6.VIRTUAL IMPLEMENTATION - S-Division-2022-2023-Odd/Repo-01 GitHub Wiki
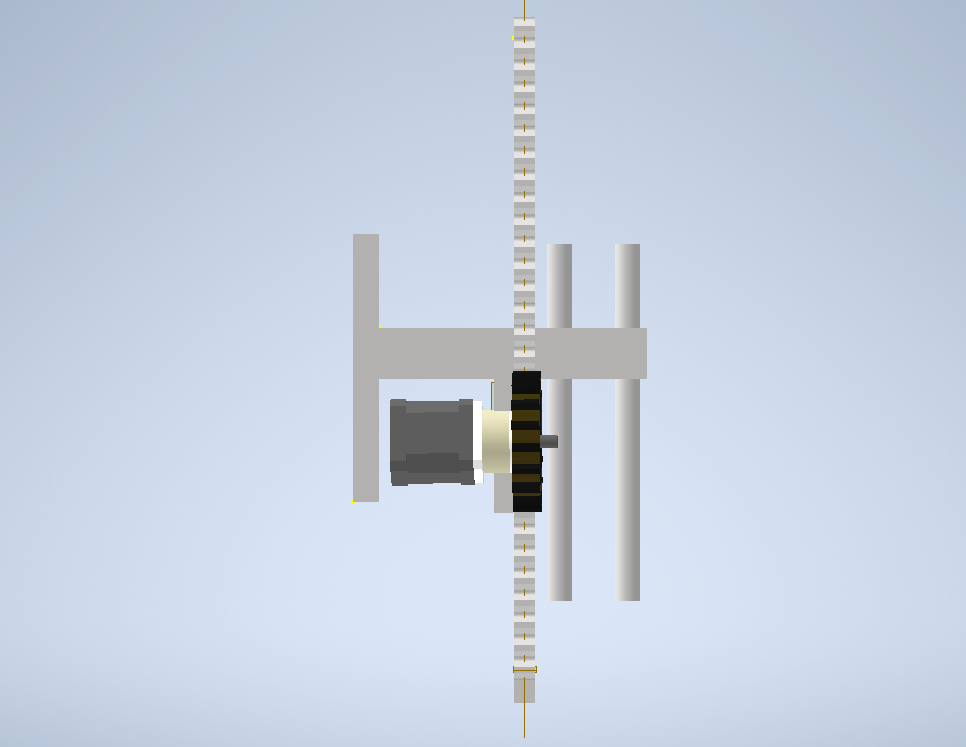
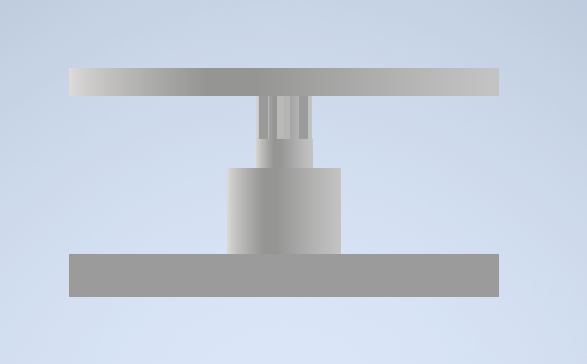
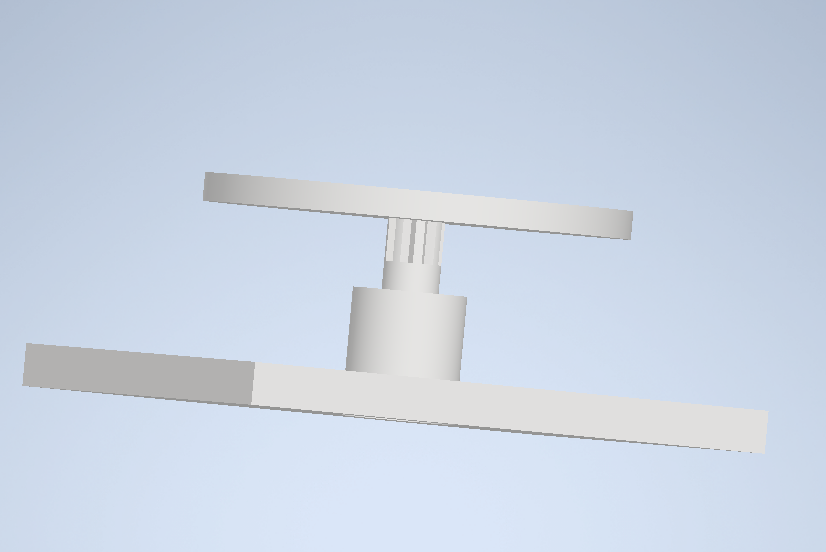
6.1 3D MODELING
DRAWING UNIT




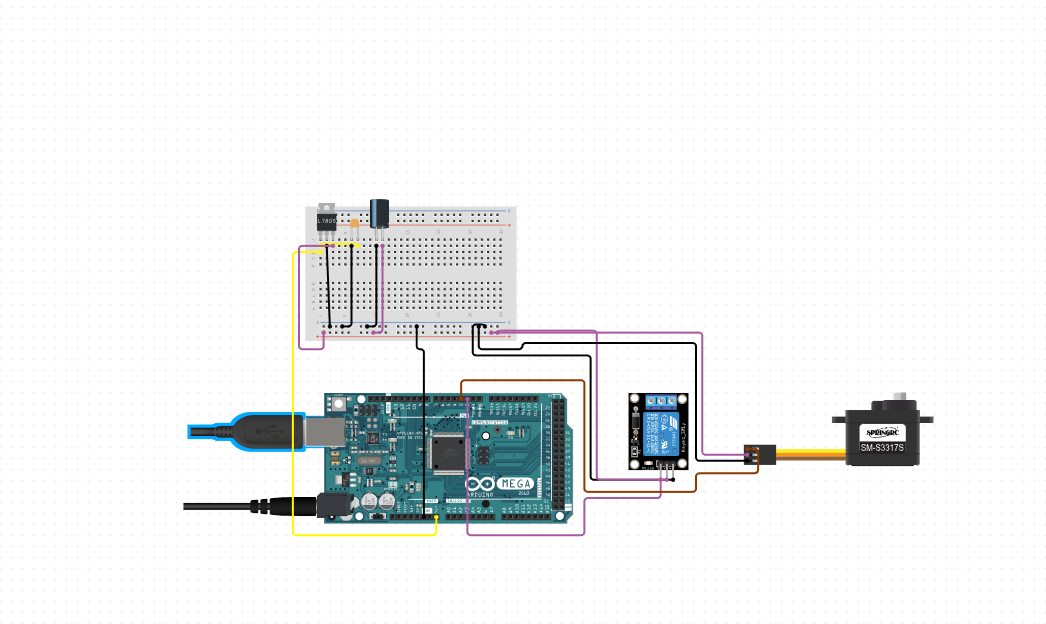
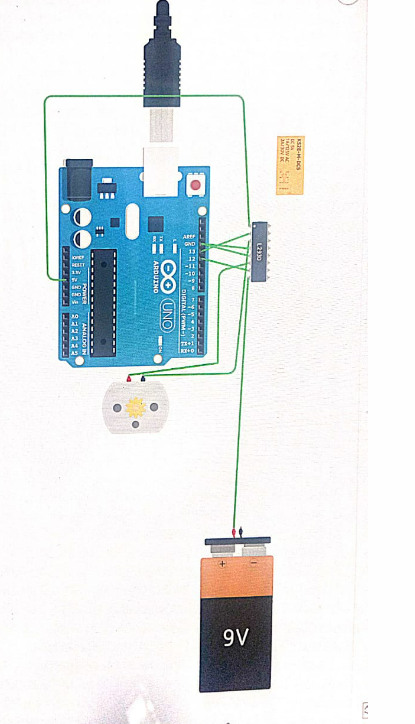
6.2 CIRCUIT DIAGRAM

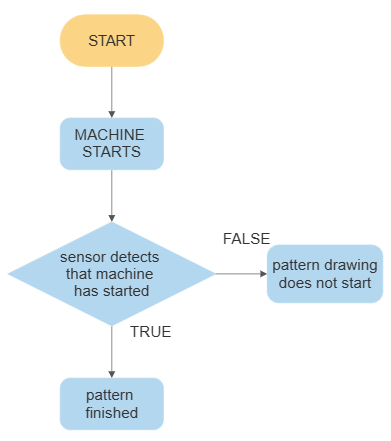
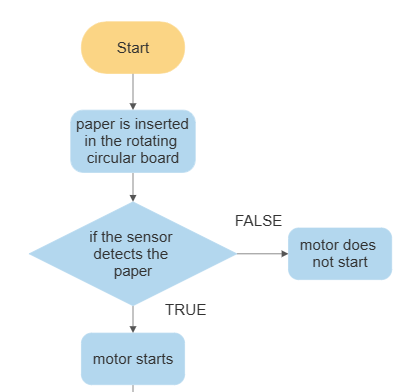
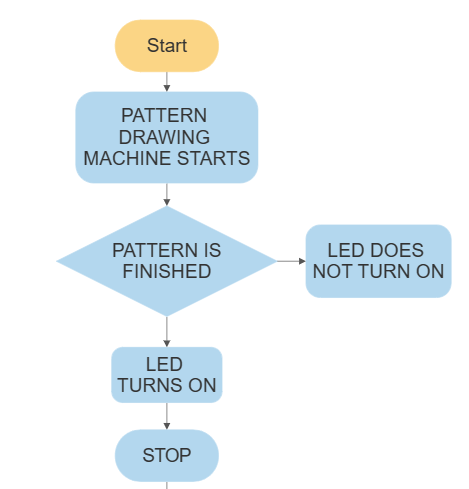
6.3 FLOW CHART

6.4 BILLS OF MATERIALS (BOM)
| SL NO | COMPONENT | QUANTITY | DESCRIPTION | COST |
|---|---|---|---|---|
| 1 | FOAM SHEET | 1 | (15x15x10)mm | - |
| 2 | AURDINO MEGA 2560 | 1 | - | 1350 |
| 3 | RELAY | 1 | - | 150 |
| 4 | RACK AND PINION | 1 | (180x12X15)mm | 180 |
| 5 | STEPPER MOTOR | 1 | - | 170 |
| 6 | JUMPER WIRES | 20 | MALE TO MALE,FEMALE TO FEMALE,FEMALE TO MALE | 100 |
| 7 | L CLAMPS | 6 | 1/2 inches | - |
| 8 | NUTS AND BOLTS | 13,6,3&3 | (20X3)mm,(4x25)mm,(100x4)mm&(75x3)mm | - |
| 9 | AL-C CHANNEL | 1 | (15X15X12)mm | - |
| SL NO | COMPONENT | DESCRIPTION | QUANTITY | COST |
|---|---|---|---|---|
| 1 | ACRYLIC SHEET | (18x18x3)mm | 1 | - |
| 2 | DC MOTOR | 12v | 1 | 120 |
| 3 | FOAM SHEET | (300x300x12)mm | 1 | - |
| 4 | PAPER HOLDING CLIPS | - | 6 | 20 |
| 5 | ARDUINO MEGA 2560 | - | 1 | 1350 |
| 6 | JUMPER WIRES | MALE TO MALE,FEMALE TO FEMALE,MALE TO FEMALE | 20 | 100 |
| SL NO | COMPONENT | QUANTITY | DESCRIPTION | COST |
|---|---|---|---|---|
| 1 | LED LIGHTS | 2 | Red and Green | 10 |
| 2 | ARDUINO MEGA 2560 | 1 | - | 1350 |
| 3 | JUMPER WIRES | 20 | MALE TO MALE,FEMALE TO MALE,FEMALE TO FEMALE | 100 |
| 4 | BREADBOARD | 1 | 55 mm x 85 mm x 10 mm | 100 |
| 5 | IR SENSOR | 1 | - | 300 |
| SI NO | MATERIAL | QUANTITY | DESCRIPTION | COST |
|---|---|---|---|---|
| 1 | FOAM SHEET | 2 | (300x300x12)mm,(15x15x10)mm | - |
| 2 | AURDINO MEGA 2560 | 1 | - | 1350 |
| 3 | RELAY | 1 | - | 150 |
| 4 | RACK AND PINION | 1 | (180x12X15)mm | 180 |
| 5 | L CLAMPS | 6 | 1/2 inches | - |
| 6 | AL-C CHANNEL | 1 | (15X15X12)mm | - |
| 7 | STEPPER MOTOR | 1 | - | 170 |
| 8 | JUMPER WIRES | 50 | MALE TO MALE, FEMALE TO MALE , FEMALE TO FEMALE,FEMALE TO MALE | - |
| 10 | ACRYLIC SHEET | 2 | 120mm X150mm, 10mm THICKNESS | |
| 11 | DC MOTOR | 2 | 12V | 240 |
| 12 | PAPER HOLDING CLIPS | 6 | - | 20 |
| 14 | LED LIGHT | 2 | RED AND GREEN | 10 |
| 15 | BREAD BOARD | 1 | 55mm x 85mm x 10mm | 100 |
| 16 | IR SENSOR | 1 | - | 300 |
| 17 | NUTS AND BOLTS | 13,6,3&3 | (20X3)mm,(4x25)mm,(100x4)mm&(75x3)mm | - |
6.5 MECHANISMS AND RESOURCE SPECIFICATIONS
MOTOR SIZING 1 DC motor is required for our course project
Torque = F * r (In N-m) (SI UNIT) where F- Force acting on the body r- Lever arm length T- Torque
Volume=V=68.550x10^-6 m^3 (IN SI UNIT)
m=mass=(64.437 x 10^-3)kg (IN SI UNIT)
g= acceleration due to gravity (9.81 m/s^2)
F=mg= (0.6443) (AS PER NEWTON'S SECOND LAW OF MOTION)
T= 1.95 Kg- cm T is approximately equal to 2 Kg-cm
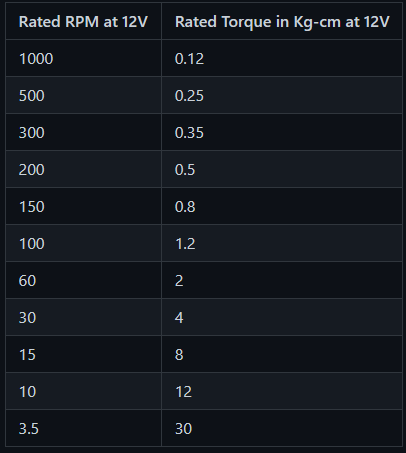
HENCE WE REQUIRE A DC MOTOR OF 60 RPM
BATTERY SIZING
| SL NO | COMPONENT | QUANTITY | OPERATING VOLTAGE | OPERATING CURRENT OF EACH COMPONENT | TOTAL CURRENT |
|---|---|---|---|---|---|
| 1 | DC GEARED MOTORS | 1 | 12 V | 300 mA | 300 X 1 =300mA |
| 2 | AURDINO MEGA 2560 | 1 | 5 V | 100 mA | 100 X 1 = 100mA |
| 3 | LED LIGHTS | 2 | 3.6 V | 30 mA | 30 X 2 = 60mA |
Total current = Quantity X operating current of each component 1 mA = 10^-3 A 300 mA = 0.3 A 100 mA= 0.1 A 30 mA = 0.03 A 60 mA = 0.06 A
FACTOR OF SAFETY = 3