4. CONCEPT GENERATION - N-division-2021-2022-even/Repo-16 GitHub Wiki
4.1 ESTABLISHING FUNCTIONS
| SI NO | Functions from User Perspective | Functions from Designer perspective |
|---|---|---|
| 1 | Carry load from one end of the rope to other end | Balancing on the rope while carrying the load |
| 2 | Bot should move on the rope. | Holding the load |
| 3 | Gripping the rope properly | Move in the horizontal direction |
| 4 | Stop when there is an obstacle ahead | |
| 5 | Obstacle Detection |
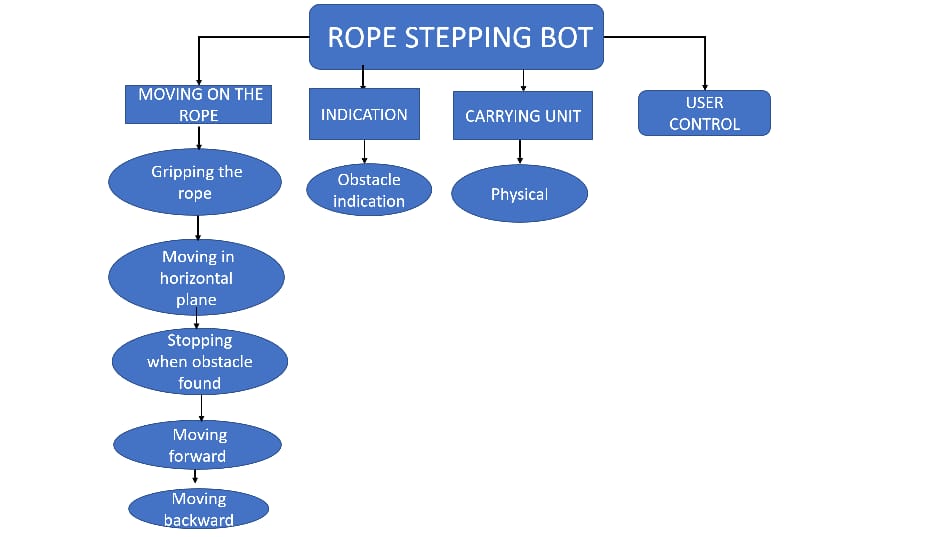
4.2 FUNCTION TREE
4.3 MORPHOLOGICAL CHART
| SI NO | Sub-functions | Means 1 | Means 2 | Means 3 | Means 4 |
|---|---|---|---|---|---|
| 1 | Gripping the rope | Self-locking grippers | Rope clamp | Roller | Wheels |
| 2 | Unloading | Conveyor belt(1100 miniature conveyor belt) | Rack & Pinion Mechanism | Robotic Arm | Physically(Hand) |
| 3 | Carrying the load | Hook | Container | Robotic arm | |
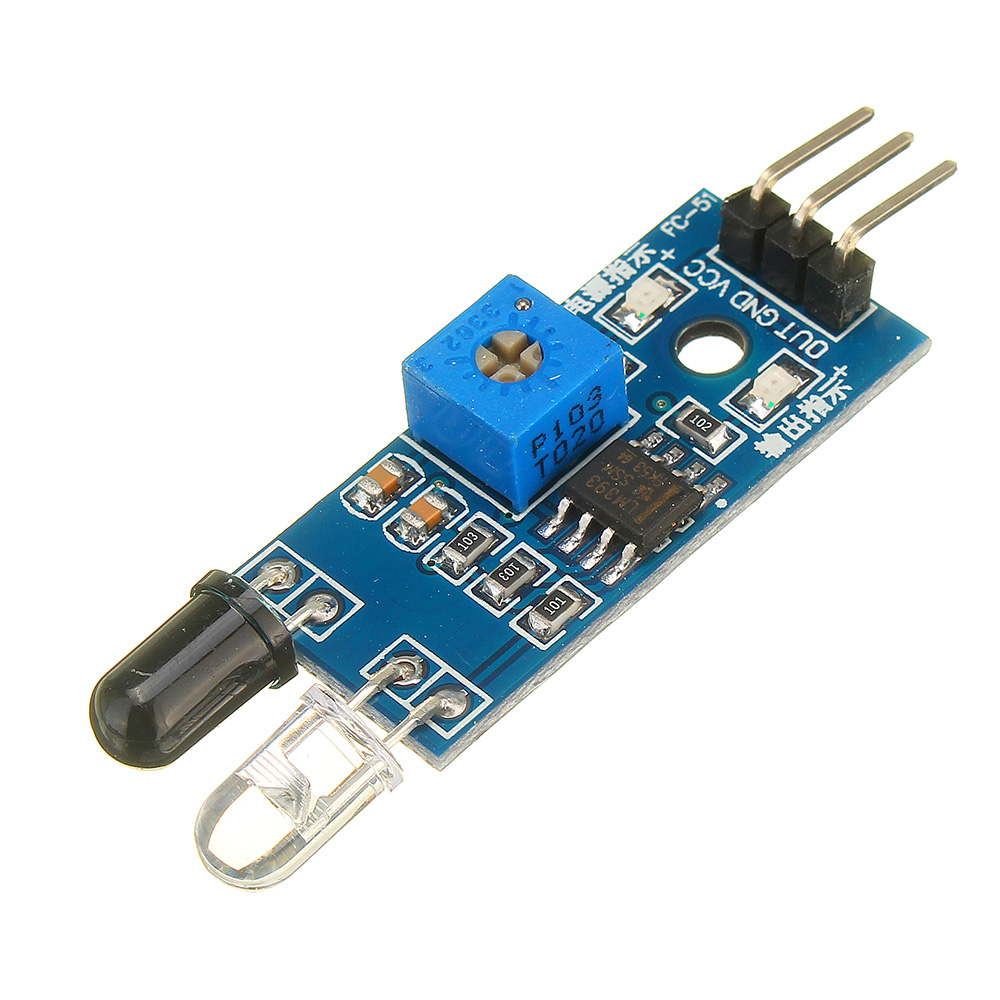
| 4 | Obstacle detection | Sonar sensor | IR Obstacle sensors | Proximity sensor | Ultrasonic sensor |
| SI NO | Sub-function | Means-1 | Means-2 | Means-3 | Means-4 |
|---|---|---|---|---|---|
| 1 | Gripping the rope |  |
 |
 |
 |
| 2 | Unloading |  |
 |
 |
|
| 3 | Carrying the load |  |
 |
|
|
| 4 | Obstacle detection |  |
 |
 |
 |
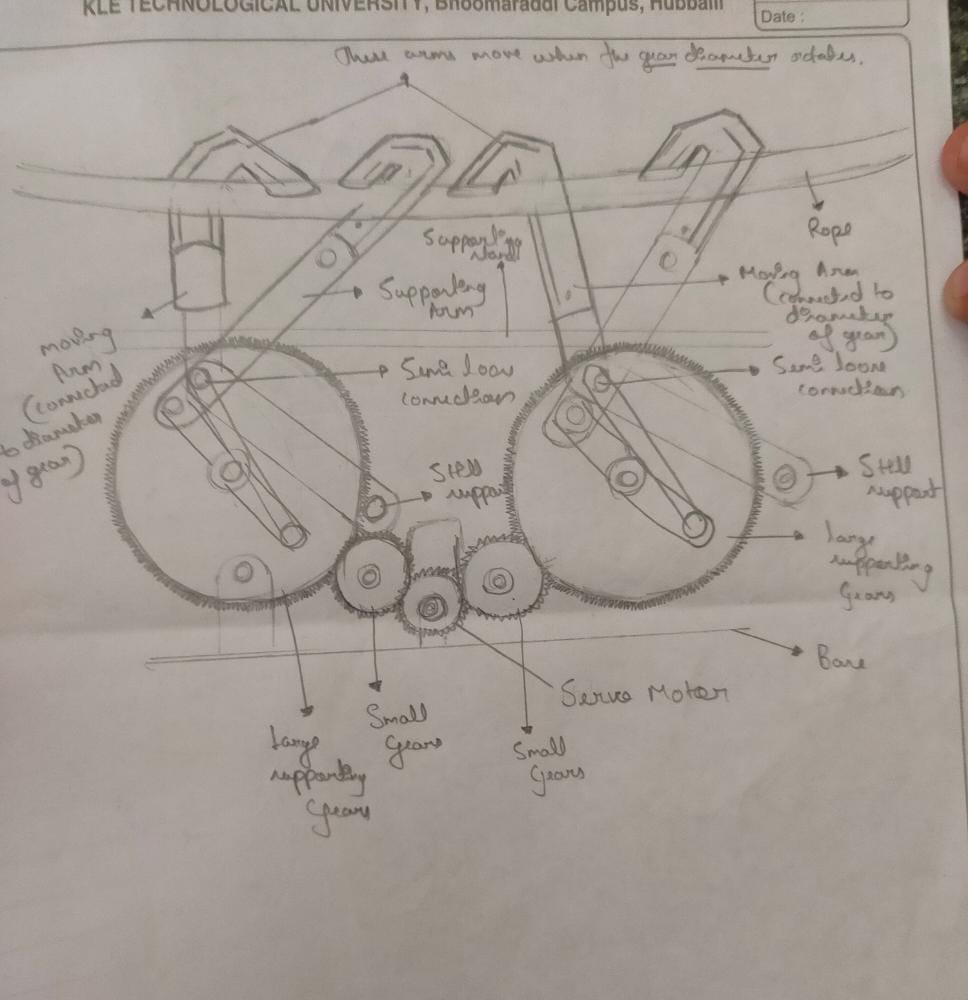
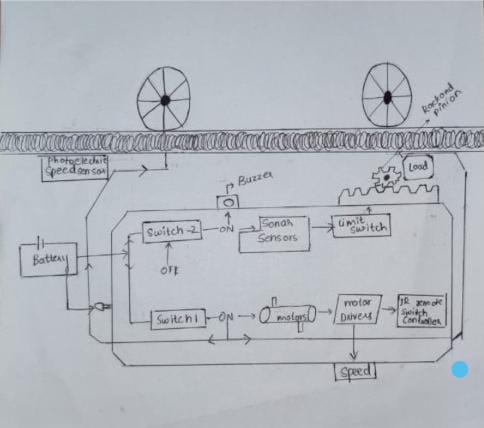
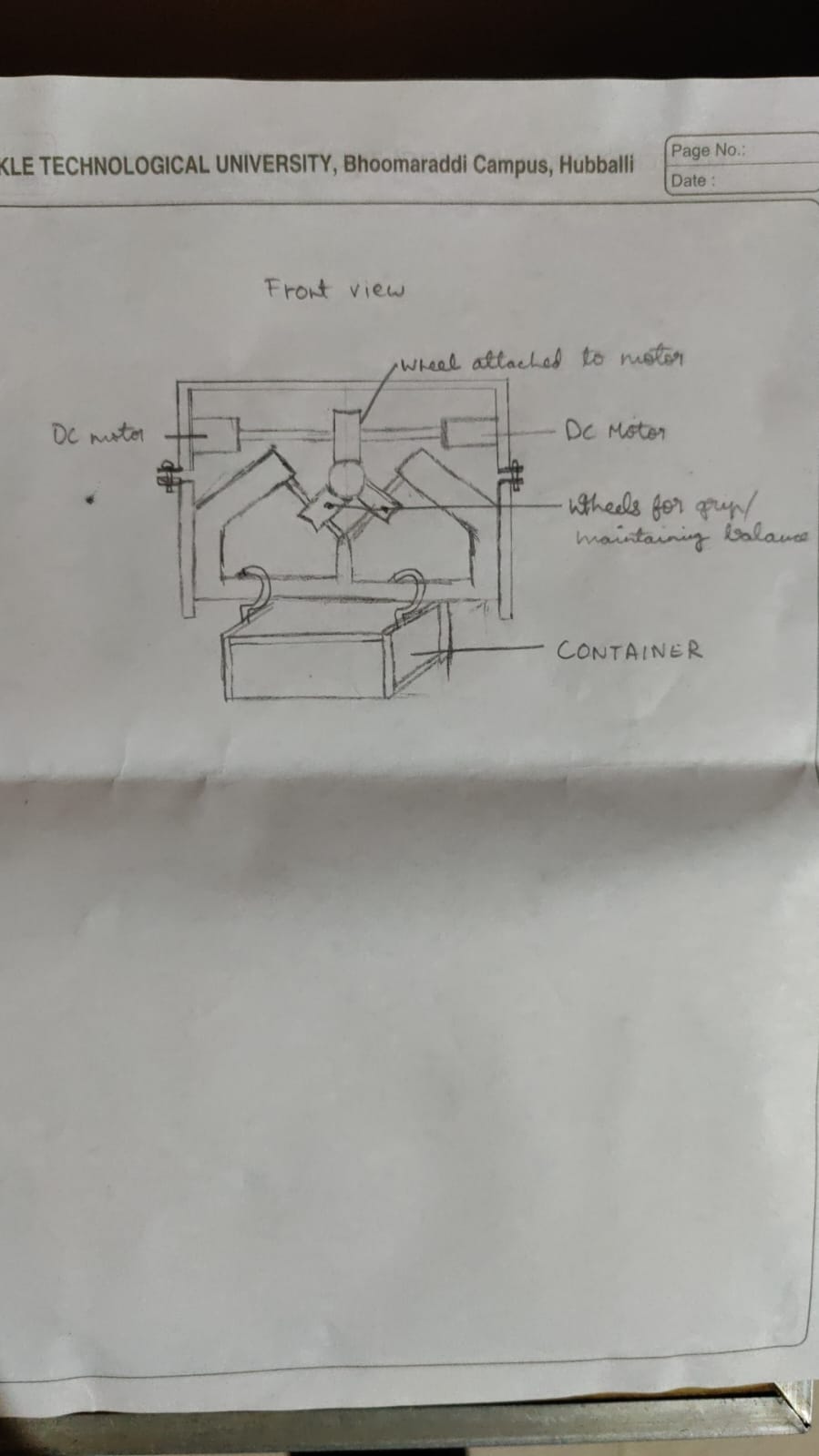
4.4 GENERATED CONCEPTS
JAIRAJ
VRASHABH
HARSHA

VIJAY