Cobot's Safety - RoBorregos/smart-factory GitHub Wiki
Cobot's Safety
Overview
Actual state
The connections are investigated, they are continue in progress. As well, the workspace of the robot arms has been defined, to prevent accidents or failures in the system.
Functionality
The main propose of this circuit is the connections of the safety module of the PLC of the Cobot
Stop Emergeny PL d, e / SIL 2, 3
Hardware
| Component | N.° | Reference | Not3 |
|---|---|---|---|
| CPU 1215FC DC/DC/RLY | 1 | 6ES7215-1HF40-0XB0 | From FW4.2 |
| SM 1226 F-DI8 / 16xDC24V | 1 | 6ES7226-6BA32-0XB0 | |
| SM 1226 F-DQ 4xDC24V | 1 | 6ES7 226-6DA32-0XB0 | |
| Encapsulated pushbutton (NO) | 1 | 3SU1100-0AB40-1BA0 | Green, conexion by screw |
| Encapsulated pushbutton (NO) | 1 | 3SU1100-0AB40-1BA0 | Blue, conexion by screw |
| Encapsulated pushbuttono (NC) | 1 | 3SU1100-0AB20-1CA0 | Red, conexion by screw |
| E-button (NC) | 1 | 3SU1100-1HB20-1CF0 | |
| 2 NC pE-button | 1 | 3SU1400-1AA10-1CA0 | |
| Conectors | 2 | 3RT2015-2BB42 |
Software
| Component | N.° | Reference | Note |
|---|---|---|---|
| TEP 7 Basic V15 | 1 | 6ES7822-0AA05-0YA5 | or well, STEP 7 Professional V15 |
| STEP 7 Safety Basic | 1 | 6ES7833-1FB15-0YA5 | Or well, STEP 7 Safety |
| V15 | Advanced V15 |
Wiring

Flow diagram

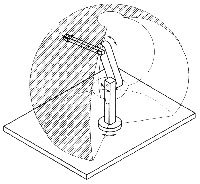
xArm 6
The workspace of each arm has been determined and limited to prevent accidents or failures in the system. The original reach of each xArm is around 70 cm. Nevertheless, if extended to that distance, the DashGo would lose balance, and not move as normally. We had to change the workspace of each xArm. We did that, by creating a virtual sphere around each arm, that has a radius of maximum 50 cm, so that the reach now becomes this one, preventing the DashGo unbalance and other possible accidents. By using a sphere as a workspace for the arms, each arm will know if the coordinates sent to them, are reachable or not, giving back an error message in case they are not.
Additional modifications and improvements
The follow step, is connect everything and make test. For the robotic arms, the next step would be to restrain specific positions that even with the new workspace, would unbalance the robot.
Reference and support links
Manual Safety PLC siemens 1200
Arms Workspace analysis
Robot Workspace Structure