6.VIRTUAL IMPLEMENTATION - Q-Div-2022-2023-Odd/Repo-1 GitHub Wiki
RANGOLI PEN

Rod

Base

 22-be96-b60edc7e5546.png)
22-be96-b60edc7e5546.png)
Assembled
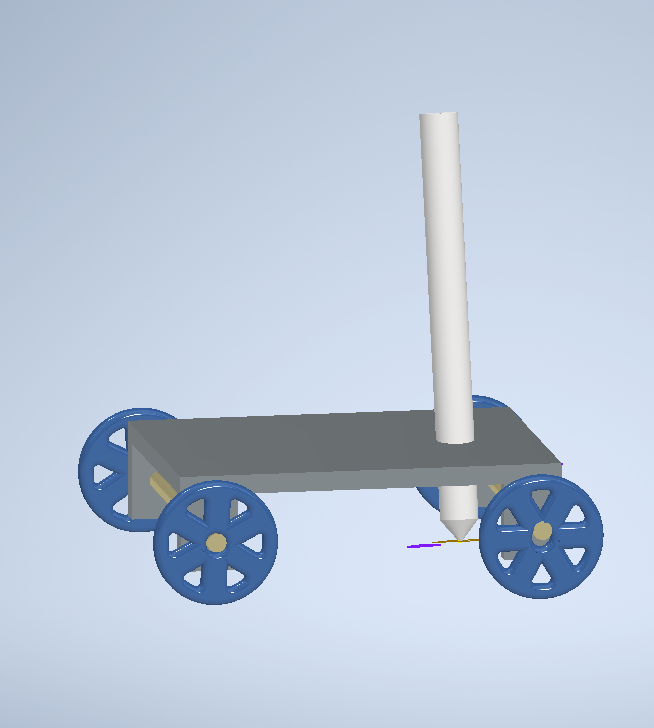 model
model

| SL NO | PART NAME | MATERIAL WITH WHICH PART IS MADE OF | DESCRIPTION ON ABOUT | QUANTITY REQUIRED |
|---|---|---|---|---|
| 1 | Servo motor | - | 90 degree | 1 |
| 2 | DC motor | - | 60 rpm | 2 |
| 3 | Rangoli pen | plastic | 1 | |
| 4 | Wheels | 12mm diameter | 4 | |
| 5 | Screws | 12mm with 24 bolts | 12 | |
| 6 | Screw slots | 4 | ||
| 7 | Small screw | 12mm diameter with 10 bolts | 8 | |
| 8 | Battery | 9V | 2 | |
| 19 | Arduino Mega | 1 |

Total mass calculation
Density of foam sheet= 25*10^-6 kg/cm^3
Density of rubber= 1.52*10^-3 kg/cubic cm
Volume of base= 252 cubic cm
Mass 1=volume of basedensity of foam sheet=2522510^-6 kg/cm^3=0.0063 kg/cm^3 Mass 2=rubber volumedensity of rubber= 4(6.5*1.38)=0.0358kg
Mass of dc motor=2*0.09=0.18kg Mass of batteries=(for 12v)+(for 5v)=0.5+0.045=0.545kg
Total mass of the bot=0.347+0.0358+0.18+0.545=1.1078kg
FORCE CALCULATION: F=mg F=1.1078*9.81=10.8564N
TORQUE CALCULATION: T=(F*D)/2
Diameter of wheel=10.5cm
T=(10.85610.5)/2 0.85=48.4449 N-cm
1 N-cm=9.8kg-Cm
T=48.4449/9.8=4.9433Kg-cm
Total torque=TFOS=4.9433*1.5=7.4150 Kg-cm
We are using 2 motor torque =7.4150/2=3.7075 kg-cm(approx)= 30rpm
| sl no | components | operating voltage | maximum current | |
|---|---|---|---|---|
| 1 | 2 DC motor | 12 v | 1300mA | |
| 2 | 1 arduino mega | 12v | 100mA | |
| 3 | 1 IR sensor | 5v | 40mA |