DFX800相机搭建指南 - Open3DV/Xema GitHub Wiki
DFX800相机搭建指南
1、硬件架构

2、硬件安装
Jetson nano系统配置
系统已经安装了cuda,但是没有把cuda的路径加入到.bashrc
打开.bashrc,在最后加入:
export CUDA_HOME=/usr/local/cuda
export LD_LIBRARY_PATH=${CUDA_HOME}/lib64:${LD_LIBRARY_PATH}
export PATH=${CUDA_HOME}/bin:${PATH}
运行 source .bashrc
将Galaxy_Linux-armhf_Gige-U3_32bits-64bits_1.3.1911.9271.tar.gz文件拷贝至jetson nano 解压:
tar -xvf Galaxy_Linux-armhf_Gige-U3_32bits-64bits_1.3.1911.9271.tar.gz
下载并编译相机firmware:
git clone https://github.com/Open3DV/OpenCam3D
cd OpenCam3D/firmware
mkdir build
cmake ..
make
配置开启启动项:
sudo vim /etc/rc.local
(要保证文件的第一行是 #!/bin/bash)
在末尾添加:
cd ~/OpenCam3D/firmware/build
./camera_server &
保存之后需要更改属性为可执行文件
sudo chmod +x /etc/rc.local
IIC信号线
| PIN | 信号 |
|---|---|
| 1 | GND |
| 2 | SDA |
| 3 | SCL |

相机触发线
| 颜色 | 光机端 | 相机端 |
|---|---|---|
| 黑 | GND (Pin 5) | GND (Pin 2) |
| 蓝 | Trigger Out 2 (Pin 1) | Line 2 (Pin 5) |



以太网连接线


水晶头一侧为568B
从左到右的顺序为:白橙、橙、白绿、蓝、白蓝、绿、白棕、棕


8pin端子侧: 1.白橙; 2.橙; 3.白绿; 4.绿; 5.白棕; 6.棕; 7.白蓝; 8.蓝
电源线连接


3、软件配置
3.1、条纹图案生成
运行tools中的create_patterns.py,会在patterns文件夹中生成42幅条纹图案,如图2-1所示:其中垂直正弦条纹18幅、水平正弦条纹18幅、灰度图6幅。正弦条纹配置表如patterns.csv所示,将条纹图按照表中顺序烧写进3010中。需设置参数如表5-1所示,参数设置如图2-2所示:
表5-1
| 项目 | 参数 | 备注 |
|---|---|---|
| Illumination | B | |
| Pre-Exposure Dark Time(us) | 540 | |
| Exposure Time(us) | 11000 | |
| Post-Exposure Dark Time(us) | 1000 | |
| Trigger Out 2 Delay(us) | -500 |
图2-1

图2-2

3.2系统对焦
3.2.1 投影仪对焦
投影仪对焦流程:
1、用usb线接连DLP3010至计算机;
2、打开DLP3010LC软件,设置投影出一幅图案
3、调节光机镜头对焦环使投影的图案在500mm平面处最清晰。
3.2.2 相机对焦 相机对焦流程:
1、将相机USB线连接至计算机;
2、打开大恒相机软件Daheng Galaxy Viewer,连接相机,开始采集图像;
3、调节相机镜头对焦环使光机投影出来的图案在相机中清晰成像;
3.3系统标定
系统标定流程:
1、准备一块标定板如图2-3所示,标定板特征点数为11*9,点间距为10mm。
2、在cmd窗口中运行DF8.exe,可看到命令提示,如图2-4所示,在DF8.exe同目录下创建文件夹capture_data/calib。
3、将标定板放置在距离投影仪500mm的位置,运行标定条纹图案获取命令:DF8.exe --get-raw02 --ip 192.168.x.x --path .\capture_data\calib\data_00,获取一组标定条纹图案,如图2-5所示。
4、在400mm-600mm的距离,投影范围内,变换标定板位姿,运行命令:DF8.exe --get-raw02 --ip 192.168.x.x --path .\capture_data\calib\data_01,获取第二组标定条纹图案。
重复3操作20次以上,采集足够多的标定条纹图案,如图2-6。
5、运行DF8_Calibrate.exe自动进行相机标定,标定耗时几分钟,标定完成后,会在当前文件夹中生成标定结果文件param.txt。
6、运行命令:.\DF8.exe --set-calib-param --ip 192.168.x.x--path .\param将标定结果写进相机,如图2-7所示。
图2-3

图2-4

图2-5
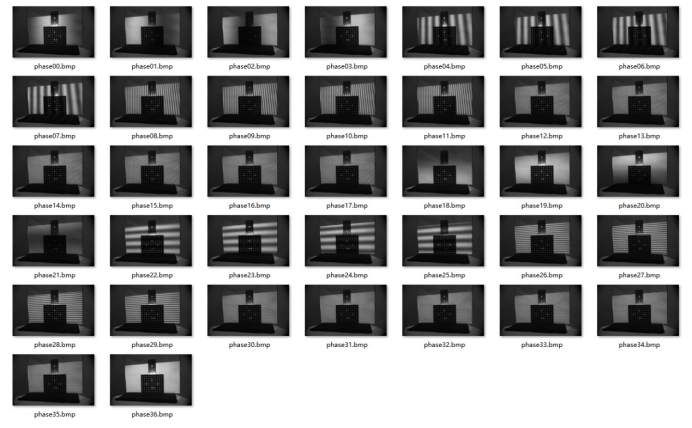
图2-6

图2-7

3.4 采集点云
3.4.1命令行获取点云
运行命令:.\DF8.exe --get-frame03 --ip 192.168.x.x --path .\capture\frame_00 获取一帧点云数据,如图2-8所示,一帧数据有三个文件组成如图2-9所示,其中.bmp为亮度图、.tiff为深度图、.xyz为点云数据如图2-10所示。
图2-8

图2-9

图2-10

3.4.2软件获取点云
运行程序DF8_Gui.exe如图2-11所示;采集数据流程如下所示:
连接:连接相机。
单帧:采集一帧数据。
另存为:默认以当前时间命名,保存结果信息如图2-12所示。
图2-11

图2-12
