Decentralized Control - NeLy-EPFL/cobar-miniproject-2023 GitHub Wiki
This week, we will learn how a simple biologically inspired controller can support locomotion. The readings will guide you through the basic concepts of decentralized control. In class, we will provide a short introduction to these concepts. Exercises using the Neuromechanical model introduced in the readings will reinforce the concept of decentralized control.
Cruse et al (2007) "Insect walking is based on a decentralized architecture revealing a simple and robust controller"
Neveln et al (2019) "Information-based centralization of locomotion in animals and robots." Nature Communications
Here we define 'decentralized control' as that taking coordinated using local information like limb position (e.g., stance versus swing) and limb sensory feedback. To illustrate this concept, we will present a series of examples. Lastly, to give some future perspectives, we will touch upon how this concept of decentralized control can be mathematically formalized using information theory.
Evolution has driven the emergence of different locomotor strategies across species. It has been hypothesized that the degree to which an animal uses decentralized (versus centralized, CPG-based) control depends on its ecological terrain, behavioral characertistics (e.g., speed), and limb morphology. Two exemplars in insects are stick insects (likely more decentralized) versus cockroaches (likely more centralized).
"Carausius morosus has evolved to walk in complex, unpredictable environments including the branches of vegetation. This requires precise leg placement at a rather slow speed A.Ayali et al".
Evidence for independent leg stepping modules has been identified through experiments on the stick insect. For example, when one leg of the insect is coupled to a slower treadmill than the other five legs, it has been observed that the stepping rhythm can be different across legs. Notably, although this uncoupled leg could be oscillating at a higher or lower frequency, it maintained some coordination with the other legs: Bässler et al(see Figure 1).
Additional experiments on crayfish and stick insects, H.Cruse hypothesized that decentralized locomotion could emerge from six partially independent leg controllers. Specifically, using a set of six rules applied to neighboring legs, arthropods might coordinate their stepping pattern to generate forward locomotion. These rules are the subject of this week's tutorial. The rules are as follows:

Example of rule based controller
The investigators were able to build a robust controller using these rules (Walknet). Thus, in principle sensory signals used to retrieve the state of the leg can give rise to effective decentralized control. However, for the animal, it remains unclear if this information is processed centrally (i.e., more centralized than expected).

Fig. 1 - Separated legs oscillate at a lower frequency when on a slower treadmill but remain coordinated
By contrast with the stick insect. It is thought that rapid walking in cockroaches requires more centralized control: "The American cockroach, Periplaneta americana, is adept at rapid running on planar surfaces (the floor of the tropical rainforest or that of your kitchen), regardless of details of the terrain A. Ayali et al.".
Like most insects, the cockroach's preferred fastest gait is the tripod gait. In principle, this can be generated using central pattern generators (CPGs) (see next week's tutorial) which are considered feedforward (rather than decentralized or rule-based). Strong evidence for this is derived by performing a simple calculation of the delay in sensory feedback and muscle responses. At high locomotor velocities (up to 20 cm/s) these are too slow to mediate a decentralized / rule-based control Sponberg et al..
Example advantages:
- Robustness/Redundancy: Decentralized control makes the system more robust against failure of a single component.
- Adaptability/Flexibility: Each component can adapt to local constraints (e.g., one leg is stepping on slippery terrain).
- Modularity: Decentralized control makes it easy to add additional components to a control system without modifying other components.
Example disadvantages:
- Slower: Decentralized control might be slower due to increased computational overhead.
- Harder to implement: Decentralized control might be harder to implement than centralized control due to the increased complexity of the system and the need for coordination between components.
As described above, rule-based (decentralized) control was effective in generating locomotion in Walknet, a biologically-inspired simulated insect. Thus, we will be focusing on those rules for the mini-project. Nevertheless, the exploration of decentralized control extends beyond locomotor control. The following section can inform your understanding of decentralization versus centralization globally. However, they extend beyond today's tutorial.
Coupled oscillators are characterized by their intrinsic frequency and coupling strengths. Viewing coupled oscillators from a centralization perspective is interesting. Their position on the centralized/decentralized spectrum depends on the strength of the coupling. In cases where the coupling is weak and local, they can be considered as a more decentralized architecture. In cases where the coupling is strong and global, they are considered to be a centralized system. The transition from one to another can be described as the moment when global influences outweigh local influences. This consideration is further elaborated on in the optional paper and in the following section.
As we have seen through the previous examples, the concept of centralization is not as straightforward as expected. There are many misleading shortcuts that should not be taken. To address this issue, a very useful formalism and measure of centralization has been developed through information theory.
"What unifies concepts of centralization is the amount of information a control signal shares about the global state of the system compared to the amount shared with the local state is greater for more centralized systems than the amount shared with the local state" I. Neveln et al summarizes the point of this review well. Figure 3B provides a good summary of the centralization metric they developed. We are interested in whether the control mechanism is rather centralized or decentralized. To determine this, one can compute the mutual information between the control and the local or global states (local state could be the kinematics of a leg and global state could be the average kinematics of all legs).
These quantities, IL and IG, are actually composed of four quantities: IUG, the global unique mutual information; IUL, the local unique mutual information; IR, the redundant information in local and global states about the control; and ISYN, the synergistic mutual information (something we only get when we know both global and local states). While IL and IG are easy to compute, the exact decomposition is hard to compute. By defining ICENT = IG - IL and ICO = IG + IL - ITOT, we can evaluate the centrality and redundancy of a system. Simplifying the equation, we get ICENT = IUG - IUL and ICO = IR - ISYN. A positive ICENT value indicates a centralized system, while a positive ICO value indicates a redundant system.
To determine whether a system is decentralized, one should ask the question, "Knowing the control signal, do I learn more about the local or the global state of the system?"
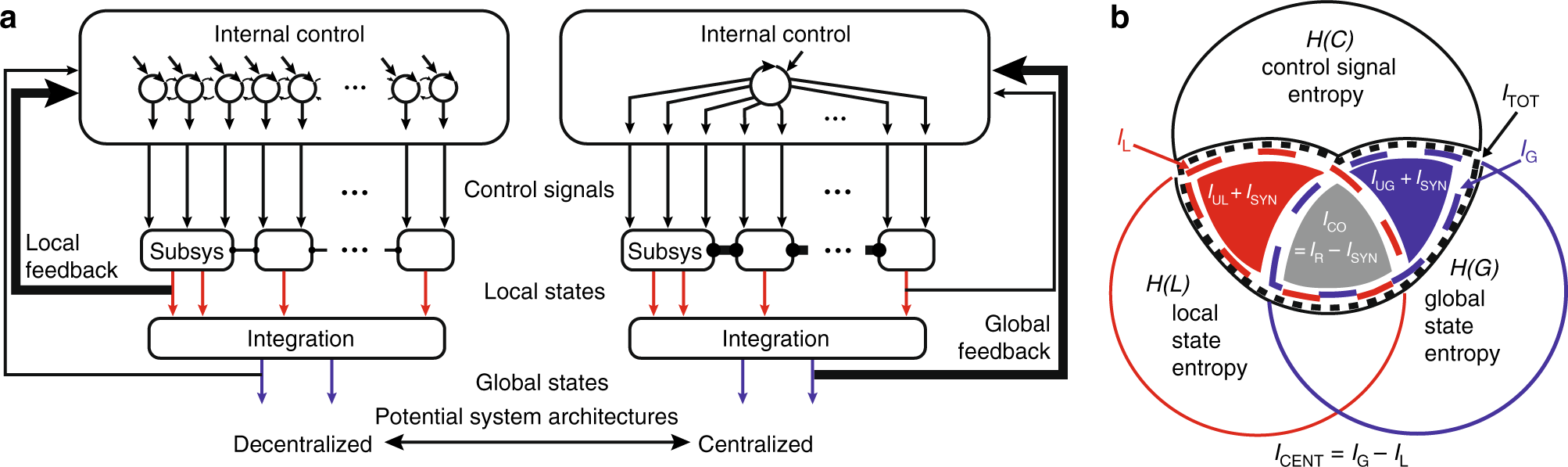
Fig.3 - Centralized and Decentralized Architecture and Centralization Metric
In this tutorial, you will learn how to use a decentralized controller to generate locomotion over flat terrain. The tutorial will provide you with a solid understanding of the basic principles of decentralized control and how it can be used to achieve robust and flexible locomotion.
Your ultimate goal will be to build a more advanced decentralized controller that can navigate over complex terrain.
Tutorial: decentralized control over basic terrain
Your task: decentralized control over complex terrain