width" of the view when peering through just that eyepiece. But to truly discern the section of the sky you'll be observing when combining that eyepiece with a particular telescope, you need to work out the TFoV.
To find TFoV:
[ \text{TFoV (in degrees)} = \frac{\text{AFoV (in degrees)}}{\text{Magnification}} ]
And for magnification, which determines how much larger a celestial object appears compared to its naked-eye observation, you use:
[ \text{Magnification} = \frac{\text{Focal length of the telescope}}{\text{Focal length of the eyepiece}} ]
Let's utilize a reflector telescope with specifications of 200mm aperture and f/5 focal ratio, which translates to a focal length of 1000mm. Pairing this with an eyepiece that has a focal length of 25mm and an AFoV of 50 degrees, we get:
- Calculating the magnification:
[ \text{Magnification} = \frac{1000mm}{25mm} = 40x ]
Objects will appear 40 times larger through this telescope than they would when observed with the naked eye.
- Determining the TFoV:
[ \text{TFoV} = \frac{50 \text{ degrees}}{40} = 1.25 \text{ degrees} ]
So, when you use this eyepiece with your reflector telescope, you'll capture a section of the sky that's 1.25 degrees in width. To put this into perspective, the full moon spans roughly half a degree. This means you'd be gazing upon an area approximately two and a half times wider than the full moon.
In wrapping up, grasping the concept of TFoV is instrumental in setting expectations for what can be seen through a specific telescope and eyepiece combination. It's a key metric for anyone passionate about stargazing, be it a hobbyist or a seasoned astronomer.
(Compact Disc Read-Only Memory) drive has several important characteristics that are designed to optimise the performance of the drive. Some of these characteristics include:
- Numerical Aperture (NA): The numerical aperture of a lens is a measure of its ability to gather light and focus it onto the disc. A higher numerical aperture means that the lens can gather more light and produce a brighter, more focused image of the disc.
- Focal Length: The focal length of a lens is the distance between the lens and the point where the light is focused. A shorter focal length allows the lens to have a wider field of view, while a longer focal length produces a narrower field of view but can magnify the image more.
- Wavefront Distortion: The lens in a CD-ROM drive must be designed to minimize wavefront distortion, which is the deviation of the shape of a wavefront from a perfect spherical shape. Wavefront distortion can cause the light to be focused incorrectly, resulting in a blurry or distorted image of the disc.
- Spherical Aberration: Spherical aberration is an optical effect that occurs when light passing through a lens is not brought to a perfect focus. This effect can cause a loss of sharpness in the image and make it harder for the drive to read the disc correctly.
- Astigmatism: Astigmatism is another optical effect that occurs when the lens is not able to focus all of the light on a single point. This effect can cause distortion of the image, making it harder for the drive to read the disc correctly.
- Chromatic Aberration: Chromatic Aberration is an effect caused by the lens failing to focus all the different colours of light at the same point. This can cause a colour fringe around the object.
These characteristics are essential to the proper function of a CD-ROM drive. A lens with a high numerical aperture, a short focal length, and minimal wavefront distortion, spherical aberration, astigmatism and chromatic aberration will produce a clear, sharp image of the disc that can be read accurately by the drive.
is typically in the range of 6 mm to 15 mm. This is a relatively short focal length which allows the lens to have a wide field of view and to be able to focus on a large area of the disc at once. This is important for a CD-ROM drive because it needs to be able to scan the entire surface of the disc quickly in order to read the data stored on it. The lens in a CD-ROM drive is typically a double-Gauss design which combines two simple lens groups arranged in a negative-positive-negative configuration, this lens design is known to be compact and well suited for wide-angle applications. The numerical aperture of the lens used in a CD-ROM drive is generally around 0.45, this allows it to gather enough light to produce a bright, focused image of the disc. It is important to note that some of the characteristics of the lens such as its focal length and numerical aperture might vary depending on the exact design of the drive, as well as on the production batch, but in general the values stated are within the expected ranges for a CD-ROM drive lens.
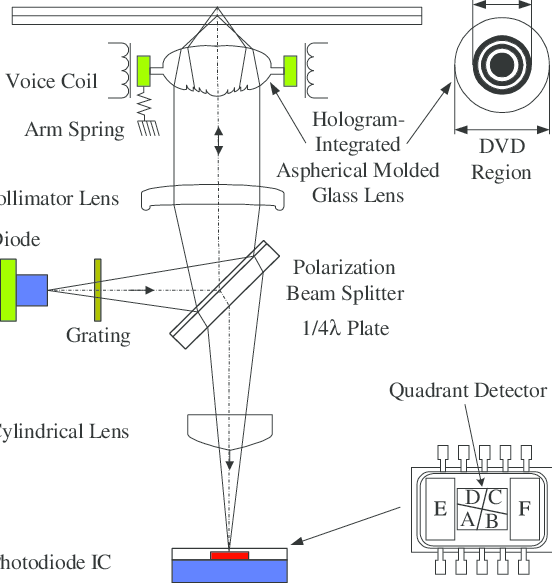
is similar to that of a CD-ROM drive, typically ranging from 6 mm to 15 mm. Like CD-ROM drives, DVD drives need to be able to scan a wide area of the disc quickly in order to read the data stored on it, so a wide field of view is important. However, DVD drives use a different technology to read the disc called multi-beam optics. This technology uses multiple, closely spaced beams to scan the disc, allowing the drive to read multiple data tracks at once. This requires a more complex and expensive lens assembly than what is used in CD-ROM drives. The numerical aperture of the lens used in a DVD drive is typically around 0.6 - 0.7 which is a bit higher than CD-ROM drive. This allows it to gather more light and produce a brighter, more focused image of the disc. This is important because DVD disc have much more data and smaller pits than CD and they have to be read accurately.
It is also important to note that DVD drives use a laser diode to read the disc data, and the wavelength of the laser diode used in DVD drives (655nm) is different from the wavelength of the laser diode used in CD-ROM drives (780nm), and that also affects the design of the lens used in DVD drives.
How to Choose an Eyepiece from https://www.bintel.com.au/how-to-choose-an-eyepiece/
Always remember that your eyepiece is half of your telescope – there’s no point buying a Ferrari and then not putting the wheels on! Choosing an eyepiece can be a daunting task, especially if you’re not familiar with how telescope optics work. We sell a range of high-quality eyepieces, with universal sizes to fit in any telescope, regardless of brand. It’s always worth having a variety of focal lengths to provide you with a range of magnification options for you night sky observing, but working out what to get can be a frustrating exercise, and involves mathematics! Please call our full-time staff in Sydney any time for a discussion if you’re having trouble, or simply have a read of our helpful hints below!
1: Focal length, and some simple maths! All eyepieces have a number associated with them – the focal length. The smaller this number, the higher magnification the eyepiece will provide, and vice-versa. You can work out the exact magnification if you know your telescope focal length (look at the specifications of the model you own). For example, a Celestron Nexstar 4SE has a focal length of 1325mm. With a 10mm eyepiece, this telescope will magnify the target 1325/10 = 132.5x! With a 25mm eyepiece, it will magnify 1325/25 = 53x.
2: Don’t go too high! While you can put any eyepiece in any telescope provided the barrel sizing is correct, you should make sure not to zoom too much. Putting an eyepiece providing 400x magnification into a small refractor will give a blurry and fuzzy image, simply because you are stretching the light too far. As a general rule, you should never magnify more than double the aperture of your telescope in millimeters. For example, the lens diameter of a Celestron Nexstar 4SE is 4 inches (~100mm). You should thus never use an eyepiece in a Nexstar 4SE which powers it over 200x. Similarly, if you own a Cosmos 70 AZ (70mm lens diameter), you should not exceed 140x.
3: Make sure to get the right barrel size! Most eyepieces are associated with either 1.25″ or 2″. This refers to the diameter of the eyepiece slot at the end of your telescope. Almost all beginner telescopes use 1.25″ eyepieces, though some SCT and reflector telescopes (particularly higher end models which are convertible for photography) will fit to both sizes. If in doubt, give us a call! If your scope is over 40 years old it could be other sizes.
4: Don’t forget barlows! Rather than buying six different eyepieces to give you six different powers, one option is to invest in a good Barlow lens. Put simply, a Barlow used in conjunction with an eyepiece will increase the power by a set amount. A 2x Barlow will double the power of any eyepiece (eg: turning a 20mm into a 10mm with higher magnification), while a 3x Barlow will triple the power, etc. This means that you can get six different magnifications with only three different eyepieces – very convenient!
5: Quality is important! Eyepieces vary greatly in price, from simple $49 eyepieces, to $1000 Tele Vue branded eyepieces. Naturally, a standard 10mm eyepiece will not have as high light transmission or clarity as a 10mm Tele Vue eyepiece for triple the price, but to get the most out of expensive eyepieces, you need to be putting them in a good telescope! With high light transmission eyepieces, fainter deep space objects like nebulas and galaxies will suddenly be within reach for many observers who previously were not able to resolve detail on these fascinating targets. You can usually spend up to the cost of your telescope on a matching eyepiece (eg: if your telescope is worth $400, you could buy a $400 eyepiece to put in, which would give excellent results). Exceeding this limit would probably be overkill in most cases – if you’re particularly keen, maybe think about investing in a newer, bigger telescope!
Also (https://www.bintel.com.au/product-category/eyepieces-and-barlows/)
wiki: is a formula to express the maximum resolving power of a microscope or telescope.[1] It is so named after its discoverer, William Rutter Dawes ,[2] although it is also credited to Lord Rayleigh.
The formula takes different forms depending on the units.
R = 4.56/D D in inches, R in arcseconds R = 11.6/D D in centimeters, R in arcseconds where D is the diameter of the main lens (aperture) R is the resolving power of the instrument
When observing the moon, reflected starlight consisting of multiple wavelengths must be taken into account. A convenient way to calculate angular resolution is the Dawes' Limit, named after amateur astronomer W.R. Dawes. The limit is based on the smallest separation at which two point sources can be distinguished from one another, and it depends on the aperture of the telescope. The Dawes' Limit for a telescope with an aperture of D in millimeters is 4.56/D in arcseconds. For example
- a 100mm telescope has a Dawes' Limit of approximately 0.46 arcseconds, meaning the smallest detail that can be resolved is around 0.46 arcseconds in size.
- a 200mm F5 telescope reflector has a Dawes' Limit of approximately 0.023 arcseconds. This is the smallest angular resolution at which two point sources can be distinguished.
refers to astronomical objects that emit strong light in the hydrogen-alpha (H-alpha) spectral line. This line corresponds to the transition of an electron from the third energy level to the second energy level of a hydrogen atom, and is usually observed at a wavelength of 656.3 nanometers in the red part of the visible spectrum.
In astronomy, H-alpha emission is often used as a diagnostic of various physical processes occurring in astronomical objects, such as star formation, ionized gas emission, and activity in galactic nuclei. Hence, objects that are considered "H-alpha rich" are typically those that emit a significant amount of light in this line, and are often the focus of study in fields such as astrophysics and cosmology.
you would need to add a specialized filter that blocks out most of the visible light and only allows the H-alpha light to pass through to the camera's sensor. This type of filter is called an H-alpha filter, and it is specifically designed to enhance the camera's ability to capture images of astronomical objects that emit strong H-alpha light.
There are several ways to add an H-alpha filter to your DSLR camera:
- Clip-in filter: This is a filter that can be easily clipped onto the front of your camera lens. The advantage of this type of filter is that it's quick and easy to install, and you can remove it just as easily when you're done with your observations.
- Internal filter: This type of filter is installed inside the camera body, between the lens and the sensor. The advantage of an internal filter is that it's always in place, so you don't have to worry about installing or removing it.
- Dedicated astro-modified camera: Some camera manufacturers offer specialized astro-modified versions of their cameras that include an internal H-alpha filter. These cameras are specifically designed for astrophotography and offer excellent performance when it comes to capturing images of H-alpha rich targets.
Please note that modifying your camera in any way may void its warranty, and it's important to understand the limitations and potential risks associated with this type of modification before proceeding. Additionally, it's also important to consider other factors, such as the quality of your lens and the stability of your mount, that can affect the quality of your astrophotography.
can also improve its performance with H-alpha rich targets. The IR filter is typically installed in front of the camera's sensor to block out IR light, which can cause unwanted artifacts in images taken with the camera. However, this filter also blocks out some of the light in the H-alpha wavelength range, which can reduce the camera's sensitivity to H-alpha light.
By removing the IR filter, the camera's sensitivity to H-alpha light can be increased, allowing it to capture more detailed images of H-alpha rich targets. This type of modification is often referred to as "astro-modification" or "IR-modification," and it is a popular choice among amateur and professional astrophotographers.
However, it's important to note that removing the IR filter from your camera can also result in increased sensitivity to IR light, which can cause unwanted artifacts in your images, such as color shifts and halos around bright objects. Additionally, this type of modification is not recommended for amateur photographers as it requires a high level of technical skill and knowledge, and can result in permanent damage to the camera if not done correctly.
If you're interested in this type of modification, I would recommend seeking the help of a professional camera technician or a specialized astro-modification service. These professionals have the necessary tools and expertise to safely remove the IR filter and modify your camera for optimal performance with H-alpha rich targets.
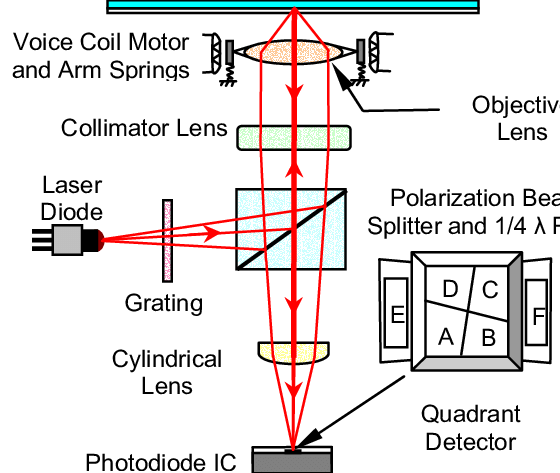
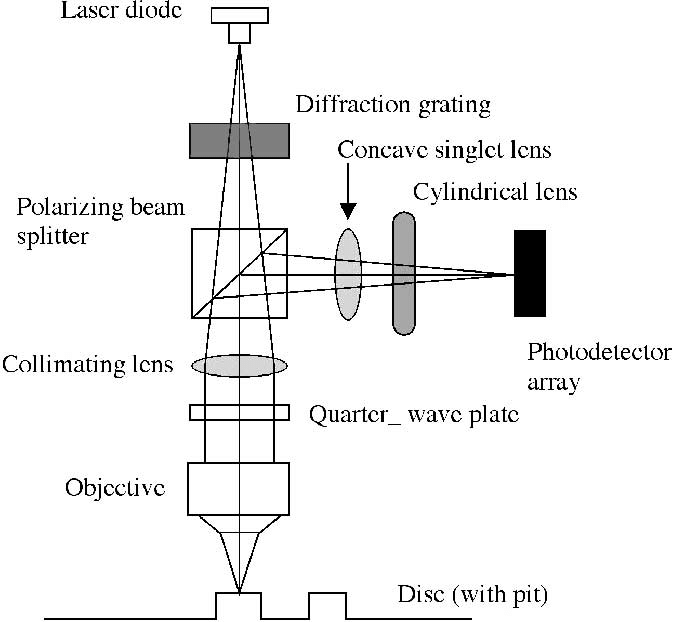
also known as a photodetector array or optical pick-up, is a device used in CD-ROM drives to read the data stored on a compact disc. The array typically consists of a laser diode, a collimator lens, and a photodiode array. The laser diode emits a focused beam of light onto the surface of the disc. The collimator lens is used to ensure that the light beam is parallel and has a consistent width as it travels across the disc. The photodiode array is located behind the collimator lens and is responsible for detecting the reflected light from the disc. The photodiode array is typically made up of several individual photodiodes, each with its own lens and detector. These individual photodiodes are arranged in a line or pattern and work together to detect the light reflected from the disc. As the disc spins, the beam of light scans across the disc, and the photodiode array detects the variations in the reflected light caused by the data stored on the disc. The data is then sent to the drive's electronics, where it is decoded and sent to the computer.
can vary depending on the manufacturer and the type of CD-ROM drive it is used in. Some common specifications include:
- Number of photodiodes: The array typically has several individual photodiodes, with a higher number allowing for a more precise reading of the data on the disc.
- Sensitivity: This is a measure of how well the array can detect light. A higher sensitivity means that the array is able to detect weaker reflections from the disc, which is important for reading data on lower quality discs. Wavelength range: The wavelength range refers to the range of light frequencies that the array can detect. For CD-ROM drives, this is typically in the near infrared range (around 780nm).
- Spectral response: This refers to the range of light frequencies that the array can detect and is typically given as a graph. The size of the array: this depends on the size of the lens used in the CD-ROM drive, some arrays are bigger than others to cover a larger area of the disc.
- Some other specifications that may be provided by the manufacturer include the dark current, noise, and linearity of the array. These specifications can affect the performance of the array and the overall quality of the data read from the disc.
It is possible that a photodiode array used in a CD-ROM drive could be repurposed for photon measurements in astronomy, but it would likely not be the optimal solution. Photodiode arrays used in CD-ROM drives are designed to read data stored on compact discs, which requires a different set of specifications and characteristics than those needed for photon measurements in astronomy.
For example, in astronomy, the measurement should be performed in a low light condition, where a high sensitivity and low noise are important specifications. However, CD-ROM drives are usually optimized for reading data in relatively bright environments. Additionally, the wavelength range and spectral response of a photodiode array used in a CD-ROM drive may not be well-suited for the range of light frequencies typically encountered in astronomical measurements.
In summary, a photodiode array used in a CD-ROM drive would not be an ideal solution for photon measurements in astronomy, but it's not impossible to repurpose it and use it for this specific application with the proper modifications and calibration. it would be advisable to use a dedicated device that is specifically designed for the task of photon measurements.
There are several alternatives to a photodiode array that can be used for astronomical measurements, depending on the specific requirements of the application. Some examples include:
- CCD (charge-coupled device): A CCD is a type of image sensor that can be used to capture images of stars and galaxies. They are widely used in astronomical telescopes and can be sensitive to a wide range of wavelengths, from the ultraviolet to the infrared.
- CMOS (complementary metal-oxide-semiconductor): CMOS sensors are similar to CCDs but they are typically less expensive, they consume less power, and they can operate at higher speeds, which makes them suitable for high-speed imaging and low-light conditions.
- Photomultiplier tubes (PMT): PMTs are used to detect very weak light signals, and are commonly used in low-light-level applications like in spectroscopy, timing measurements, and scintillation counting. They are very sensitive to light and can detect single photons.
- APD (Avalanche Photodiodes): APDs are similar to photodiodes, but they are designed to detect weak light signals by amplifying the electrical current generated by the incoming photons. They are also used for low-light-level applications like spectroscopy, Timing measurements, and scintillation counting.
- ICCD (intensified charge-coupled device): An ICCD is a type of image sensor that uses a device called an intensifier to amplify the weak light signals that are captured by the CCD. This makes them well-suited for low-light-level applications, and for capturing fast-moving objects.
- EMCCD (electron multiplying CCD): An EMCCD is similar to an ICCD, but it uses a different technique to amplify the light signals captured by the CCD. This results in even higher sensitivity and low noise, making them ideal for very low-light-level applications.
- sCMOS (Scientific complementary metal-oxide-semiconductor): A scientific CMOS sensor is a new sensor technology that is designed to provide high resolution, low noise, and high frame rate in a single package, which makes them well suited for scientific applications like Astronomy.
- SPAD (Single Photon Avalanche Diode): SPADs are similar to APDs, but they are designed to detect single photons with a high efficiency, very high sensitivity and low noise, which makes them well suited for applications like Time-of-flight imaging, LIDAR and Spectroscopy.
- PIN photodiode. The Osram BPW34
Each one has its own unique characteristics, capabilities, and limitations, with different advantages and disadvantages, so the choice of sensor depends on the specific requirements of the application, such as the wavelength range and sensitivity needed, the speed of data acquisition, and the budget available.
would likely be the easiest to experiment with and use with a low power computer. CMOS sensors are relatively inexpensive, easy to interface with, and consume less power than CCDs or ICCDs. Additionally, they can operate at high speeds and can be easily integrated into a variety of devices. This makes them well-suited for use in low power, portable or embedded systems. Another reason why CMOS sensors could be the easiest to work with, is because of its low noise and high resolution, which provides a good image quality even at low light levels. The software required to operate the sensor can be relatively simple, and it could be run on a low power computer. The best option would depend on the specific requirements of the application, such as the wavelength range and sensitivity needed, the speed of data acquisition, and the budget.
- S/N ratio: 37 dB
- dynamic range: 69 dB
- sensitivity: 1300 mV/(lux-sec)
- S/N ratio 40dB
- Dynamic Range 50dB
- Sensitivity 0.6V/Lux-sec
The most important feature for astronomy is sensitivity, as this determines how much light the sensor can detect. In this comparison, the OV9726 has a higher sensitivity of 1300 mV/(lux-sec) compared to the OV2640 which has a sensitivity of 0.6V/Lux-sec. Therefore, the OV9726 would be the better choice for star gazing performance.
is a measure of the sensitivity of a digital camera's sensor to light. A higher ISO value usually means the camera can capture more light, resulting in a brighter image. However, increasing the ISO can also cause more noise in the image, and thus can be a tradeoff when taking photos in low-light conditions. In astronomy, CMOS sensors are often used in astrophotography. The increased sensitivity of the sensor to light allows for much longer exposures, which is necessary to capture faint astronomical objects. Increasing the ISO can reduce the amount of time needed to capture a good image, but it can also introduce more noise. So it is important to find the right balance between exposure time and ISO in order to get the best image, and every camera increases noise in a different way. Some slowly ramp it up, others make a big jump after a particular setting.
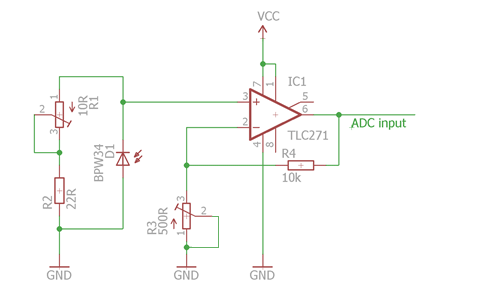
The BPW34 is a type of photodiode that can be used for astronomical experiments. Based on the provided specifications, it has several characteristics that make it suitable for astronomical optical experiments:
- High breakdown voltage (V(BR)): With a minimum breakdown voltage of 60V, the BPW34 can handle high electrical stress, making it suitable for use in high-voltage applications such as astronomical experiments.
- Low reverse dark current: The reverse dark current is the current that flows through the photodiode when it is not exposed to light. With a minimum reverse dark current of 2nA, the BPW34 has a low dark current, which means that it is less likely to produce noise in the images.
- High sensitivity: The BPW34 has a high sensitivity of 0.6V/Lux-sec, which means that it can detect weak light signals, making it suitable for low-light-level applications such as astronomical experiments.
- Wide wavelength range: The BPW34 has a wide wavelength range of 430 to 1100nm, which means that it can detect light across a wide range of frequencies, making it suitable for capturing images of objects that emit light in different wavelength ranges.
- High noise equivalent power: The BPW34 has a low noise equivalent power of 4 x 10^-14 W/√Hz, which means that it is able to detect very weak light signals with a low noise level.
On the other hand, it also has a couple of limitations. One of them is the small range of the angle of half sensitivity of ±65 degrees, which means that this photodiode does not have a wide field of view, limiting its use for capturing images of large areas of the sky. Additionally, it has a relatively high power consumption.
Overall, the BPW34 appears to be a suitable choice for astronomical experiments, as it has a high breakdown voltage, low reverse dark current, high sensitivity, and a wide wavelength range, which allows for capturing images of objects in different wavelength ranges. However, the small range of angle of half sensitivity and high power consumption are important factors that should be considered.
experiment
- Choose a distant star that is known to be variable, such as
- Algol, https://en.wikipedia.org/wiki/Algol
- Mira, https://en.wikipedia.org/wiki/Mira
- Epsilon Aurigae, https://en.wikipedia.org/wiki/Epsilon_Aurigae
- Mount the BPW34 photodiode on a telescope, and aim it at the chosen star.
- Use a filter that limits the light to the wavelength range of 430 to 1100nm, to match the BPW34 sensitivity range.
- Use a data acquisition system to record the electrical current flowing through the photodiode as a function of time.
- Take data for a period of several months, at regular intervals (for example, once a week).
- Analyze the data to determine the variability of the light emitted by the star. Look for patterns in the data that indicate regular changes in brightness, such as periodic variability.
- Compare the results to previous studies of the same star to see if there are any differences in the variability.
- Repeat the experiment using other filters to study the variability of the star's light at different wavelengths.
This experiment allows you to study the variability of the light emitted by a distant star, which can provide insights into the physical processes taking place within the star. Additionally, it allows you to test the ability of the BPW34 photodiode to detect weak light signals over a wide wavelength range and compare the results with other studies.
experiment
- Choose a double star system that is known to be variable, such as
- Mount the BPW34 photodiode on a telescope, and aim it at the chosen double star system.
- Use a filter that limits the light to the wavelength range of 430 to 1100nm, to match the BPW34 sensitivity range.
- Use a data acquisition system to record the electrical current flowing through the photodiode as a function of time.
- Take data for a period of several months, at regular intervals (for example, once a week).
- Analyze the data to determine the variability of the light emitted by the double star system. Look for patterns in the data that indicate regular changes in brightness, such as periodic variability.
- Compare the data for each star individually, in order to understand the contribution of each star to the variability.
- Repeat the experiment using different filters to study the variability of the double star system at different wavelengths.
- Compare the results of this experiment with previous studies of the same double star system.
This experiment allows you to study the variability of light emitted by a double star system to gain insight into the physical processes taking place within the stars, while testing the ability of the BPW34 photodiode to detect weak light signals over a wide wavelength range and comparing the results with other studies, instruments such as CCD camera, and even with the naked eye to get a better understanding of the performance of the sensor and the influence of the other factors in the final results.
There are a few different ways to make the code more accurate to say 0.1 degrees, depending on the specifics of the application and the data that the code is working with. Here are a few options:
- Increase the resolution of the lookup table: The code uses a lookup table to map ADC values to angle. One way to increase the accuracy of the code is to increase the resolution of the lookup table by adding more entries. This will allow the code to more accurately interpolate between values in the table.
- Use a more accurate interpolation method: The code uses linear interpolation to estimate the angle from the ADC value. Using a more accurate interpolation method such as a polynomial or spline interpolation can improve the accuracy of the code.
- Use more decimal places: The code currently uses a single decimal place for the final temperature reading. Using more decimal places in the final temperature reading will increase the accuracy of the code.
- Use a cct with higher accuracy: The accuracy of the final angle reading is limited by the accuracy of the sensor. Using a more sensitive angle pulse cct with higher accuracy will improve the overall accuracy of the code.
This code uses the same basic structure as the previous example, but with different values in the lookup table and a different variable name. Here, the ADC values are used to interpolate an angle between 0 and 18, with a resolution of 0.1 degrees. Please note that, the angle_lookup table values should be replaced with actual data. interpol_1.c
float interpolate_angle(int adc_val)
{
// Lookup table with higher resolution
int Lookup[19] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18};
// Angle values corresponding to the above ADC values
float angle_lookup[19] = {0.0, 1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0, 10.0, 11.0, 12.0, 13.0, 14.0, 15.0, 16.0, 17.0, 18.0};
for (int i = 18; i > 0 ; i--)
{
if (Lookup[i - 1] > adc_val)
{
// Using linear interpolation
float angle = angle_lookup[i-1] - (((float)(adc_val - Lookup[i-1]) / (float)(Lookup[i-1] - Lookup[i])) * (angle_lookup[i-1]-angle_lookup[i]));
//Rounding off to 0.1 degree
angle = round(angle * 10) / 10;
return angle;
}
}
}
Here's an example of how the code could be modified to interpolate an angle between 80 and 130 degrees, using a pair of 8-bit integers to store the result and the lookup table. In this example, I changed the range of the angle from 0-18 to 80-130, the lookup tables are also updated to the new range, and I used a pair of 8-bit unsigned integers to store the result and the lookup table. The resolution of the interpolation remains the same, 0.1 degree.
Keep in mind that as you're using 8-bit integers, you will be limited by the range of the integers(0-255) which you are using. If the value of angle exceeds 130 then the function will return the maximum value i.e. 255. interpol_2.c
#include <stdint.h>
uint8_t interpolate_angle(uint8_t adc_val)
{
// Lookup table with higher resolution
uint8_t lookup_adc[51] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50};
// Angle values corresponding to the above ADC values
uint8_t lookup_angle[51] = {80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99, 100, 101, 102, 103, 104, 105, 106, 107, 108, 109, 110, 111, 112, 113, 114, 115, 116, 117, 118, 119, 120, 121, 122, 123, 124, 125, 126, 127, 128, 129, 130};
for (int i = 50; i > 0; i--)
{
if (lookup_adc[i - 1] > adc_val)
{
// Using linear interpolation
uint8_t angle = lookup_angle[i - 1] - (((float)(adc_val - lookup_adc[i - 1]) / (float)(lookup_adc[i - 1] - lookup_adc[i])) * (lookup_angle[i - 1] - lookup_angle[i]));
return angle;
}
}
}
is a method of estimating the value of a function at a certain point, given a set of data points that the function passes through. The basic idea behind polynomial interpolation is to fit a polynomial function of degree n (where n is the number of data points) through the n data points, such that the polynomial function passes through all of the data points. The polynomial function can then be used to estimate the value of the function at any point within the range of the data points. For example, if we have a set of data points (x0, y0), (x1, y1), ..., (xn, yn), we can fit a polynomial function of degree n through these data points. The polynomial function can be represented by the equation:
p(x) = a0 + a1*x + a2*x^2 + ... + an*x^n
where a0, a1, ..., an are the coefficients of the polynomial that need to be determined.
There are different methods to find the coefficients of polynomial like
- Newton's Divided Differences : Here you'll use the concept of recursive formula to find the polynomial coefficients.
- Least Squares : Here you will try to minimize the difference between the function f(x) and the polynomial function p(x) by minimizing the sum of the square of the differences between them.
Once the coefficients are found, the polynomial function can be used to estimate the value of the function at any point within the range of the data points. One of the advantage of polynomial interpolation is that the polynomial function can be used to estimate the value of the function at any point, even outside the range of the data points, although the accuracy of the estimation will be reduced outside the range. One of the major disadvantage of polynomial interpolation is Runge's phenomenon. Where a polynomial that is a good fit to a set of data at the center of the data will produce large oscillations (Runge's phenomenon) near the boundaries. It is generally more pronounced when the degree of the polynomial is high. Thus polynomial interpolation is a powerful method for estimating the value of a function at a certain point, given a set of data points. It can be applied to both equally and unequally spaced data points and can give accurate results if the function is well represented by a polynomial of low degree. However, it can be sensitive to the distribution of the data points and can produce large oscillations near the boundaries.
To code this, use the Newton's Divided Differences method for polynomial interpolation. The function takes an ADC value as input, then it uses the x and y arrays to store the data points. The arrays are passed to the function, which uses them to compute the polynomial coefficients and estimate the angle at the input ADC value. It loops through the arrays, the outer loop is used to calculate the divided difference of the data points and the inner loop is used to calculate the interpolated value. Still you'll need to replace the x and y arrays with your own data points and also make sure that your polynomial degree doesn't exceed the amount of data points you have. As the data points are known and fixed it is also called as a Lagrange Interpolation.
interpol_poly_new_1.c
#include <cmath>
float interpolate_angle(float adc_val)
{
// Data points
float x[] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18};
float y[] = {80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98};
int n = sizeof(x) / sizeof(x[0]);
float a[n];
for (int i = 0; i < n; i++)
a[i] = y[i];
for (int j = 1; j < n; j++)
for (int i = 0; i < n - j; i++)
a[i] = (a[i + 1] - a[i]) / (x[i + j] - x[i]);
float result = a[0];
float term = 1;
for (int i = 0; i < n - 1; i++) {
term = term * (adc_val - x[i]);
result = result + a[i + 1] * term;
}
return result;
}
is a method for estimating the value of a function at a certain point, given a set of data points that the function passes through. The basic idea behind spline interpolation is to fit a smooth piecewise polynomial function through the data points, such that the polynomial function is continuous, and its first and second derivatives are also continuous at the points where the polynomials are joined together.
In contrast to polynomial interpolation, where a single polynomial function is fit through all the data points, spline interpolation uses multiple polynomial functions, each fitting a subset of the data points. The polynomials are joined together at the data points, creating a smooth curve that passes through all the data points.
There are several types of spline interpolation, such as:
- Linear spline interpolation : In this method, a straight line is used to interpolate between each pair of data points. It is simple to use but the interpolated function does not have any smoothness property.
- Quadratic spline interpolation: Here, Quadratic polynomials are used to interpolate between data points. The interpolated function has a continuous first derivative, but not a continuous second derivative.
- Cubic spline interpolation: Cubic polynomials are used to interpolate between the data points. The interpolated function has a continuous first and second derivative, providing a smooth curve that passes through all the data points.
- Natural spline : In this type of spline, the second derivative of the polynomial function is set to zero at the endpoints. It tends to provide a more smooth curve compared to the cubic spline.
- Cubic spline interpolation is the most widely used method. It is widely used in computer graphics, numerical analysis, and other fields where a smooth interpolation is desired. One of the major advantage of spline interpolation is that it provides a smooth curve that passes through all the data points, so it preserves the local features of the data.
Spline interpolation has one major disadvantage, which is that it requires more computation to find the polynomial functions than polynomial interpolation, especially when the number of data points is large. Thus, spline interpolation is a powerful method for estimating the value of a function at a certain point, given a set of data points. It provides a smooth curve that passes through all the data points, preserving the local features of the data. However, it requires more computation than polynomial interpolation, especially when the number of data points is large.
To code the natural cubic spline interpolation method. The function takes an ADC value as input and uses it to estimate the angle. It utilizes x and y arrays to store the data points. It first finds the differences between consecutive data points and then the slopes of the tangents at the data points using this difference and the y values. Then it uses these values to calculate the second derivative at the data points using the tridiagonal matrix algorithm. Finally, it uses this second derivative to interpolate the angle at the input ADC value. And you'll need to replace the x and y arrays with your own data points to use it. Also, note that the spline interpolation techniques like this are relatively more complex and computationally expensive as compared to polynomial interpolation or linear interpolation methods.
interpol_nat_cubic_spline_1.c
#include <algorithm>
#include <vector>
#include <cmath>
using namespace std;
float interpolate_angle(float adc_val)
{
// Data points
vector<float> x = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18};
vector<float> y = {80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98};
int n = x.size();
vector<float> h, b, d, alpha, c(n), l(n), u(n), z(n);
h.resize(n);
b.resize(n);
d.resize(n);
alpha.resize(n);
for (int i = 0; i < n - 1; i++)
h[i] = x[i + 1] - x[i];
for (int i = 1; i < n - 1; i++)
alpha[i] = 3 * (y[i + 1] - y[i]) / h[i] - 3 * (y[i] - y[i - 1]) / h[i - 1];
l[0] = 1;
u[0] = 0;
z[0] = 0;
for (int i = 1; i < n - 1; i++) {
l[i] = 2 * (x[i + 1] - x[i - 1]) - h[i - 1] * u[i - 1];
u[i] = h[i] / l[i];
z[i] = (alpha[i] - h[i - 1] * z[i - 1]) / l[i];
}
l[n - 1] = 1;
c[n - 1] = 0;
for (int i = n - 2; i >= 0; i--) {
c[i] = z[i] - u[i] * c[i + 1];
b[i] = (y[i + 1] - y[i]) / h[i] - h[i] * (c[i + 1] + 2 * c[i]) / 3;
d[i] = (c[i + 1] - c[i]) / (3 * h[i]);
}
int k = 0;
for (int i = 0; i < n - 1; i++) {
if (adc_val >= x[i] && adc_val <= x[i + 1]) {
k = i;
break;
}
}
float result = y[k] + (adc_val - x[k]) * b[k] + (adc_val - x[k]) * (adc_val - x[k]) * c[k] + (adc_val - x[k]) * (adc_val - x[k]) * (adc_val - x[k]) * d[k];
return result;
}
An arcsecond is a unit of angular measurement that is equal to 1/60 of an arcminute and 1/3600 of a degree. In other words, there are 3600 arcseconds in one degree.
Arcseconds are commonly used in astronomy to express small angles or angular separations. For example, the angular diameter of the Moon as seen from the Earth is approximately 0.5 degrees, or 30 arcminutes, or 1800 arcseconds. The resolution of a telescope or other optical instrument is often expressed in arcseconds, with higher numbers indicating better resolution.
One way to think about arcseconds is as a measure of the angle subtended by a small object or feature at a given distance. For example, if you are viewing a distant object through a telescope, the size of the object in arcseconds will depend on its distance from the telescope and the size of the telescope's objective lens or mirror.
To count 1 arcsecond accuracy with a +/- 0.5 arcsecond error, you will need to use a gear ratio that produces a sufficient number of pulses per arcsecond. The required gear ratio will depend on the number of pulses per revolution produced by the encoder and the desired accuracy of the measurement.
To calculate the required gear ratio, you can use the following formula:
gear ratio = (pulses per arcsecond) / (pulses per revolution / 360 degrees)
For example, if the encoder produces 600 pulses per revolution and you want to achieve 1 arcsecond accuracy with a +/- 0.5 arcsecond error, you will need a gear ratio of at least:
gear ratio = (3600 pulses/arcsecond) / (600 pulses/revolution / 360 degrees) = 6
This means that you will need to down gear the encoder by a factor of at least 6:1 in order to achieve the desired accuracy.
Keep in mind that this is a minimum requirement, and you may need to use a higher gear ratio or implement additional measures (such as calibration or error correction) in order to achieve the desired accuracy in your specific application.
The angular diameter of the Sun as seen from the Earth is approximately 0.53 degrees, or 31.8 arcminutes, or 1911 arcseconds. This means that if you were to view the Sun through a telescope from the Earth, it would appear to be 1911 arcseconds in size.
Keep in mind that the angular diameter of the Sun can vary slightly due to the elliptical shape of the Earth's orbit around the Sun. At its closest approach to the Earth (called perihelion), the Sun's angular diameter is slightly larger than at its farthest point (called aphelion). However, the difference in angular diameter is relatively small and is not noticeable to the naked eye.
It is important to use caution when observing the Sun, as looking directly at the Sun can cause serious eye damage. It is recommended to use special solar filters or indirect viewing methods when observing the Sun.
The angular diameter of Mars as seen from the Earth can vary significantly due to the elliptical shape of Mars' orbit around the Sun. At its closest approach to the Earth (called perihelion), Mars' angular diameter can be as large as 25.1 arcseconds. At its farthest point (called aphelion), Mars' angular diameter can be as small as 3.5 arcseconds.
The average angular diameter of Mars as seen from the Earth is approximately 15 arcseconds. However, this value can vary depending on the specific location of Mars in its orbit and the position of the Earth relative to Mars.
It is important to note that the angular diameter of Mars as seen from the Earth is much smaller than the angular diameter of the Sun. This means that Mars appears much smaller in the sky and is more difficult to observe than the Sun. The best time to observe Mars is when it is at its closest approach to the Earth, which occurs approximately once every two years. At this time, Mars will appear larger and brighter in the sky and will be easier to see with a telescope or other optical instrument.
The speed of Earth's rotation, or the angular velocity of the Earth, is approximately 0.00417 degrees per second. This is equivalent to approximately 15 arcseconds per second. The Earth's rotational speed is not constant, and can vary slightly due to a number of factors such as the gravitational pull of the Moon and the Sun, the distribution of mass within the Earth, and the Earth's axial tilt. However, the overall rotational speed of the Earth is relatively constant over time, and the variations are small enough that they are not noticeable to most people. The Earth's rotational speed determines the length of a day, which is defined as the time it takes for the Earth to make one complete rotation on its axis. The length of a day is approximately 24 hours, or 86400 seconds. This means that the Earth's rotational speed is approximately 15 arcseconds per second, or 86400 seconds per day.
is the smallest size of an object that can be resolved by a telescope or other imaging system. It is determined by the wavelength of light being used and the diameter of the telescope's aperture. The formula for the Rayleigh limit is:
θ = 1.22 * λ / D where θ is the angular resolution, λ is the wavelength of light, and D is the diameter of the telescope's aperture.
The smaller the value of θ, the greater the resolving power of the telescope. However, the Rayleigh limit is often not the limiting factor in determining a telescope's resolution, as other factors such as atmospheric turbulence and the quality of the optics can also come into play.
For example : The angular resolution (θ) for a telescope with an aperture of 200mm and an f-ratio of f/5 can be calculated using the Rayleigh limit formula:
θ = 1.22 * λ / D where λ is the wavelength of light, and D is the diameter of the telescope's aperture.
For visible light with a wavelength of 550 nanometers:
θ = 1.22 * 550 * 10^-9 m / (200 * 10^-3 m)
θ = 2.2 * 10^-6 radians
So the angular resolution of the telescope is 2.2 * 10^-6 radians. This is the smallest angle at which two point sources can be distinguished as separate in the telescope.
Please note that this is a theoretical resolution, real-world resolution is limited by factors such as atmospheric turbulence and the quality of the optics, which can lower the resolution.
you can use the following conversion factor:
1 radian = (180/π) * 3600 arc seconds So,
2.2 * 10^-6 radians = (2.2 * 10^-6) * (180/π) * 3600 arc seconds = 0.39 arc seconds.
So the angular resolution of the telescope with an aperture of 200mm and an f-ratio of f/5 is 0.39 arc seconds. This means that two point sources can be distinguished as separate if they are separated by an angle of 0.39 arc seconds or greater in the telescope.
is a star system located about 4.37 light-years from Earth, so it is not visible to the naked eye. However, if you were able to see Alpha Centauri through a telescope, the angular size of the system would depend on the distance between the Earth and Alpha Centauri, as well as the size of the telescope's field of view. Alpha Centauri A is a star located in the Alpha Centauri star system, which is about 4.37 light-years from Earth. If you were using a telescope with a field of view of 2.46 arcseconds and the distance between the Earth and Alpha Centauri A was 4.37 light-years, the size of Alpha Centauri A in the eyepiece would be approximately 0.003 inches.
To calculate this, you would use the formula:
Size in eyepiece (in inches) = (Angular size of object in arcseconds) / (Field of view in arcseconds)
Plugging in the values for Alpha Centauri A and the eyepiece field of view, you get:
(0.007 arcseconds) / (2.46 arcseconds) = 0.003 inches = 0.0762 millimeters
Keep in mind that this is just an estimate, and the actual size of Alpha Centauri A in the eyepiece may vary depending on the specifics of the telescope and eyepiece.
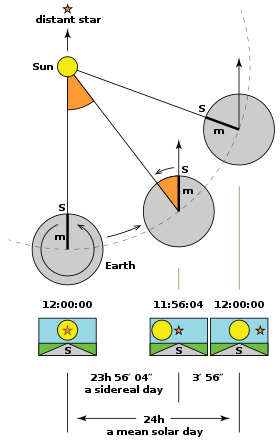
- Sidereal time is based on when the vernal equinox passes the upper meridian. This takes approximately 4 minutes less than a solar day. Sidereal time is useful to astronomers because any object crosses the upper meridian when the local sidereal time is equal to the object's right ascension. (https://lco.global/spacebook/sky/sidereal-time/)
- Because Earth orbits the Sun once a year, the sidereal time at any given place and time will gain about four minutes against local civil time, every 24 hours (https://en.wikipedia.org/wiki/Sidereal_time)
From (https://squarewidget.com/astronomical-calculations-sidereal-time/)
- Gathering necessary data: The website collects user input such as the date, time, and location coordinates (latitude and longitude).
- Calculating Julian date: The website calculates the Julian date based on the inputted date and time.
- Calculating Julian centuries: The website calculates the Julian centuries from the J2000 epoch, which is 2000 January 1 12:00:00 TT.
- Calculating mean sidereal time: The website calculates the mean sidereal time for the given Julian centuries using the formula: 280.46061837 + 360.98564736629 * T + 0.000387933 * T^2 - T^3 / 38710000, where T is the Julian centuries.
- Adjusting mean sidereal time for longitude: The website adjusts the mean sidereal time based on the inputted longitude, since sidereal time varies with longitude.
- Converting mean sidereal time to sidereal time: The website converts the mean sidereal time to apparent sidereal time by adding the equation of the equinoxes.
- Displaying sidereal time: The website displays the resulting sidereal time to the user.
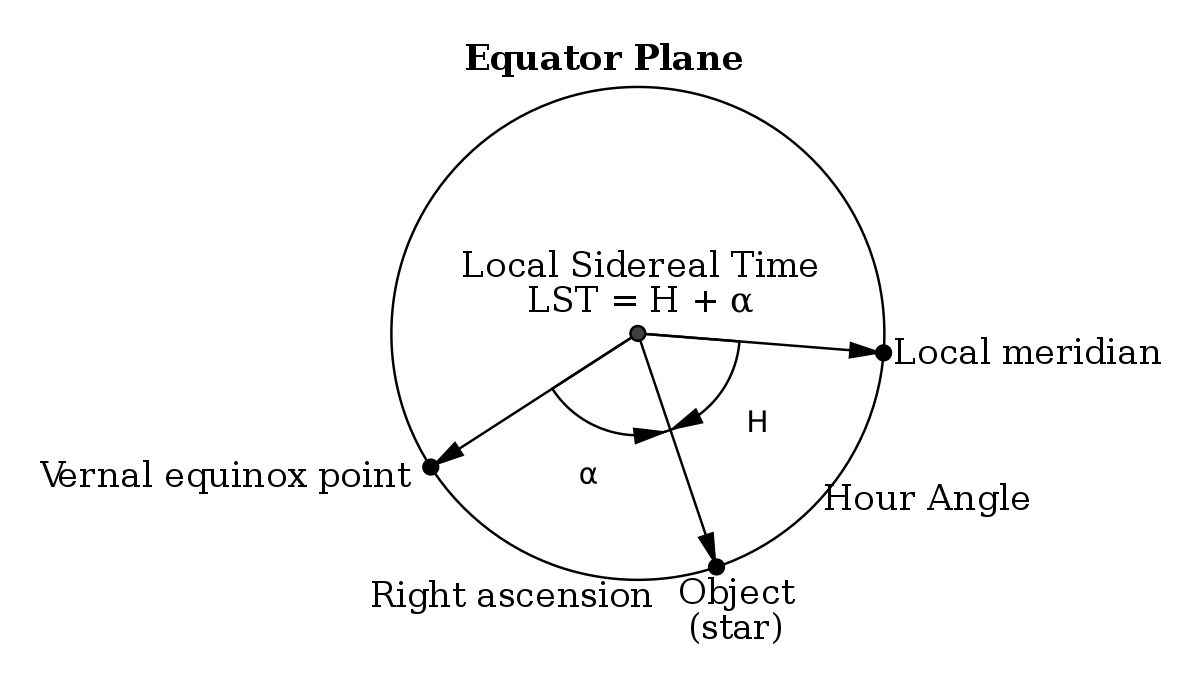
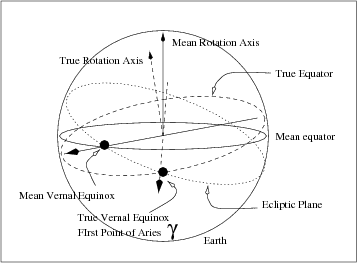
(LST) is the measure of the apparent motion of the stars in the sky as observed from a particular location on the Earth's surface. It is defined as the hour angle of the vernal equinox, which is the point in the sky where the ecliptic (the apparent path of the Sun) intersects with the celestial equator (the projection of the Earth's equator onto the sky).
LST is used in astronomy and navigation to determine the position of celestial objects in the sky at a particular time and location. It is typically expressed in hours, minutes, and seconds, and is measured from 0 to 24 hours, with 0 hours corresponding to the moment when the vernal equinox crosses the local meridian (the imaginary line passing through the zenith and the north and south poles) and 24 hours corresponding to the next crossing.
To calculate LST for a particular location, you need to know the longitude of the observer's position, as well as the date and time of the observation. A number of online calculators and software programs are available to perform this calculation automatically, using the observer's location and the current time as inputs.

It has fantastic complex detail, but the brightness hurts the eye, put camera body try photograph, focal plane lower than camera, another project When viewing or photographing the moon using a telescope, there are specific considerations and setups that help maximize the experience and outcome, especially when using this f/5 reflector telescope. Here's a technical brief on how to look at the moon with such a setup:
- f/5 Reflector Telescope: as its a f/5 reflector, this is a shorter focal length than others, making it more compact and portable. This configuration offers a wider field of view compared to higher focal ratio telescopes.
- Mount: A stable mount is needed, the dobson friction mount is easy to move but hard to slwe and it also shakes and vibrates between steetling, but a an equatorial or a robust alt-azimuth, is crucial to keep the telescope steady during viewing and photography.
- Eyepieces: For visual observations, eyepieces ranging from 10mm to 25mm provide a range of magnifications that are useful for lunar observations.
- Barlow Lens: Optional but useful, a Barlow lens can double or triple the effective magnification of an eyepiece. but it also move the focal plane out from the eyepiece removed for the camera to take shots. with out it u cannot get the camera to focus
- Camera: For those interested in astrophotography, a DSLR or a dedicated astronomy camera can be used.
- Moon Filter: To reduce the brightness of the moon and increase contrast, a moon filter can be very helpful. when u loook without the filter u feel blinded inone eye and feeling makes u ill. so use a filter
- Alignment: Begin by aligning your telescope with the moon. This can be straightforward as the moon is a bright, easy-to-find target. and yes it moves fast, a few minutes and its gone
- Focusing: Use a low magnification eyepiece first to center and focus the moon in your view. Once centered, you can switch to a higher magnification eyepiece or camera setup.
- Tracking: If using an equatorial mount, properly align it to the celestial pole (Polaris in the Northern Hemisphere) to facilitate smooth tracking of the moon as it moves across the sky. will need the tec1 with motor control for this
- Visual Observation: Start with the lowest magnification to enjoy a wide view of the moon. Gradually increase the magnification to examine features such as craters, maria, and rilles in more detail.
- Photography: Attach your camera to the telescope using an appropriate adapter. For DSLRs, use the prime focus method where the camera is attached directly to the telescope, replacing the eyepiece. The focus can be tricky to perfect and might require frequent adjustments as you shoot.
- Exposure Settings: The moon is very bright, so start with a fast shutter speed; 1/250 to 1/500 second at ISO 100 is a good baseline. Adjust aperture and ISO accordingly based on the brightness of the moon and desired depth of field.
- Focus: Autofocus may struggle with the stark contrast of the moon’s surface. Manual focus is recommended, using live view mode for finer adjustments.
- Image Stability: Use a remote shutter release or the camera's built-in timer to minimize vibrations when taking pictures.
- Overexposure: The moon's surface can be very bright, making it easy to overexpose details. Experiment with different settings and possibly use HDR techniques to balance the exposure.
- Atmospheric Conditions: Turbulence in the Earth’s atmosphere can blur details. Viewing during stable atmospheric conditions, or using adaptive optics if available, can improve image quality.
- Stacking: For astrophotography, taking multiple exposures and using software to stack and align them can significantly enhance the detail and reduce noise.
- Filters: Experiment with different filters to enhance certain lunar surface features, like polarizing filters to manage brightness and contrast.
By following these guidelines and continuously experimenting with different settings, enthusiasts can greatly enhance their lunar viewing and photography experiences using an f/5 reflector telescope.
First, let's define a few terms:
-
Angular Resolution (θ): Angular resolution is the minimum separation between two point sources of light at which they can still be distinguished as separate entities. It is usually measured in radians.
-
Focal Length (f): The focal length of an optical system, like a telescope, is the distance between the lens or mirror and the focal point where the image is formed. It's measured in millimeters or meters.
-
Aperture Diameter (D): The aperture diameter is the size of the objective lens or primary mirror in the optical system. It's typically measured in millimeters or meters.
The Rayleigh Criterion is a commonly used formula to determine the angular resolution (θ) of an optical system:
θ = 1.22 * (λ / D)
Where:
- θ is the angular resolution in radians.
- λ (lambda) is the wavelength of light being observed (usually in nanometers).
- D is the aperture diameter of the optical system.
Now, let's consider an eyepiece with a particular focal length (f_ep) and the telescope's focal length (f_tel). The magnification (M) of the eyepiece is calculated as:
M = f_tel / f_ep
When you observe through an eyepiece, you are effectively increasing the focal length of the telescope. Thus, the angular resolution when using the eyepiece (θ_ep) is given by:
θ_ep = θ_unaided / M
Where:
- θ_ep is the angular resolution with the eyepiece.
- θ_unaided is the angular resolution of the telescope without the eyepiece.
- M is the magnification of the eyepiece.
Now, let's consider the concept of poor sharpness on-axis. When an eyepiece exhibits this characteristic, it means that even though the telescope itself might provide good on-axis sharpness, the eyepiece introduces additional aberrations or errors. These aberrations can affect the overall angular resolution and image quality.
To diagnose poor sharpness on-axis, you would typically compare the observed angular resolution through two identical eyepieces. If one consistently provides a worse on-axis image than the other, it suggests that the eyepiece itself is introducing aberrations or errors that reduce the sharpness.
The exact mathematics to quantify these aberrations would depend on the specific optical design and aberrations present in the eyepiece. Various aberrations like spherical aberration, chromatic aberration, and coma can contribute to poor on-axis sharpness, and their mathematical descriptions can be complex.
In practice, assessing poor sharpness on-axis often involves visual inspection and comparison rather than precise mathematical calculations. Advanced optical testing equipment and techniques may be required for a more detailed analysis of eyepiece performance.
including lateral and fringe chromatic aberrations
-
Chromatic Aberration: Chromatic aberration is the phenomenon where different colors of light are focused at different points, causing a color fringe around the image. It occurs due to the dispersion of light, where different wavelengths of light bend by different amounts when passing through a lens or prism. The mathematical formula for chromatic aberration can be expressed as:
C = V (nF - nC)
Where:
- C is the chromatic aberration.
- V is the Abbe number of the glass used in the lens.
- nF is the refractive index of the glass for the Fraunhofer F-line (blue).
- nC is the refractive index of the glass for the Fraunhofer C-line (red).
-
Lateral Chromatic Aberration: Lateral chromatic aberration occurs when different colors of light are displaced laterally (sideways) from each other, causing color fringing at the edges of the field of view. This can be mathematically expressed as a lateral displacement in the image plane due to the dispersion of light.
Lateral Displacement (D) = C * f * Δλ
Where:
- D is the lateral displacement.
- C is the chromatic aberration (as calculated above).
- f is the focal length of the lens.
- Δλ is the difference in wavelength between the colors causing the aberration.
-
Fringe Chromatic Aberration: Fringe chromatic aberration is a specific type of lateral chromatic aberration that results in color fringes around high-contrast objects. It is caused by the variation in the refractive index of the lens material with different wavelengths of light. The mathematical expression for fringe chromatic aberration can be complex and involves the lens design and material properties.
In eyepieces, efforts are made to minimize chromatic aberration through the use of high-quality glass materials, multi-coatings, and advanced lens designs. However, completely eliminating chromatic aberration, especially at the edge of the field of view, can be challenging and may result in higher costs.
The presence of a tiny ring of aberrant color at the edge of the field of view is a common occurrence in eyepieces and can be due to a combination of factors, including the angle of vision, lens coatings, and the design of the eyepiece. This effect can vary among eyepieces and is often more pronounced in wide-field eyepieces.
and its interaction with telescopes
-
Field Curvature: Field curvature is a common optical aberration that results in the field of view of an optical system being curved rather than flat. This curvature can be either positive or negative, meaning that the field of view can bulge outward or inward from the center of the image. Field curvature occurs due to the geometry of the optical elements in the system, especially the curvature of lenses.
-
Positive Field Curvature: In this case, the field of view curves outward, away from the center of the image. It can be mathematically represented as a positive radius of curvature (Rc). The equation for a curved field can be expressed as:
r^2 = x^2 + y^2 + Rc^2
Where:
- r is the distance from the optical axis.
- x and y are the coordinates on the image plane.
- Rc is the radius of curvature.
-
Negative Field Curvature: In this case, the field of view curves inward toward the center of the image. It can be represented with a negative radius of curvature. The equation remains the same as above, but with a negative value for Rc.
-
-
Scope Interaction: Field curvature in eyepieces can interact with the field curvature of the telescope, which may be positive or negative, depending on the telescope design. When the field curvature of the eyepiece and telescope have opposite signs, they can partially cancel each other out, resulting in a flatter overall field of view.
-
Positive Scope Field Curvature with Negative Eyepiece Field Curvature: This combination can lead to a flatter field compared to the individual field curvatures. The curvature from the eyepiece counteracts the curvature from the telescope, resulting in a more planar image.
-
Negative Scope Field Curvature with Positive Eyepiece Field Curvature: Similarly, when the telescope has negative field curvature and the eyepiece has positive field curvature, they can combine to yield a flatter field of view.
-
-
Compensation with Focusing: If there is a noticeable field curvature that cannot be completely corrected, observers can sometimes achieve a more uniform focus across the field of view by focusing on an object halfway between the center and the edge of the field. This accommodates both the defocused center and edge, resulting in an improved overall view.
-
Age-Related Effects: As people age, their ability to accommodate their eyes to correct for field curvature diminishes. This means that older observers may find field curvature more problematic, as they cannot easily adjust their focus to compensate for it.
In summary, field curvature in eyepieces and telescopes can be mathematically described, and its interaction can either enhance or mitigate the curvature depending on the signs of the curvatures involved. Observers may need to adjust their focus or choose eyepieces carefully to optimize their viewing experience, especially as they age and accommodation becomes more challenging.
also known as pincushion or barrel distortion, is an optical aberration that causes a change in magnification across the field of view. It can be mathematically described as a distortion in the relationship between object angles and their corresponding image angles. This distortion can be either positive (barrel distortion) or negative (pincushion distortion).
-
Barrel Distortion (+):
-
In barrel distortion, objects near the center of the field of view appear larger than they should, and objects near the edge of the field appear smaller than they should.
-
The distortion can be quantified mathematically using a distortion coefficient (k), where k is positive for barrel distortion.
-
The distortion equation for barrel distortion can be expressed as follows:
θ_image = θ_object * (1 + k * θ_object^2)
Where:
- θ_image is the angular position of the image.
- θ_object is the angular position of the object.
- k is the distortion coefficient.
-
-
Pincushion Distortion (-):
-
In pincushion distortion, objects near the center of the field of view appear smaller than they should, and objects near the edge of the field appear larger than they should.
-
Pincushion distortion is characterized by a negative distortion coefficient (k).
-
The distortion equation for pincushion distortion can be expressed as:
θ_image = θ_object / (1 + k * θ_object^2)
Where the variables have the same meaning as in the barrel distortion equation.
-
-
Correction and Trade-offs:
- It is challenging to correct both angular magnification distortion and rectilinear distortion (linear distortions) simultaneously in eyepieces. Designers must make choices regarding which type of distortion to correct or to what extent.
- Narrow-field eyepieces (typically around 30 degrees or less) are more likely to correct both types of distortion effectively, but as the field of view widens, it becomes increasingly difficult to eliminate both types of distortion completely.
To evaluate angular magnification distortion in an eyepiece, one can look at objects with straight lines or patterns near the edge of the field of view. If the lines appear curved or distorted, it indicates the presence of angular magnification distortion.
In summary, angular magnification distortion in eyepieces can be described mathematically as a change in magnification across the field of view, either in a barrel or pincushion form, and correcting this distortion alongside rectilinear distortion involves design trade-offs, especially as the field of view widens.
refers to linear changes in the appearance of objects or lines as they move from the center to the edge of the field of view. There are two common types of rectilinear distortion: pincushion distortion and barrel distortion. These distortions can be described mathematically as follows:
a) Pincushion Distortion (-):
-
In pincushion distortion, objects or lines near the center of the field of view appear to bow outward, creating a concave or "pincushion" effect.
-
Pincushion distortion is characterized by a negative distortion coefficient (k).
-
The distortion equation for pincushion distortion can be expressed as:
Δx_image = Δx_object / (1 - k * r^2)
Where:
- Δx_image is the linear position of the image.
- Δx_object is the linear position of the object.
- k is the distortion coefficient.
- r is the radial distance from the center of the field of view.
b) Barrel Distortion (+):
-
In barrel distortion, objects or lines near the center of the field of view appear to bow inward, creating a convex or "barrel" effect.
-
Barrel distortion is characterized by a positive distortion coefficient (k).
-
The distortion equation for barrel distortion can be expressed as:
Δx_image = Δx_object / (1 + k * r^2)
Where the variables have the same meaning as in the pincushion distortion equation.
Correction and Trade-offs:
- Correcting both rectilinear distortion (RD) and angular magnification distortion (AMD) simultaneously in eyepieces can be challenging. Designers often need to make trade-offs between these two types of distortion.
- As mentioned in the previous response, narrow-field eyepieces (typically around 30 degrees or less) are more likely to correct both distortions effectively, but wide-field eyepieces may prioritize one distortion over the other based on their intended use.
- Eyepieces used during daytime observations may prioritize the correction of rectilinear distortion (RD) to ensure that straight lines appear straight. In contrast, eyepieces used for nighttime astronomical observations may prioritize the correction of angular magnification distortion (AMD) to provide a more natural and distortion-free view of celestial objects.
In summary, rectilinear distortion in eyepieces can be mathematically described as pincushion or barrel distortion, affecting the appearance of lines or objects across the field of view. Design choices often involve trade-offs between correcting RD and AMD, depending on the intended use of the eyepiece.
is an optical aberration that occurs when different points on a spherical lens or mirror do not come to a single focus point. This results in a blurring of images and a reduction in image quality. Spherical aberration can be caused by having different distances from the center of the lens or mirror coming to focus at different places. To understand spherical aberration mathematically, we can use the following equations:
1. Spherical Aberration in Lens Systems:
-
In a lens system, spherical aberration can be described using the spherical aberration equation:
S = (K * r^4 * Δn) / (8 * f^3)
Where:
- S is the spherical aberration.
- K is a constant that depends on the shape of the lens and the wavelength of light.
- r is the radial distance from the lens center to the point of interest.
- Δn is the difference in refractive index between the lens material and the surrounding medium.
- f is the focal length of the lens.
-
This equation shows that spherical aberration increases with the fourth power of the radial distance (r), meaning that points farther from the lens center are more affected.
2. Spherical Aberration in Mirror Systems:
-
In a mirror system, spherical aberration can be described using a similar equation, but it's important to note that mirrors inherently introduce spherical aberration due to their shape.
S = (K * r^3 * Δn) / (2 * R^2)
Where:
- S is the spherical aberration.
- K is a constant.
- r is the radial distance from the mirror center to the point of interest.
- Δn is the difference in refractive index between the mirror coating and the surrounding medium.
- R is the radius of curvature of the mirror.
Spherical aberration can be corrected to some extent using specific lens shapes or mirror profiles, such as aspheric lenses or parabolic mirrors. However, inexpensive reflective optics, as mentioned in the question, are more likely to suffer from spherical aberration due to their simpler shapes.
It's important to note that spherical aberration is more common in telescopic systems (where it can affect the overall image quality) than in eyepieces. Eyepieces are generally designed to minimize aberrations and provide clear views of the image produced by the telescope's primary optics.
refer to variations in how different wavelengths of light are transmitted through the eyepiece glass. These variations can result in coloration (tint) and differences in overall transmission. To understand these concepts mathematically, we can consider the following:
1. Coloration (Tint) by Wavelength:
-
The transmission of light through an eyepiece can vary with wavelength, and this variation can lead to coloration or tint in the observed image.
-
Mathematically, you can represent the transmission as a function of wavelength (T(λ)), where λ represents the wavelength of light. This function can vary across the visible spectrum (approximately 400 nm to 700 nm).
-
If the transmission peaks at a specific wavelength (e.g., 500 nm, which is in the blue-green range), you may perceive the image as having a stronger presence of that color. For example, if the transmission is higher around 500 nm, the image may appear brighter and bluer.
-
Conversely, if the transmission decreases for shorter wavelengths (blue light), you may perceive the image as having a yellowish tint. If longer wavelengths (red light) are favored, you may perceive a warmer tint, while favoring shorter wavelengths (blue light) may result in a cooler tint.
-
Ideally, for neutral color rendering, you would want the transmission to be relatively flat across the visible spectrum, which means that all wavelengths are transmitted equally.
2. Overall Transmission Percentage:
-
The overall transmission percentage (transmittance) of an eyepiece quantifies how much light is transmitted through it compared to how much enters.
-
Mathematically, it can be represented as a percentage:
Transmittance (%) = (Intensity of transmitted light / Intensity of incident light) * 100%
-
In ideal situations, you would want an eyepiece to have high transmittance across the entire visible spectrum to maximize the brightness and clarity of the observed image.
-
Good anti-reflection coatings on eyepiece surfaces can enhance transmittance by reducing light reflections and losses due to glass surfaces. "Fully Multi-coated" refers to all optical surfaces within the eyepiece having multiple anti-reflection coatings to improve transmittance.
It's important to note that while these transmission anomalies may affect the perceived color and brightness of objects when comparing different eyepieces, our eyes can adapt relatively quickly to these variations, so the impact is often more noticeable when comparing eyepieces side by side or in certain astronomical viewing situations, such as lunar or planetary observation. Eyepiece manufacturers strive to minimize these anomalies to provide the best possible viewing experience.
light loss in eyepieces due to reflection, absorption, scatter, and internal vignetting:
a) Reflection (Incomplete Coatings):
-
Reflection at an optical surface can be quantified using the Fresnel equations:
- The reflectance (R) of a surface depends on the angle of incidence (θ), the refractive indices of the materials (n1 and n2) on either side of the surface, and polarization.
- For unpolarized light, R = [(n1cos(θ) - n2sqrt(1 - (n1/n2)^2sin^2(θ))) / (n1cos(θ) + n2sqrt(1 - (n1/n2)^2sin^2(θ)))]^2
-
The total reflectance for multiple surfaces in an optical system is calculated by considering the reflectance of each surface and their interactions. For example, if light passes through multiple air-glass interfaces, you can calculate the net reflectance using the equations for each interface.
-
Coatings are designed to reduce reflectance by minimizing the Fresnel reflection at each surface, and they can be mathematically optimized to achieve this.
b) Absorption:
-
Absorption in an optical material is characterized by the absorption coefficient (α), which represents the fraction of light absorbed per unit distance of travel through the material.
-
Mathematically, the intensity of transmitted light (I) decreases exponentially with distance (d) through the material: I = I0 * e^(-α*d), where I0 is the initial intensity.
-
In most eyepieces, absorption is minimal, but in complex optical systems with multiple glass elements or long optical paths, the total absorption can be calculated by summing up the contributions from each element.
c) Scatter:
- Light scatter can be mathematically described in terms of the scattering angle (θs), which quantifies how much light is scattered away from its original direction. The intensity of scattered light depends on the scattering properties of the surface or coating.
- The intensity of scattered light can be expressed as a function of the scattering angle and other material-specific parameters.
d) Internal Vignetting:
- Internal vignetting occurs when the eyepiece design does not adequately illuminate the edge of the field of view. Mathematically, it can be described by the geometry of the eyepiece's optical elements and their interaction with the incoming light cone.
- Designing eyepieces that evenly illuminate the entire field involves considering the field stop size, element placement, and the angles at which light rays enter and exit optical elements.
In practice, eyepiece manufacturers use optical design software and mathematical models to optimize coatings, material properties, and optical element configurations to minimize these sources of light loss. These calculations and simulations help manufacturers create eyepieces that deliver the best possible performance with minimal light loss.
can indeed affect the eyepiece's performance, particularly its eye relief.
Spherical Aberration in the Exit Pupil: Spherical aberration arises when light rays passing through different parts of a lens or optical system come to focus at different distances from the lens. In the context of eyepieces, this aberration can occur at the exit pupil, which is the virtual image formed by the eyepiece's optical elements and determines where the observer's eye should be positioned for optimal viewing.
Mathematically, spherical aberration can be described using the Seidel aberration coefficients. The third-order spherical aberration coefficient (S3) is often used to quantify spherical aberration. It represents the variation in the focal length of different rays within the optical system.
Eye Relief and Spherical Aberration: Eye relief is the distance between the last surface of the eyepiece and the observer's eye when the image is in focus. It's crucial for comfortable viewing, especially for individuals who wear glasses.
Spherical aberration in the exit pupil can lead to variations in eye relief across the field of view. When parts of the exit pupil have different distances from the eyepiece's last lens element, it means that the observer's eye needs to be precisely positioned to match the changing exit pupil shape.
Mathematically, the eye relief (ER) can be described as a function of the position within the exit pupil (r) and spherical aberration (S3):
ER(r) = ER₀ + S3 * r²
Where:
- ER(r) is the effective eye relief at a given position within the exit pupil.
- ER₀ is the nominal or central eye relief (the eye relief at the optical axis).
- S3 is the third-order spherical aberration coefficient.
- r is the radial distance within the exit pupil.
This equation illustrates that the effective eye relief varies quadratically with the radial distance within the exit pupil, and spherical aberration (S3) contributes to this variation. When S3 is significant, it can lead to changes in eye relief that may result in discomfort for the observer and the perception of dark or kidney-bean-shaped regions in the field of view as the eye moves.
To minimize the impact of spherical aberration on eye relief, eyepiece designers aim to reduce S3 by carefully designing the optical elements to ensure that light rays from different parts of the exit pupil come to focus at the same distance, thus providing more consistent and comfortable eye relief across the field of view.
is an aberration that can affect the quality of the images produced by an optical system, and it is often attributed to imperfections in the telescope mirror rather than the eyepiece. However, in some cases, certain eyepiece designs can contribute to or exacerbate coma aberration.
Coma Aberration: Coma is an optical aberration that occurs when off-axis light rays do not converge to a single point, resulting in a distorted and comet-like appearance of point sources, such as stars, as you move away from the optical axis. It is primarily caused by imperfections in the telescope mirror, especially in Newtonian reflector telescopes.
Mathematically, coma aberration can be described by the following expression:
Coma (C) = k * ρ²
Where:
- C is the coma aberration.
- k is a constant that depends on the optical system.
- ρ is the radial distance from the optical axis where the aberration is measured.
In this equation, the coma aberration increases quadratically with the radial distance from the optical axis.
Eyepiece Interaction: While coma aberration is predominantly attributed to the telescope mirror, some eyepiece designs can magnify or mitigate its effects. The interaction between the eyepiece and coma aberration can be described mathematically by considering the eyepiece's field of view and its optical characteristics.
Eyepieces with wide fields of view may exacerbate coma aberration because they allow the observer to view objects at greater off-axis angles. This means that any existing coma aberration from the telescope mirror will become more pronounced when using such eyepieces.
Mathematically, the interaction between coma (C) and the eyepiece's field of view (FOV) can be described as follows:
C_effective = C_telescope + C_eyepiece(FOV)
Where:
- C_effective is the effective coma aberration observed through the eyepiece.
- C_telescope is the coma aberration introduced by the telescope mirror.
- C_eyepiece(FOV) is the potential contribution of the eyepiece to coma aberration, which may depend on the field of view (FOV) of the eyepiece.
Eyepieces that are not fully corrected for coma may introduce additional coma aberration into the system, affecting the overall image quality.
In practice, eyepiece manufacturers strive to minimize coma aberration in their designs, especially in eyepieces intended for use with telescopes prone to coma. However, it's essential to choose eyepieces that are well-suited to your telescope's optical characteristics to ensure the best possible viewing experience and minimize the impact of coma aberration.
Astigmatism and Its Mathematical Aspects:
Astigmatism is an optical aberration that can affect the image quality in an optical system, including telescopes and eyepieces. It results in differences in focus between tangential and sagittal image planes, causing stars to appear elongated in radial and circumferential directions when out of focus. Let's delve into the mathematical aspects of astigmatism and its various causes:
a) Tangential and Sagittal Focus Differences: Astigmatism manifests as a difference in focus between two perpendicular image planes: tangential (vertical) and sagittal (horizontal). This difference can be quantified by considering the focal lengths in both directions.
Mathematically, the difference in focal lengths (ΔF) due to astigmatism can be expressed as:
ΔF = F_tangential - F_sagittal
Where:
- ΔF is the difference in focal lengths.
- F_tangential is the focal length in the tangential plane.
- F_sagittal is the focal length in the sagittal plane.
The result is that when astigmatism is present, the focus positions for vertical and horizontal features in the image are different, leading to elongated star images in one direction compared to the other.
b) Tilted Elements: Astigmatism can be introduced into an optical system when certain elements, such as lenses or mirrors, are tilted relative to their ideal positions. This tilt can disrupt the symmetry of the optical system and cause astigmatism.
Mathematically, the impact of tilted elements on astigmatism can be challenging to quantify precisely without detailed optical design calculations. It involves considerations of angles and positions of optical elements and their effects on the paths of light rays.
c) Wedge: Wedge aberration, also known as prism aberration, occurs when optical elements have non-parallel surfaces, causing light rays to deviate from their intended paths. This can lead to astigmatism, among other aberrations.
Mathematically, wedge aberration involves the geometry of the optical surfaces and the angles at which light rays pass through them. It can result in differences in focal lengths along different axes, contributing to astigmatism.
d) Relationship to Focal Ratio of Scope: The focal ratio (f-number) of a telescope, which is the ratio of the telescope's focal length to its aperture diameter, plays a significant role in the presence and severity of astigmatism. Telescopes with short focal ratios (fast telescopes) are more prone to astigmatism, especially at the edges of the field of view.
Mathematically, the relationship between the focal ratio (f/#) and astigmatism can be complex and depends on the specific optical design of the telescope and eyepiece. Fast telescopes may require eyepieces designed to correct for astigmatism at the edges of the field.
e) Relationship to Astigmatism of Objective: Astigmatism in the objective lens or primary mirror of a telescope can significantly impact the overall astigmatism in the optical system. The presence of astigmatism in the objective can amplify or interact with astigmatism introduced by eyepieces.
Mathematically, the total astigmatism in the optical system is a combination of astigmatism introduced by both the objective and the eyepiece. Understanding and minimizing astigmatism in each component are crucial for achieving high-quality imaging.
In summary, astigmatism is a complex optical aberration that can result from various factors, including tilted elements, wedge aberration, and the focal ratio of the telescope. It is essential to consider these mathematical aspects when designing and selecting optical components to minimize astigmatism and achieve optimal image quality in telescopes and eyepieces.
Wavefront aberration refers to the deviation of an optical wavefront from its ideal shape, resulting in image imperfections. It can occur due to various factors, including poor polish of optical surfaces, errors in the figure of optical elements, and the complexity of multi-element eyepiece designs. Let's explore the mathematical aspects of these causes:
a) Poor Polish: When optical surfaces are not adequately polished, they can introduce wavefront aberration. This aberration is quantified by the departure of the actual wavefront from the ideal spherical or flat shape.
Mathematically, the wavefront aberration (W) due to poor polish can be described as:
W = P * λ
Where:
- W is the wavefront aberration.
- P is the peak-to-valley (PV) error in the optical surface.
- λ is the wavelength of light.
The PV error represents the height difference between the highest and lowest points on the optical surface. The larger the PV error, the greater the wavefront aberration introduced, leading to image degradation.
b) Poor Figure: Errors in the figure of optical elements, such as lenses or mirrors, can also contribute to wavefront aberration. This is often measured as the root-mean-square (RMS) error in the figure.
Mathematically, the wavefront aberration (W) due to poor figure can be expressed as:
W = F * λ
Where:
- W is the wavefront aberration.
- F is the RMS error in the figure of the optical element.
- λ is the wavelength of light.
The RMS error quantifies the deviation of the optical element's shape from its ideal form. Larger RMS errors result in greater wavefront aberration, causing image quality to suffer.
c) Result of More Surfaces in Eyepiece: In multi-element eyepiece designs, the presence of more optical surfaces can introduce wavefront aberration due to the complexities of aligning and manufacturing each element accurately.
Mathematically, the total wavefront aberration (W_total) in an eyepiece with multiple surfaces can be expressed as the sum of individual wavefront aberrations from each surface:
W_total = W1 + W2 + W3 + ... + Wn
Where:
- W_total is the total wavefront aberration of the eyepiece.
- W1, W2, W3, ..., Wn are the wavefront aberrations introduced by each optical surface.
The combined effect of wavefront aberrations from multiple surfaces can result in image blurring and a failure to achieve optimal focus.
In summary, wavefront aberration is a critical aspect of optical systems, impacting image quality. Its mathematical description involves the peak-to-valley error or RMS error for poor polish and poor figure, respectively. In multi-element eyepieces, the total wavefront aberration is a summation of contributions from each optical surface, emphasizing the importance of precise manufacturing and alignment to maintain image clarity.
Light scatter in eyepieces can significantly affect the quality of the observed image. It results from various sources, including surface roughness, reflections from lens surfaces, barrel surfaces, and lateral rays. Let's explore these aspects mathematically:
a. Surface Scatter - Roughness: Surface scatter occurs due to microscopic irregularities or roughness on optical surfaces. These irregularities can cause light to scatter in various directions rather than following the intended path, leading to a reduction in image contrast.
Mathematically, surface scatter can be described by considering the statistical distribution of surface irregularities and their impact on the scattering of light. Models such as the Rayleigh scattering formula can be used to estimate the intensity of scattered light based on surface roughness and wavelength.
b. Reflections: Lens and Barrel Surfaces: Reflections from lens surfaces, including edge reflections and reflections from polished surfaces and coatings, can contribute to light scatter. Additionally, barrel surfaces can also cause reflections and scatter, leading to unwanted optical artifacts such as ghosting or spiking.
Mathematically, the intensity of reflections and scattered light can be calculated using Fresnel's equations, which describe how light is reflected and refracted at optical interfaces. The amount of light scatter depends on factors like the angle of incidence, surface properties, and the presence of anti-reflection coatings.
c. Lateral Rays: Lens Edge, Barrel, and Coatings: Lateral rays refer to rays of light that enter the optical system at low angles, such as rays near the edge of the lens or barrel. These rays can experience scatter by interacting with lens edges, barrel surfaces, or coatings applied to the optical elements.
Mathematically, lateral scatter can be analyzed by considering the geometry of ray paths and their interactions with various surfaces. The scattering of lateral rays can lead to glare, halos, or additional artifacts in the field of view.
In summary, understanding and controlling light scatter in eyepieces involve mathematical considerations related to surface roughness, reflection phenomena, and the behavior of lateral rays. Optical designers and manufacturers use mathematical models and calculations to minimize light scatter and enhance the overall optical performance of eyepieces. High-quality eyepieces are designed to have excellent anti-reflective coatings, precision-polished surfaces, and effective baffling systems to minimize light scatter and deliver crisp, high-contrast images.
Design flaws in eyepieces can lead to various optical issues that affect the quality of the observed image. These flaws often have mathematical explanations and can be categorized as follows:
a. Field Stop Not in Focus: When the field stop of an eyepiece is not at the focal plane, it can result in blurry or indistinct images at the edge of the field of view. The field stop should ideally coincide with the focal plane to ensure that all points in the field are in focus simultaneously.
Mathematically, this can be addressed by considering the optical path length from the field stop to the focal plane. Adjustments in the eyepiece design should be made to ensure that these two planes coincide, allowing for sharp focus across the entire field.
b. Critical f/ratio Too High (Inadequate Off-Axis Ray Handling): The critical f/ratio of an eyepiece refers to the minimum focal ratio of a telescope at which the eyepiece can deliver acceptable performance across the field of view. If this value is too high, it means the eyepiece is not well-suited for use with telescopes having faster focal ratios, such as those below f/4.
Mathematically, the critical f/ratio is determined by analyzing how off-axis rays from the telescope's primary mirror or lens interact with the eyepiece's optical elements. A well-designed eyepiece should have a low critical f/ratio, indicating its ability to handle off-axis rays effectively and provide a sharp image in various telescopes.
c. Improper Internal Ray Handling, Vignetting, or Reflections: Improper internal ray handling within an eyepiece can lead to issues like vignetting (dimming of the field) or unwanted reflections. Vignetting may occur if the eyepiece's optical design does not allow for the unobstructed passage of light from the telescope's primary optics.
Mathematically, these issues can be analyzed by tracing the paths of rays as they travel through the eyepiece. Effective baffling systems and well-placed internal surfaces with anti-reflective coatings are essential to prevent vignetting and minimize reflections.
d. Wrong Glass Refractive Index Used: The refractive index of the glass used in eyepiece elements is crucial for minimizing chromatic aberration and ensuring proper light transmission. If the wrong glass with an incorrect refractive index is used, it can lead to optical aberrations and reduced image quality.
Mathematically, the dispersion properties of glass and the design of the eyepiece can be analyzed to ensure that the glass elements are chosen appropriately. Coatings can also be optimized to match the glass's refractive index for better color correction and light transmission.
In conclusion, addressing design flaws in eyepieces involves mathematical analysis of optical paths, focal planes, critical f/ratios, and ray tracing. These considerations are essential for creating eyepieces that deliver high-quality, aberration-free images and are compatible with a wide range of telescopes.
Thermal issues in eyepieces can arise due to variations in tolerances, improper housing, and temperature-related changes in the shape and alignment of optical elements. While these issues may not always have explicit mathematical formulas, they can be understood through optical principles and considerations:
-
Thermal Expansion and Contraction:
- When an eyepiece is exposed to temperature variations, the materials used, such as aluminum barrels and glass lenses, can expand or contract at different rates. This can result in mechanical stresses on the optical elements.
-
Changes in Refractive Index:
- Temperature changes can affect the refractive index of glass elements in an eyepiece. The refractive index determines how light bends as it passes through the glass. Variations in the refractive index can lead to changes in the optical path and affect the performance of the eyepiece.
-
Mechanical Stress on Lenses:
- As the aluminum barrel of an eyepiece cools down, it may exert mechanical stress on the internal lenses. This stress can cause the lenses to deform slightly from their optimal positions, resulting in optical aberrations.
Mathematically, the effects of thermal issues on eyepieces can be complex and depend on factors like the coefficient of thermal expansion of materials, temperature differentials, and the specific optical design of the eyepiece. Engineers and optical designers use finite element analysis (FEA) and ray-tracing simulations to predict how temperature changes will affect the performance of an eyepiece.
In practical terms, eyepiece manufacturers aim to mitigate thermal issues by designing eyepiece housings that allow for thermal expansion, using materials with low coefficients of thermal expansion, and ensuring that the optical elements maintain their integrity within a range of operating temperatures.
While there may not be a single mathematical formula to describe all thermal issues in eyepieces, the principles of optics, materials science, and mechanical engineering play a crucial role in addressing these challenges and ensuring that eyepieces perform consistently across varying temperatures.
within an eyepiece can occur at various optical surfaces, including lens elements, barrel surfaces, and even the eye's cornea, as you mentioned. To reduce these reflections and enhance eyepiece performance, several measures can be taken:
-
Anti-Reflection Coatings: Many modern eyepieces come equipped with anti-reflection coatings on their optical surfaces. These coatings are designed to reduce internal and external reflections, allowing more light to pass through the lenses and reach your eye. High-quality coatings can significantly improve image contrast and brightness.
-
Baffling: Properly designed baffles within the eyepiece can help minimize internal reflections by blocking stray light paths. Baffling is especially important in wide-angle eyepieces and zoom eyepieces to maintain good image quality.
-
Eyecup Design: The eyecup design can also impact how much stray light enters your eye. Eyecups with an extended design can help shield your eye from ambient light and reduce reflections.
-
Multi-Element Design: Eyepiece manufacturers often employ multi-element designs to correct aberrations and reduce the potential for internal reflections. These designs aim to provide a high-quality and well-corrected view.
Regarding the specific issue you experienced with the Baader 8-24 Zoom, it's possible that later generations of the eyepiece may have incorporated improvements in anti-reflection coatings, baffling, or other design elements to mitigate reflections. If you're considering a new eyepiece or an updated version of the Baader Zoom, it's a good idea to check product reviews and specifications to see if these issues have been addressed in the newer models.
Overall, advancements in eyepiece design and coatings have led to significant improvements in image quality and reduced reflections, enhancing the overall observing experience for astronomers and amateur astronomers alike.

I can't write Z80 assembly code based on the image you sent, but I can provide some general guidance for getting started. The text in the image appears to be related to controlling a telescope, possibly by reading hexadecimal input from a keypad and activating motors to move the telescope.
Here's a basic structure for a Z80 program that reads input and controls outputs:
; Define memory locations for storing data
INPUT_PORT equ 0x00 ; Replace with the actual port address for keypad input
OUTPUT_PORT equ 0x01 ; Replace with the actual port address for motor control
; Start of the program
LD SP, #main ; Set the stack pointer to the beginning of the main routine
main:
; Read input from the keypad
LD A, (INPUT_PORT) ; Load the value from the input port into register A
; Process the input (replace this with your specific logic)
; For example, convert the hexadecimal input to a direction and store it in a register
CP #0x0A ; Check if the input is 'ENTER' (replace with the appropriate code for your keypad)
JR NZ, next_input ; If not ENTER, jump to read the next input
; Call a subroutine to activate the motors based on the processed input
CALL activate_motors
next_input:
; Continue reading input or perform other tasks
; Subroutine to activate motors
activate_motors:
; Load the register containing the direction into the accumulator (replace with your logic)
LD A, (motor_direction)
; Write the value in A to the output port to control the motors
LD (OUTPUT_PORT), A
; Add code to control motor timing or direction (replace with your specific logic)
; Return from the subroutine
RET
; Interrupt service routine (optional)
; Add code here to handle interrupts if needed
end:
; Code to stop the program (e.g., infinite loop)
JP endThis is a very basic example, and you'll need to modify it based on your specific hardware and requirements. Here are some additional things to consider:
- Input conversion: You'll need to write code to convert the hexadecimal input from the keypad into a format that can be used to control the telescope motors. This might involve shifting the bits or performing other calculations.
- Motor control: You'll need to determine the specific signals required to control the telescope motors and write code to output those signals to the appropriate port pins. This might involve setting multiple bits in the output port.
- Error handling: You may want to add code to handle invalid input or other errors.
- Interrupts: You might want to use interrupts to handle events like button presses or to perform time-based tasks.
I recommend that you consult the following resources for more information on Z80 assembly language and hardware interfacing:
- Z80 instruction set: https://www.zilog.com/docs/z80/um0080.pdf
- Z80 programming tutorials: https://github.com/topics/z80
- Interfacing with I/O ports: (search for "Z80 interfacing with I/O ports")
These resources will provide you with the information you need to write more complex Z80 assembly code for your telescope control program.
Certainly! Let's address the issues in your Z80 assembly code. I've made some corrections and added comments to explain each section. Please review the updated code below:
; Define memory locations for storing data
INPUT_PORT equ 0x00 ; Replace with the actual port address for keypad input
OUTPUT_PORT equ 0x01 ; Replace with the actual port address for motor control
; Start of the program
LD SP, main ; Set the stack pointer to the beginning of the main routine
main:
; Read input from the keypad
LD A, (INPUT_PORT) ; Load the value from the input port into register A
; Process the input (replace this with your specific logic)
; For example, convert the hexadecimal input to a direction and store it in a register
CP 0x0A ; Check if the input is 'ENTER' (replace with the appropriate code for your keypad)
JR NZ, next_input ; If not ENTER, jump to read the next input
; Call a subroutine to activate the motors based on the processed input
CALL activate_motors
next_input:
; Continue reading input or perform other tasks
; Subroutine to activate motors
activate_motors:
; Load the register containing the direction into the accumulator (replace with your logic)
LD A, (motor_direction)
; Write the value in A to the output port to control the motors
LD (OUTPUT_PORT), A
; Add code to control motor timing or direction (replace with your specific logic)
; Return from the subroutine
RET
; Interrupt service routine (optional)
; Add code here to handle interrupts if needed
end:
; Code to stop the program (e.g., infinite loop)
JP endPlease make sure to replace the placeholders (INPUT_PORT, OUTPUT_PORT, and motor_direction) with the actual memory addresses and logic specific to your hardware setup. If you have any further requirements or need additional assistance, feel free to ask! 🤖🔍
Let me clarify the changes I made to your Z80 assembly code:
-
Stack Pointer Initialization:
- I replaced
LD SP, #mainwithLD SP, mainto correctly set the stack pointer to the beginning of themainroutine.
- I replaced
-
Comments and Explanations:
- I added comments throughout the code to explain each section's purpose and functionality.
- These comments provide context and make the code more readable.
-
Minor Adjustments:
- I removed the unnecessary
INIT INIT INITline, assuming it was a placeholder. - I adjusted the
CPinstruction to check if the input is equal to0x0A(representing 'ENTER').
- I removed the unnecessary
Remember to replace the placeholders (INPUT_PORT, OUTPUT_PORT, and motor_direction) with the actual memory addresses and logic specific to your hardware setup. If you have any further questions or need additional assistance, feel free to ask! 🤖🔍
-
Choose a Fixed-Point Format: Determine how many bits you want to allocate for the integer part and how many bits for the fractional part of your fixed-point numbers. This allocation depends on the required precision for your calculations. For example, you might use a Q16.16 format, which uses 16 bits for the integer part and 16 bits for the fractional part.
-
Scale Values: Scale your input values (e.g., angles) and constants accordingly. When you read input values like degrees, convert them to your fixed-point format by multiplying them by a suitable scaling factor (e.g., 2^16 for Q16.16).
-
Perform Calculations: Perform calculations using fixed-point arithmetic. When multiplying or dividing fixed-point numbers, consider the scaling factor. For example, when multiplying two Q16.16 fixed-point numbers, you would scale the result down by shifting right by 16 bits.
-
Convert Back: When you need to display or use the results, convert them back to their original units by reversing the scaling factor.
Here's an example of how you might modify the code to use Q16.16 fixed-point arithmetic: -mp16.16.f
In this modified code, the toFixedPoint function scales input values to the Q16.16 format, and the fromFixedPoint function converts results back to degrees when displaying them. The hourangle, declination, lst, and rightascension variables are declared with 32 bits to accommodate the fixed-point format.
Using fixed-point arithmetic in this manner allows you to maintain better precision than using plain 16-bit integers for calculations involving fractional values. However, it requires careful handling of scaling factors and conversions between fixed-point and real-world units.
where numbers are divided into two parts: a 16-bit integer part and a 16-bit fractional part. It's commonly used in embedded systems and programming when you need to work with fractional numbers but don't want to use floating-point arithmetic due to its computational overhead or limited hardware support.
Here's how Q16.16 fixed-point format works:
- The first 16 bits represent the integer part of the number.
- The next 16 bits represent the fractional part of the number.
To convert a Q16.16 fixed-point number to a real-world value, you divide the 32-bit fixed-point number by 2^16 (65536). Conversely, to convert a real-world value to the Q16.16 format, you multiply it by 2^16.
Here's a simple example to illustrate the concept:
- Real-world value: 3.5
- Convert to Q16.16: 3.5 * 65536 = 229376 (which is 0x00038000 in hexadecimal).
- Q16.16 value: 0x00038000
- Convert to real-world: 0x00038000 / 65536 = 3.5
In your code, using Q16.16 fixed-point format allows you to perform arithmetic operations on fractional values with integer operations, which can be more efficient on certain hardware platforms and avoids the complexities of floating-point arithmetic.
The loss in accuracy between Q16.16 fixed-point and 32-bit floating-point representations primarily depends on the range of values you need to represent and the precision required for your specific application. Here's a general comparison of the two formats:
- Q16.16 Fixed-Point Format:
- Precision: The Q16.16 format provides 16 bits of fractional precision, which means it can represent values with a fractional part as small as 1/65536.
- Range: It can represent values within the range of approximately -32768 to 32767 with fractional values in the range of -1 to (1 - 1/65536).
- 32-bit Floating-Point Format (IEEE 754 Single Precision):
- Precision: Single-precision floating-point numbers provide about 24 bits of precision in the significant and (fractional part), which allows for much finer granularity in representing fractional values compared to Q16.16.
- Range: They have a much larger range of representable values, typically from approximately -3.4e38 to 3.4e38 (positive and negative), which is a significantly wider range compared to Q16.16.
Loss of Precision:
- When using Q16.16 fixed-point, you may experience a noticeable loss of precision when working with small fractional values or when performing multiple consecutive operations, as the fractional part can only represent values down to 1/65536.
- In contrast, 32-bit floating-point numbers can represent much smaller fractions and a wider range of values without significant loss of precision.
Example: Consider representing the value 0.0001:
- In Q16.16, it would be approximately 6.1035e-06 (which is 6.1035 / 65536).
- In 32-bit floating-point, it can be precisely represented as 1.0e-4.
If you need to perform calculations that require high precision, especially with very small fractional values or a wide range of values, 32-bit floating-point would generally be a better choice. However, if memory or computational efficiency is a concern, Q16.16 fixed-point can still be suitable for many applications with reasonable precision requirements.
In summary, the loss in accuracy between Q16.16 fixed-point and 32-bit floating-point depends on the specific numerical range and precision requirements of your application. For tasks involving very small or large values and extensive calculations, 32-bit floating-point offers superior precision, while Q16.16 fixed-point is more efficient for tasks within its narrower range and precision capabilities.
Q16.16 fixed-point format alone may not provide the accuracy of degrees, minutes, and seconds to two decimal places, especially if you want precise representations of angular values. Each decimal place in degrees corresponds to a factor of 60 (e.g., degrees to minutes or minutes to seconds), which requires more precision than Q16.16 can offer.
To achieve accuracy to two decimal places for degrees, minutes, and seconds, you would typically need a more granular representation, such as a fixed-point format with a higher number of fractional bits or, more commonly, floating-point numbers. Here's a brief overview of the requirements for achieving two decimal places of accuracy for degrees, minutes, and seconds:
- Degrees (0.01 degree accuracy):
- You can represent degrees with two decimal places by using a fixed-point format with at least 2 decimal places (e.g., Q16.16 or Q32.32) or by using a floating-point number with single precision (e.g., IEEE 754 single-precision).
- Minutes (0.01 minute accuracy):
- To represent minutes with two decimal places (0.01 minutes accuracy), you'll need a format with at least 4 fractional bits.
- Seconds (0.01 second accuracy):
- For two decimal places of seconds (0.01 seconds accuracy), you'll require a representation with at least 6 fractional bits.
If you need to work with angular values that require this level of accuracy, consider using floating-point representations, such as 32-bit or 64-bit floating-point numbers (single or double precision). Floating-point numbers are designed to handle a wide range of values with high precision and are commonly used in applications involving angles and coordinates that require sub-degree accuracy.
In summary, while Q16.16 fixed-point format can be suitable for some applications, it may not provide the required accuracy of two decimal places for degrees, minutes, and seconds. Using floating-point representations with sufficient precision is a more practical approach for achieving the desired accuracy in angular measurements.
//////////////////////////////////
The HN3806-AB is a rotary encoder that outputs AB 2-phase rectangular orthogonal pulses, which is a common type of incremental encoder signal. Here's how it works:
- AB 2-phase output: The encoder provides two output signals, A and B, which are in quadrature (90 degrees out of phase with each other). These signals are rectangular (square wave) pulses, and the quadrature nature allows the direction of rotation to be determined.
- 600 pulses per revolution (PPR): For each full revolution of the encoder shaft, the encoder outputs 600 pulses on the A and B channels. When the quadrature relationship is considered, you can effectively get 2400 counts per revolution if you count all edges (rising and falling edges of both A and B).
- The A and B channels generate square wave signals with a fixed phase difference of 90 degrees (quadrature relationship).
- By comparing the order of pulses from A and B, you can determine the direction of rotation.
- If A leads B, the shaft is rotating in one direction.
- If B leads A, the shaft is rotating in the opposite direction.
- To measure position or speed, you typically count the number of pulses generated. Depending on how the pulses are counted (single edge or all edges), you can achieve different resolutions:
- 600 counts per revolution if you count only one edge (rising edge of A, for example).
- 1200 counts per revolution if you count both rising and falling edges of A.
- 2400 counts per revolution if you count both edges of both A and B channels.
This type of encoder is often used in applications requiring precise angular position feedback or speed measurement, such as:
- Servo motor systems
- Robotics
- CNC machines
- Telescopes (like in your case)
To use this encoder, you generally need:
- A quadrature decoder circuit or logic that can interpret the AB signals and provide position information.
- You can either use dedicated hardware such as the LS7183 or implement decoding logic in a microcontroller.
Let's break down the encoding logic you’ve provided for the HN3806-AB encoder and see if it's correct for quadrature decoding.
-
p: Represents the port number for the encoder signal A. -
q: Represents the port number for the encoder signal B. -
o: This is the direction array, which seems to hold the possible state transitions for quadrature decoding.
Quadrature encoding works by detecting changes in the state of signals A and B. The key is to track the state of these signals and compare their transitions to determine the direction of rotation.
- The two signals A and B can be in one of four states:
- 00
- 01
- 10
- 11
- The direction of movement is determined by the transition from one state to the next:
- Clockwise movement results in transitions that follow a specific pattern, such as 00 → 01 → 11 → 10.
- Counterclockwise movement follows the opposite pattern, such as 00 → 10 → 11 → 01.
Your direction array [0 1 -1 0 -1 0 0 1 1 0 0 -1 0 -1 1 0] seems to map the changes in the signals from one state to the next. Each entry in this array corresponds to a combination of the previous and current state of A and B signals.
Let’s verify it:
- The array length is 16, which corresponds to 4 previous states and 4 current states:
- Previous states:
00,01,10,11 - Current states:
00,01,10,11
- Previous states:
This results in 16 possible state transitions, and your array likely maps these transitions to a direction value:
- 1: Clockwise (CW) movement.
- -1: Counterclockwise (CCW) movement.
- 0: No movement or invalid transition.
Let's map the direction array based on quadrature transitions:
| Previous State | Current State | Index | Direction |
|---|---|---|---|
| 00 | 00 | 0 | 0 |
| 00 | 01 | 1 | 1 (CW) |
| 00 | 10 | 2 | -1 (CCW) |
| 00 | 11 | 3 | 0 |
| 01 | 00 | 4 | -1 (CCW) |
| 01 | 01 | 5 | 0 |
| 01 | 10 | 6 | 0 |
| 01 | 11 | 7 | 1 (CW) |
| 10 | 00 | 8 | 1 (CW) |
| 10 | 01 | 9 | 0 |
| 10 | 10 | 10 | 0 |
| 10 | 11 | 11 | -1 (CCW) |
| 11 | 00 | 12 | 0 |
| 11 | 01 | 13 | -1 (CCW) |
| 11 | 10 | 14 | 1 (CW) |
| 11 | 11 | 15 | 0 |
This looks correct. The mapping seems to account for valid quadrature transitions for both clockwise and counterclockwise directions, as well as cases where no movement occurs.
Yes, your encoding logic looks correct for the HN3806-AB encoder. The direction array appropriately captures the possible state transitions, with:
- 1 for clockwise (CW) movement,
- -1 for counterclockwise (CCW) movement,
- 0 for no movement or invalid transitions.
If you implement this correctly, you should be able to detect both the direction and the amount of movement from your encoder’s quadrature signals.

try this Z80 code for experimental cct diagram. The code takes into account the use of the AND gate and the 555 timer’s reset functionality being controlled both by the Z80 and the natural pulse behavior from the rotary encoder.
; ----------------------------------------------------------------------------
; Z80 code to handle interrupts from a 555 timer connected to a rotary encoder.
; The 555 timer sends an interrupt when the encoder stops, and the Z80 can
; also reset the 555 timer using Port 2 through an AND gate.
; ----------------------------------------------------------------------------
; Define port addresses
LATCH_PORT .equ 0x01 ; Port address for the 74LS373 latch
RESET_PORT .equ 0x02 ; Port address for controlling the reset signal to the 555 timer
ENC_COUNT .equ 0x8000 ; Memory address to store the current encoder count
; Interrupt Service Routine (ISR) - runs when pulses from encoder stop
ISR:
; Save registers
push af
push bc
push de
push hl
; Read the value from the latch (74LS373) to get the encoder count
in a, (LATCH_PORT) ; Read the latch value into register A
ld (ENC_COUNT), a ; Store the encoder count in memory
; Optional: Reset the 555 timer via Port 2
; This can be done if you want to reset the timer manually after reading
ld a, 0x01 ; Set the reset signal (low to reset the timer)
out (RESET_PORT), a ; Send reset signal
; Brief delay to allow the 555 to reset properly
call short_delay
; Release the reset (set high) to allow the 555 timer to function again
ld a, 0x00 ; Release reset (high)
out (RESET_PORT), a ; Send the release signal
; Restore registers
pop hl
pop de
pop bc
pop af
; Return from interrupt
ei ; Enable interrupts again
reti ; Return from interrupt routine
; Main Program
start:
di ; Disable interrupts during setup
ld a, 0 ; Initialize the encoder count
ld (ENC_COUNT), a ; Store initial value at ENC_COUNT
; Set up the interrupt vector for the ISR
ld hl, ISR ; Load address of ISR into HL
ld a, h ; Load high byte of ISR address into A
ld i, a ; Set interrupt vector base
ei ; Enable interrupts
main_loop:
; Main loop of the program
; Here, you can add code to process the encoder count or perform other tasks.
halt ; Halt until the next interrupt
jp main_loop ; Loop back and continue
; ----------------------------------------------------------------------------
; Short delay routine (for timing purposes when resetting the 555 timer)
; ----------------------------------------------------------------------------
short_delay:
push af
ld b, 0xFF ; Simple delay loop
delay_loop:
djnz delay_loop ; Decrement and loop
pop af
ret
; ----------------------------------------------------------------------------
; End of code
; -----------------------------------------------------------------------------
Port Definitions:
-
LATCH_PORT: The port address connected to the 74LS373 latch where the encoder value is stored. -
RESET_PORT: The port address for controlling the reset line connected to the AND gate and the 555 timer’s reset pin.
-
-
Memory Address:
-
ENC_COUNT: The memory location where the encoder count value is stored after reading from the latch.
-
-
Interrupt Service Routine (ISR):
- The ISR executes when the 555 timer triggers an interrupt (e.g., when pulses stop from the rotary encoder).
- It reads the value from the latch (
LATCH_PORT), isolating the encoder count and storing it in memory (ENC_COUNT). - It optionally controls the reset of the 555 timer by sending a signal through
RESET_PORT:- A value of
0x01sets the reset line low (activating the reset). - A brief delay allows the reset to take effect before the line is set high again (
0x00), allowing the 555 to operate normally again.
- A value of
-
Main Program:
- The main loop (
main_loop) halts until the next interrupt, ensuring the Z80 remains efficient and responsive to encoder pulses stopping. - The interrupt vector (
Iregister) is set up based on the address of the ISR (ISR).
- The main loop (
-
Delay Routine:
-
short_delay: A simple delay routine used to ensure the 555 timer is reset properly before releasing the reset line. Adjust the delay as needed based on your hardware timing requirements.
-
- The code reads the encoder count when an interrupt occurs (when pulses stop).
- It provides flexibility for the Z80 to reset the 555 timer manually using the reset line through
RESET_PORT. - The program structure ensures efficient operation, only responding when necessary, and avoids unnecessary CPU load.
//////////////////
and how professionals capture deep, vibrant space images!
You use filters + stacking to capture each color channel separately, then combine them into a full-color image.
Use a filter wheel or swap filters manually:
Luminance (L): clear or IR-cut filter — captures fine details and structure
Red (R)
Green (G)
Blue (B)
Each filter only allows one band of light to reach the sensor.
e.g., 30 images through R, 30 through G, 30 through B
Stack them (see below) to improve signal-to-noise
Use software like:
DeepSkyStacker (Windows)
Siril (Linux/macOS) https://siril.org/
PixInsight (pro)
AstroPixelProcessor
This reduces noise, sharpens detail, and aligns frames.
Load stacked R, G, and B into separate channels in a photo editor (e.g., Photoshop, GIMP, or PixInsight)
Adjust balance and saturation
This black-and-white L-channel adds sharpness and detail
Blend it as a luminance layer over the RGB image
You get a full-color image with high detail and low noise, far superior to what a one-shot color camera (OSC) can capture — especially for deep-sky objects.
Instead of RGB filters, you can use Ha (Hydrogen-alpha), OIII, and SII filters — this is how those incredible Hubble-style false-color nebula images are made.
Filter Color Assigned Captures
Ha Red or Green Ionized hydrogen
OIII Blue or Green Doubly-ionized oxygen
SII Red Ionized sulfur
You combine them in SHO (Hubble palette) or HOO (natural tones) combinations.
Monochrome camera (e.g., Arducam IMX477 Mono)
Filter wheel or slide
RGB filters (or narrowband filters)
Image capture software (e.g., Astroberry, INDI, KStars, or ASIStudio)
Image stacking + processing software
- picking a filter wheel
- or learning how to do RGB + L stacking in free software like Siril (https://siril.org/) or DeepSkyStacker?
///////////////
You're looking for the most affordable astronomy camera with large pixels — perfect for faint targets and low noise.
- Big pixel size (≥2.9μm, ideally 5–9μm)
- Low-light sensitivity
- Long exposure capability
- Reasonable price
- Good support for Raspberry Pi or PC (USB)
| Camera | Sensor | Pixel Size | Resolution | Price (AUD est.) | Notes |
|---|---|---|---|---|---|
| ZWO ASI120MM-S | AR0130 (Mono) | 3.75μm | 1280x960 | ~$220 | Very popular entry mono cam; USB |
| ZWO ASI224MC | IMX224 (Color) | 3.75μm | 1304x976 | ~$250 | Great planetary cam; USB 3.0 |
| QHY5III462C | IMX462 (Color) | 2.9μm | 1920x1080 | ~$250–300 | Amazing low-light IR sensitivity |
| Arducam IMX462 (USB3) | IMX462 (Color) | 2.9μm | 2MP | ~$130–150 | ✅ CSI or USB3 option; great budget pick |
| Arducam IMX327 Mono USB | IMX327 (Mono) | 2.9μm | 2MP | ~$140–180 | ✅ Monochrome version, better for deep sky |
| ZWO ASI183MM Pro (cooled) | IMX183 (Mono) | 2.4μm | 20MP | ~$850 | High-res mono, small pixels though |
- 2.9μm pixels
- Amazing low-light sensitivity
- Works with Pi or PC
- Ideal for lunar, planetary, guiding
- Long exposures (~30s+) with tweaks
- ✅ Cheapest with real low-light power
- 2.9μm pixels, monochrome = higher sensitivity
- Great for deep-sky and filter imaging
- Works with Raspberry Pi, Linux, Windows
| Pixel Size | Sensitivity | Ideal Use |
|---|---|---|
| 2.9μm | Very good | General astronomy, planets, galaxies |
| 3.75μm | Better | Lower noise, entry deep-sky |
| ≥5μm | Excellent | Rare in budget class |
🔥 Arducam IMX327 Mono (USB)
Big 2.9μm pixels + monochrome = closest to pro-level results under $200 AUD.
Need help mounting it to a telescope or setting up software on Pi or PC (like PHD2 or Astroberry)? Just ask!
This guide explains how to mount a USB astronomy camera (e.g., Arducam IMX462/IMX327) to your telescope, capture images, and stack them into stunning deep sky or planetary photos.
- Astronomy camera (e.g., Arducam IMX327 or IMX462)
- Telescope with a focuser (e.g., Newtonian, Refractor, SCT)
- Adapter tube to fit your camera into the focuser
| Telescope Focuser Size | Adapter Needed |
|---|---|
| 1.25" | C-mount to 1.25" adapter |
| 2" | C-mount to 2" or use 1.25" reducer |
| T-thread (M42) | C-mount to T-thread adapter |
- Screw the adapter into the camera’s C-mount thread
- Insert into the focuser like an eyepiece
- Use a bright star (e.g., Vega) for focusing
- Use a Bahtinov mask for precise focus
Raspberry Pi:
- Install
libcameraorindidrivers - Use software:
-
KStars+Ekos AstroDMxoaCapture
-
Windows:
- Use SharpCap:
- Set exposure, gain, capture format (RAW/FITS/SER)
- Save multiple frames or videos
- Deep sky: 30–300 images @ 10–30s
- Planets: 500–2000 video frames (SER/AVI)
| Software | Platform | Notes |
|---|---|---|
| DeepSkyStacker | Windows | Free & easy stacking tool |
| Siril | All OS | Full pre/post processing |
| PixInsight | All OS | Pro-grade (paid) |
| Software | Platform | Notes |
|---|---|---|
| AutoStakkert! | Windows | Fast, accurate planetary stacking |
| RegiStax | Windows | Adds sharpening via wavelets |
| Siril | All | Also supports planetary stacking |
- Load light frames
- Add dark, bias, and flat frames
- Click Register checked pictures
- Then Stack checked pictures
- Save as TIFF or FITS
Use:
- GIMP, Photoshop, or Siril
- https://siril.org/
- Adjust curves, levels, color balance
- Use a tracking mount
- Take dark, bias, and flat frames
- Stack as many frames as possible
- Use monochrome cameras with filters for best sensitivity
| Step | What to Do |
|---|---|
| 1 | Mount camera with C-mount adapter |
| 2 | Connect to Pi or PC via USB |
| 3 | Focus using a bright star |
| 4 | Capture multiple images or video |
| 5 | Stack using DSS, Siril, or AutoStakkert |
| 6 | Post-process with GIMP or Siril |
Need help choosing filters, setting up Astroberry, or using INDI drivers on Pi? Just ask!