Battery supervision - SergeGit/rc-tank-platform GitHub Wiki
Battery Management System (BMS)
Key Improvements in the Battery Management System
- Moving Average Filter: Uses multiple readings to smooth out voltage fluctuations
- Auto Battery Type Detection: Automatically detects battery type based on voltage range
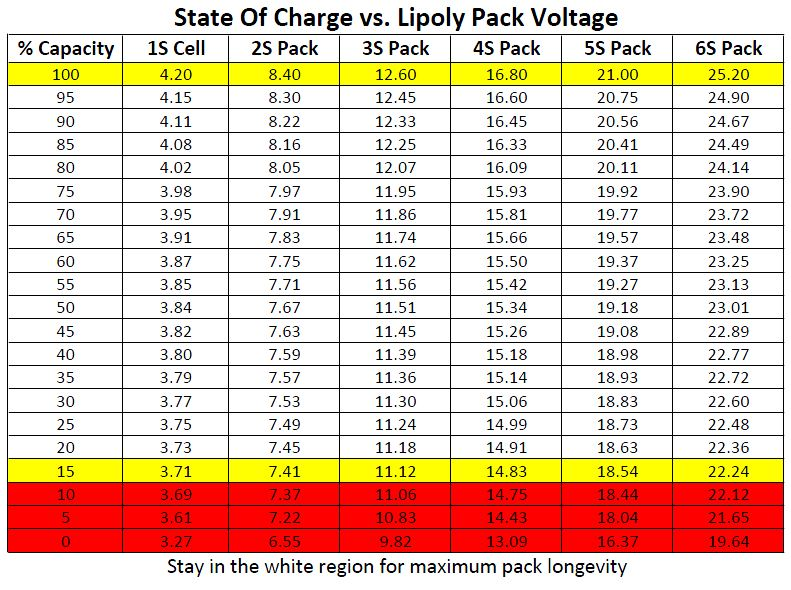
- Battery Percentage Calculation: Provides percentage remaining based on min/max voltage
- Hysteresis for Relay Control: Prevents relay chatter when voltage is near threshold
- Enhanced I2C Reporting: Reports more detailed battery information (voltage, type, percentage)
- Periodic Monitoring: Regularly checks battery voltage without blocking main loop
- Optimized Serial Output: Only logs changes to save bandwidth
This approach is like having a smart battery management system that not only protects your hardware but also provides useful information to both the local controller and the Raspberry Pi master. The system can now:
- Automatically detect the type of battery connected
- Provide accurate voltage and percentage readings
- Protect the system with low-voltage cutoff
- Resume operation when voltage recovers
- Share detailed battery status over I2C
hull of the tank houses the:
Battery control circuit
The circuitry consists of:
- Main battery (11.1V LiPo)
- Backup battery (7.2V NiMh)
- Battery voltage measurement
- Battery protection circuit
- Battery selection circuit
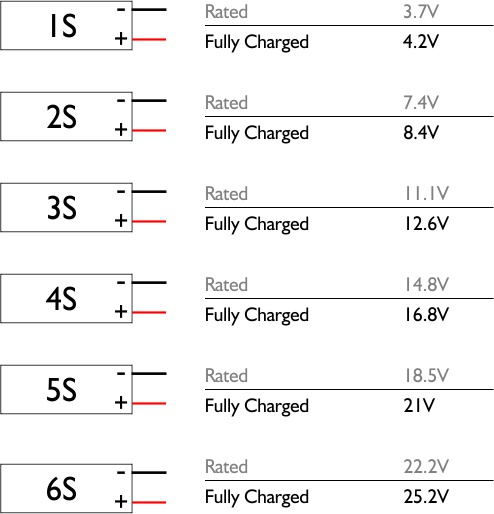
Battery specifications
The supply of the tank consists of a main battery for the main supply. In addition there is a backup supply in the form of a battery. The main battery can be switched off in low power mode.
| Battery Specifications: | Main | Backup |
|---|---|---|
| Type | LiPo | NIMH |
| Configuration | 2S1P | |
| Nominal Voltage | 7.4V | |
| Usable Voltage Range | 6.0 – 8.4V | |
| Capacity | 500mAh | |
| Max Discharge | 15C (7.5A) | |
| Internal Resistance | 0.14Ω |
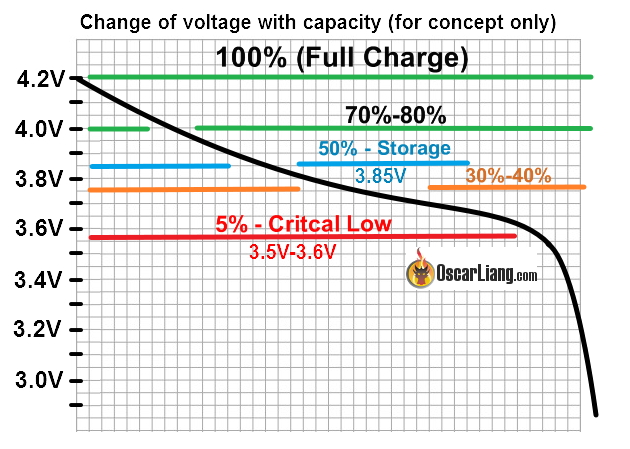
Discharge curve
Arduino
Pin assignment
// Configure Arduino pins
const int batteryMeasInput = A1; // Battery measurement on A1
const int relayOutput = A0; // Battery relay output pin on A0
// Parameters
float R1 = 100000.0; // resistance of R1 (100K - 99.2) -see text
float R2 = 21800.0; // resistance of R2 (22K - 21.90) - see text!
float v_ref = 5.30; // Maximum value for the analog pin (this can be measured between GND and +5V on arduino)
float vmin; // Battery information
float vset; // Battery information
float vmax; // Battery information
float v_tracks = 5.0; // Track motor max voltage
float v_turrets = 5.0; // Turret motor max voltage
Initialization setup
void setup_Battery_supply(){
// pinout battery control
pinMode(relayOutput, OUTPUT);
pinMode(batteryMeasInput, INPUT);
// Turn off relay - Initial state
RelayCtrl(false);
// Print begin message
Serial.println("--------------------");
Serial.println("DC VOLTMETER");
Serial.print("Maximum Voltage: ");
Serial.print((int)(v_ref / (R2 / (R1 + R2))));
Serial.println("V");
Serial.println("--------------------");
Serial.println("");
BatteryType(BatteryRead()); // first setup battery
}
Functions
Relay control - Open / close relay
void RelayCtrl(bool cmd){
if(cmd){
digitalWrite(relayOutput, HIGH); // Close relay
} else {
digitalWrite(relayOutput, LOW); // Open relay
}
}
Battery measurement - Measure battery voltage
// Voltage measurement on battery
float BatteryRead(){
float vin = (analogRead(batteryMeasInput) * v_ref) / 1024.0; // analog pin input voltage
float vbattery = vin / (R2 / (R1 + R2)); // calculated battery voltage
// battery disconnected
if (vin<0.09){
vbattery = 0.0; //statement to quash undesired reading
BatteryType(vbattery);
}
Serial.print("Vbat: ");
Serial.print(vbattery);
Serial.println("V");
return vbattery;
}
Battery check - Relay control base on battery voltage / Threshold to motors
// Battery check to control relay
void BatteryCheck(){
bool relaycmd;
float vbat = BatteryRead();
// relay control
if (vbat > vmin){
relaycmd = true;
}
else if(vbat <= vmin){
relaycmd = false;
}
RelayCtrl(relaycmd);
// refactor thresholds to battery voltage
if (abs(vset - vbat) > 0.5) {
vset = vbat;
if (relaycmd) {
turret_SpeedThreshold = round(v_turrets/(vbat)*255);
track_SpeedThreshold = round(v_tracks/(vbat)*255);
// battery voltage lower than minimum
if (turret_SpeedThreshold > 255){
turret_SpeedThreshold =255;
}
if (track_SpeedThreshold > 255){
track_SpeedThreshold =255;
}
}
else {
turret_SpeedThreshold = 0;
track_SpeedThreshold = 0;
}
Serial.print("TrackThreshold: ");
Serial.print(track_SpeedThreshold);
Serial.print("TurretThreshold: ");
Serial.print(turret_SpeedThreshold);
}
}
Battery type - Identification of battery connected
// Battery type
void BatteryType(float battery_voltage){
int battery_type = 0;
if(battery_voltage < 0.50){
battery_type = 0;
}
if(battery_voltage > 5.00){
battery_type = 1;
}
if(battery_voltage > 9.00){
battery_type = 2;
}
if(battery_voltage > 15.00){
battery_type = 3;
}
switch(battery_type){
case 0:
vmin = 0.0;
vset = 0.0;
vmax = 0.0;
Serial.println("Value 0 received");
Serial.println("No battery is connected");
break;
case 1:
vmin = 4.6; // vmin = 5.4V (0.9 V per cell)
vset = 7.2;
vmax = 8.2; // vmax = 8.2V
Serial.println("Value 1 received");
Serial.println("NIMH 7.2V is connected");
break;
case 2:
vmin = 6.8; // vmin = 9.6V, 3.2V per cell
vset = 11.1;
vmax = 12.6; // vmax = 12.6, 4.2V per cell
Serial.println("Value 2 received");
Serial.println("LiPo 3S 11.1V is connected");
break;
case 3:
vmin = 15.4; // vmin = 19.2V, 3.2V per cell
vset = 22.2;
vmax = 25.2; // vmax = 25.2, 4.2V per cell
Serial.println("Value 3 received");
Serial.println("LiPo 6S 22.2V is connected");
break;
default:
vmin = 0.0;
vset = 0.0;
vmax = 0.0;
Serial.println("Value outside 0,1,2,3 received");
break;
}
}
Loop
void loop(){
BatteryCheck(); //Check battery
}
Code
Battery_supervision.ino
/*******************************************************************************
THIS SOFTWARE IS PROVIDED IN AN "AS IS" CONDITION. NO WARRANTY AND SUPPORT
IS APPLICABLE TO THIS SOFTWARE IN ANY FORM. CYTRON TECHNOLOGIES SHALL NOT,
IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL OR CONSEQUENTIAL
DAMAGES, FOR ANY REASON WHATSOEVER.
********************************************************************************
DESCRIPTION:
This code is used for measuring a battery supply using a voltage divider.
The steps are:
* Measure DC voltage
* Detect battery type
* Based on SoC open/close battery relay
* Determine battery powersave mode
CONNECTIONS (Arduino nano v3 - Atmega328P, old bootloader):
Arduino A0 - Digital ouput relay battery
Arduino A1 - Measurement input resistive voltage divider
*******************************************************************************/
// Configure Arduino pins
const int batteryMeasInput = A1; // Battery measurement on A1
const int relayOutput = A0; // Battery relay output pin on A0
// Parameters
float R1 = 100000.0; // Resistance of R1 (100K - 99.2) - see text
float R2 = 21800.0; // Resistance of R2 (22K - 21.90) - see text
float v_ref = 5.30; // Maximum value for the analog pin (this can be measured between GND and +5V on arduino)
float vmin; // Battery information
float vset; // Battery information
float vmax;
//float v_tracks = 5.0; // Track motor max voltage
//float v_turrets = 5.0; // Turret motor max voltage
void setup_Battery_supply(){
pinMode(relayOutput, OUTPUT);
pinMode(batteryMeasInput, INPUT);
// Turn off relay - Initial state
RelayCtrl(false);
// Print start message
Serial.println("--------------------");
Serial.println("Voltage measurement");
Serial.print("Maximum Voltage: ");
Serial.print((int)(v_ref / (R2 / (R1 + R2))));
Serial.println("V");
Serial.println("--------------------");
Serial.println("");
BatteryType(BatteryRead()); // first setup battery
}
// Battery check to control relay
void BatteryCheck(){
bool relaycmd;
float vbat = BatteryRead();
// relay control
if (vbat > vmin){
relaycmd = true;
}
else if(vbat <= vmin){
relaycmd = false;
}
RelayCtrl(relaycmd);
// refactor thresholds to battery voltage
if (abs(vset - vbat) > 0.5) {
vset = vbat;
if (relaycmd) {
turret_SpeedThreshold = round(v_turrets/(vbat)*255);
track_SpeedThreshold = round(v_tracks/(vbat)*255);
// battery voltage lower than minimum
if (turret_SpeedThreshold > 255){
turret_SpeedThreshold =255;
}
if (track_SpeedThreshold > 255){
track_SpeedThreshold =255;
}
}
else {
turret_SpeedThreshold = 0;
track_SpeedThreshold = 0;
}
Serial.print("TrackThreshold: ");
Serial.print(track_SpeedThreshold);
Serial.print("TurretThreshold: ");
Serial.print(turret_SpeedThreshold);
}
}
// Voltage measurement on battery
float BatteryRead(){
float vin = (analogRead(batteryMeasInput) * v_ref) / 1024.0; // analog pin input voltage
float vbattery = vin / (R2 / (R1 + R2)); // calculated battery voltage
// battery disconnected
if (vin<0.09){
vbattery = 0.0; //statement to quash undesired reading
BatteryType(vbattery);
}
Serial.print("Vbat: ");
Serial.print(vbattery);
Serial.println("V");
return vbattery;
}
// Battery type
void BatteryType(float battery_voltage){
int battery_type = 0;
if(battery_voltage < 0.50){
battery_type = 0;
}
if(battery_voltage > 5.00){
battery_type = 1;
}
if(battery_voltage > 9.00){
battery_type = 2;
}
if(battery_voltage > 15.00){
battery_type = 3;
}
switch(battery_type){
case 0:
vmin = 0.0;
vset = 0.0;
vmax = 0.0;
Serial.println("Value 0 received");
Serial.println("No battery is connected");
break;
case 1:
vmin = 4.6; // vmin = 5.4V (0.9 V per cell)
vset = 7.2;
vmax = 8.2; // vmax = 8.2V
Serial.println("Value 1 received");
Serial.println("NIMH 7.2V is connected");
break;
case 2:
vmin = 6.8; // vmin = 9.6V, 3.2V per cell
vset = 11.1;
vmax = 12.6; // vmax = 12.6, 4.2V per cell
Serial.println("Value 2 received");
Serial.println("LiPo 3S 11.1V is connected");
break;
case 3:
vmin = 15.4; // vmin = 19.2V, 3.2V per cell
vset = 22.2;
vmax = 25.2; // vmax = 25.2, 4.2V per cell
Serial.println("Value 3 received");
Serial.println("LiPo 6S 22.2V is connected");
break;
default:
vmin = 0.0;
vset = 0.0;
vmax = 0.0;
Serial.println("Value outside 0,1,2,3 received");
break;
}
}
// Relay control of battery
void RelayCtrl(bool cmd){
if(cmd){
digitalWrite(relayOutput, HIGH); // Close relay
} else {
digitalWrite(relayOutput, LOW); // Open relay
}
}
Test code
Battery_Test.ino
/*******************************************************************************
THIS SOFTWARE IS PROVIDED IN AN "AS IS" CONDITION. NO WARRANTY AND SUPPORT
IS APPLICABLE TO THIS SOFTWARE IN ANY FORM. CYTRON TECHNOLOGIES SHALL NOT,
IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL OR CONSEQUENTIAL
DAMAGES, FOR ANY REASON WHATSOEVER.
********************************************************************************
DESCRIPTION:
This is the test code for testing the Battery supervision function.
The function shows how to set up the initial battery supply and use the functions monitoring.
**Please note that the battery voltage is assumed 11.1V**
CONNECTIONS (Arduino nano v3 - Atmega328P, old bootloader):
*******************************************************************************/
// parameters
// Initialisation
void setup() {
Serial.begin(9600);
setup_batterySupply(); // Setting up initial battery connected
}
void loop() {
char byte = 0;
// press q to cancel and exit
while (byte != 'z') {
Serial.readBytes(&byte, 1);
// BATTERY CHECK
// -----------------------------------
BatteryCheck(); //Check battery voltage continuously
BatteryRead();
}
Serial.print("Done \n");
Serial.end();
}