Arduino_Notes - RicoJia/notes GitHub Wiki
========================================================================
========================================================================
-
CPU, RAM (2k SRAM, DRAM?), IO, ROM
-
DRAM is "dynamic RAM". Reading: when cap is full, it will leak in a few milliseconds.. So set word to on, bit to 1v, if cap is 2v (full), it will flow from cap to bit; else if it's 0v, it will flow the other way. Write: read, empty the cap, then write.

-
SRAM is for static RAM, faster, using flip-flops (CMOS), no need to fresh. So faster. Used as cache, because it's big in size, and can't fit as much in a chip as DRAM.
-
-
Bootloader: software to wait for your program and write to arduino. bootloading is to use an In-System-Programmer (ISP), real hardware
- Arduino may not have a bootloader on it. So replace it with a new chip
- get 2k more space.
- But you can't use USB
- select port
-
Baudrate: 9600 bits/second in serial. above 76800. then cable needs to be short
-
software reset arduino:
void (*reset)(void) = 0; // set this function at address 0 reset(); // HOWEVER, if you print right before reset, serial print might be corrupted
-
Arduino print number:
Serial.print(78, DEC) gives "78"-
Serial.println(String(execution_time));print byte - WARNING:
serial.printlnwill send stuff to serial
-
-
Problem with
delete[]- Try not to delete[] arrays, there are certain complications that we don't find answers for yet.
-
- Choose DOIT DEVKIT v1
-
Modes
- 活动模式:在这种模式下,Wi-Fi和蓝牙发射器和接收器的所有部分都是活动的。在这种情况下,电流消耗在80和260mA之间。
- 调制解调器睡眠模式:处理器仍处于活动状态,但Wi-Fi和蓝牙已禁用。在这种情况下,电流消耗在3到20mA之间。
- 轻度睡眠模式:主处理器停止工作,但RTC单元和ULP处理器单元仍处于活动状态。电流消耗约为0.8 mA。
- 深度睡眠模式:只有RTC单元处于活动状态。在这种情况下,Wi-Fi和蓝牙通信的数据存储在RTC的存储器中。在此模式下,电流消耗在10到150μA之间。
- 休眠模式:除了用于时钟的RTC定时器和连接到RTC的一些I / O引脚外,所有单元均被禁用。 RTC定时器或连接的引脚可以将芯片从此状态唤醒。在这种情况下,电流消耗约为2.5μA。
-
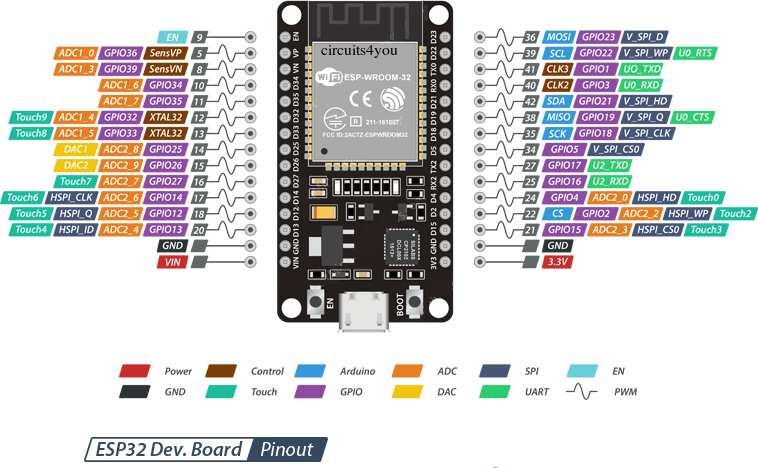
About ESP32
-
Datasheet
- RTC_GPIO is for low-power mode
- PWM channel generates a PWM.
- vin is 5v!
-
~means PWM. - D for dual core. ours is dual core. MIFA antenna, F shaped antenna, high bandwidth per area
- has internal LED
- also has IR comm
- Power: 5-12v external power
- SPI flash: spi has choose line, but still slow for memory.
-
Datasheet
-
Communications
- HTTP, run post and get, but HTTP is quite tricky
- WebSocket: persistent HTTP calls
- MQTT, iot protocals, light weight, industry standard
========================================================================
========================================================================
- serial comm (tx->rx). Should use
<SoftwareSerial.h>since there's one tx, rx, and they clash with the comm - default pwd: 1234
-
Sample Schematic:

========================================================================
========================================================================
-
ros serial: getting started
-
Note: as indicated here, for groovy and above, installing ros_lib is a one-time thing:
cd sketch_book/libraries rosrun rosserial_arduino make_libraries.py . -
Note: ros and serial (like uploading) will clash
-
generate msgs see here:
# in ros package rosrun rosserial_client make_libraries ~/sketchbook/libraries- Note: catkin_make doesn't delete the old srv file (just overwrites it). So need to delete build and devel if old srv file was generated
-
How to write service see here
-
run the node
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 -
A logic error in arduino will make the rosserial topic drop msg.
-
-
print float:
char result[32]; // Buffer big enough for 7-character float dtostrf(commanded_angles[i], 6,2, result); nh.loginfo(result);
-
Subscribe: array in
.msgis tricky. List them out instead- when you reach above 90% memory, the arduino will become spooky
-
publish: array, string needs to have length specified first. Also, you have to use ptr for deserialization. link
joint_msg.commanded_angles_length = 6; joint_msg.commanded_angles = ¤t_angles[0]; joint_msg_pub.publish(&joint_msg); nh.loginfo("hehe"); nh.spinOnce();