2. Concept Generation and Selected concept - O-Division-2020-2021-Even/Repo-11 GitHub Wiki
2.1 List of Functions
Table 1: List of all identified functions
| SL.No | Functions from User Perspective | Functions from Designer perspective |
|---|---|---|
| 1. | User commands for initiation | Accept the commands |
| Display the output | ||
| Confirm the commands | ||
| Start the bot | ||
| 2. | Select the desired pattern | Display the list of patterns |
| Selection of standard patterns | ||
| Indicate the pattern selected | ||
| 3. | Draw the selected patterns | Place the paper before drawing |
| Draw the pattern on the surface | ||
| 4. | Handling of Pen/Marker | Hold the pen/markers |
| Remove the pen/markers for different colors | ||
| Change the marker after it's ink is empty | ||
| 5. | Control and move the bot on the surface | Accepting the commands from the user |
| Controlling the movement of marker | ||
| 6. | Termination of process | Indicate completion of drawing |
| Request for termination | ||
| Accept the command | ||
| Switch off the bot |
2.2 Function Tree
Chart 1: Function Tree

2.3 Morphological Chart
Chart 2: Morphological Chart
| Sl.No | Sub-Functions | Means 1 | Means 2 | Means 3 | Means 4 |
|---|---|---|---|---|---|
| 1. | Accept Commands |  LCD Screen with IR Remote LCD Screen with IR Remote |
 Wireless control Wireless control |
 Voice commands Voice commands |
 Touch Sensor Touch Sensor |
| 2. | Motion Control |  Stepper Motor Stepper Motor |
 DC Motor DC Motor |
 Servo Motor Servo Motor |
 BLDC Motor BLDC Motor |
| 3. | Movement of Bot |  Wheels Wheels |
 Linear Actuators and belt drive Linear Actuators and belt drive |
 Robotic Arm Robotic Arm |
 Hybrid Hybrid |
| 4. | Hold the pen/markers |  Mechanical Arm Mechanical Arm |
 Robotic Clamp Robotic Clamp |
 Edge Clamp Edge Clamp |
|
| 5. | Switch on/off |  Push Button Push Button |
 SPST SPST |
 Toggle Switch Toggle Switch |
 IR Remote IR Remote |
| 6. | Display list of patterns |  Mobile Apps Mobile Apps |
 LCD Screen LCD Screen |
 LED lights LED lights |
 LED Screen LED Screen |
| 7. | Indicate Completion of drawing | LED Screen |
 Speaker Speaker |
 Buzzer Buzzer |
 LED bulbs LED bulbs |
| 8. | Pattern Drawing Mechanism |  Linkage Mechanism Linkage Mechanism |
 XY Plotter Mechanism XY Plotter Mechanism |
 Gear and Chain Mechanism Gear and Chain Mechanism |
 Robotic arm Mechanism Robotic arm Mechanism |
2.4 Conceptual Designs
Concept 1:

Concept 2:
.png)
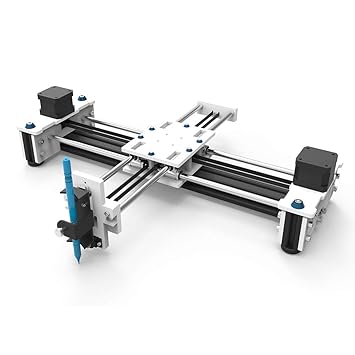
Concept 3:

Concept 4:

Concept Selection
2.5 Weightage of Each Objective
Table 2: Weightage given to each objective identified in problem definition
| Sl.no | Objectives | Weightage |
|---|---|---|
| 1. | Bot should be semi-automatic | 9 |
| 2. | Pattern drawn should be permanent | 3 |
| 3. | Bot should be portable | 7 |
| 4. | Bot should be able to draw all standard shapes | 8 |
| 5. | Bot should draw designs on a sheet of paper | 2 |
| 6. | Bot should be user-friendly | 6 |
2.6 PUGH Chart
Chart 2: PUGH Chart

2.7 Justification for the Scores Given
Table 3: Justification for the scores given in the pugh chart with respect to the objectives and concepts
| SL.No | Concept number | Objective | Score Allocated | Justification for the score |
|---|---|---|---|---|
| 1. | Concept 1 | Bot should be semi-automatic | Datum | --------------------------------------------------------------- |
| Pattern drawn should be permanent | Datum | --------------------------------------------------------------- | ||
| Bot should be portable | Datum | --------------------------------------------------------------- | ||
| Bot should be able to draw all standard shapes | Datum | --------------------------------------------------------------- | ||
| Bot should draw designs on a sheet of paper | Datum | --------------------------------------------------------------- | ||
| Bot should be user-friendly | Datum | --------------------------------------------------------------- | ||
| 2. | Concept 2 | Bot should be semi-automatic | +9 | Bot is semi automatic and it receives orders through voice messages |
| Pattern drawn should be permanent | 0 | By using the mechanical arm the pen is well gripped and is permanent | ||
| Bot should be portable | -7 | there is no proper means for portability | ||
| Bot should be able to draw all standard shapes | -8 | Due to less mobility bot may be able to draw only few shapes. | ||
| Bot should draw designs on a sheet of paper | +2 | A sheet of paper can be placed and the bot can perform the required operations | ||
| Bot should be user-friendly | +6 | Bot has a simple structure and is easy to use | ||
| 3. | Concept 3 | Bot should be semi-automatic | +18 | There is a wireless control by means of ir remote and also programming, hence the bot is semi-automatic |
| Pattern drawn should be permanent | 0 | By means of permanent markers that can easily be held by the clamp | ||
| Bot should be portable | 0 | The bot is portable | ||
| Bot should be able to draw all standard shapes | +8 | Because of programming we can give input and hence the bot can draw various standard shapes | ||
| Bot should draw designs on a sheet of paper | +2 | A sheet of paper is placed below the marker and hence pattern can be drawn | ||
| Bot should be user-friendly | +6 | As the bot is not that complex, it is user-friendly | ||
| 4. | Concept 4 | Bot should be semi-automatic | +18 | By wireless control and by means of a program and software, the bot has manual as well as automate control while drawing patterns |
| Pattern drawn should be permanent | 0 | By means of permanent markers that can easily be held by the edge clamp and has flexible motion | ||
| Bot should be portable | -14 | An issue of portability due to complex circuit may prove to be a problem while transporting or carrying | ||
| Bot should be able to draw all standard shapes | +8 | By means of the code and software, we can install the standard shapes and the mechanism will be able to comply to the command and draw the pattern | ||
| Bot should draw designs on a sheet of paper | +2 | A sheet of paper can be placed and the bot can perform the required operations on the medium comfortably | ||
| Bot should be user-friendly | -6 | The complex design and implementation may prove to be an issue for the user and may not be used for its defined purpose |
2.8 Selected Design
Concept 3: