| 1 |
Rope Climbing Robot with Surveillance Capability |
Moves from one place to another place with carrying load |
Micro Controller,DC Motor dropping,IR Sensors,RF Modules,Relays,BatteryThree Toy Servos,Arduino Nano,Connecting Wires,Battery |
The robot has the ability to perform surveillance using a camera mounted on top of the robot. The quality of the Transmitted video from the camera to the computer is clear and stable. Hence the developed robot is a good choice for surveillance purposes. In addition, it can be used to traverse floors of a building. It uses an IR sensor to sense strips attached at each floor. Once the strips are sensed, a dropping mechanism is activated in which a specific object is dropped to the targeted floor or location. The robot can work in automatic mode or manual through RF signals from an RF transmitter. But this robot is not so cost effective as it requires use of expensive HD cameras, and other sensors. |
http://www.mecs-press.org/ijisa/ijisa-v5-n9/IJISA-V5-N9-1.pdf |
 |
| 2 |
ME112 Sloth robot project |
Moves from bottom to top of the tree |
Micro Controller,DC Motor dropping,IR Sensors,RF Modules,Relays,Battery |
The robot uses a pair of identical four bar mechanisms, with 180º phase shift. The robot has two inverted L-shaped legs on the front side and a supporting pulley on the rear, using these it traverses across the rope. Hence, the design structure and complexity is less than the four-legged robots. Kinematic modeling is done using “Linkage” software and the desired coupler curve is obtained after simulation. The robot's mechanism is built using customized acrylic linkages and the body by using foam board. The input crank in the four bar mechanism is driven by a geared DC motor. The Robot’s movement is controlled wirelessly by TX2/RX2 radio frequency module |
https://www.youtube.com/watch?v=rBT2Zo-PL0w&t=543s |
 |
| 3 |
Rope stepping bot |
Moves from one place to another place with carrying load |
30 RPM DC motor,Servo motor,Arduion uno |
Design and fabrication of wheeled pole climbing robot with high payload capacity:consist 3D motor is used as it has high torque and is easy to control,less rpm which is enough for gripping poles or pipes.the robot structure is made up of aluminium.pole climbing robot was specially designed to detect internal steel fractures with suspension bridges.the moving wheel of the cable climbing robot will be attached to surface of the cable by vacuum suction it consists of one driving trolley and two driven trolleys. |
https://www.researchgate.net/publication/327781968_Design_and_fabrication_of_wheeled_pole_climbing_robot_with_high_payload_capacity |
 |
| 4 |
Rope stepping bot |
Moves from one place to another place with carrying load |
Valves,Pumps,Circuit board |
Four legged walking robot that dosent need any eletronics.it requires a steady source of pressurized air for all operations including its controls and motion system.This robot is regulated by a light weight ,made up of pipes and light valves.it can move in response to commands or signals it senses from the surroundings.the robot is outfitted with three valves operating as inverters.it the 4 legs consist of 3 degrees of freedom pushed by three muscles,combined with cylindrical containers and bellows when container is pressurised limb turns in reverse direction.light wave changes the direction of revolution of limbs in clock and anti clockwise.the switch consists of 2 inputs and 4 outputs.therefore every input consists of 2 identical outputs. |
https://robologiclab.com/walking-robot-that-doesnt-need-any-electronics |
 |
| 5 |
Rope stepping bot |
Moves from one place to another place with carrying load |
Rope,Foam sheets,Compartment,Clampers,End bar,Sliders,Crank ,Connecting rods,Screws,Spanars,Nuts and bolts,Screw drivers,Glue gun,Soldring gun,Double shaft DC motors,Microcontroller PIC16F877A,Servo Motors (Metallic gears),Hand drill dc motors,LEDs,DC Supply 5V,DC Supply 12V |
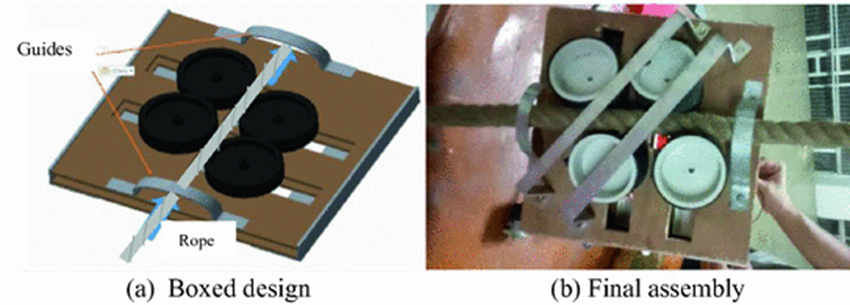
This project introduces a new and effective approach for rope climbing robot.In This robot, only 1 DC motor and 2 servo motors are needed for the major task,which is the climbing operation.This System, in general, is easy to build and to control. The system had been used for rope climbing competition for robotic competition and the result in the competition was encouraging.This Presented robot design used a total of 20 seconds to accomplish both task 1 and task 2. In the future,some studies on possible improvement such as adding PID controller to the control system, could be done in order to preserve the stability of the robot mechanism apart from increasing the linear with high speed performance in the rope climbing operation |
https://www.researchgate.net/publication/257725374_Piston_Mechanism_Based_Rope_Climbing_Robot |
 |
| 6 |
Rope stepping bot |
Moves from one place to another place with carrying load |
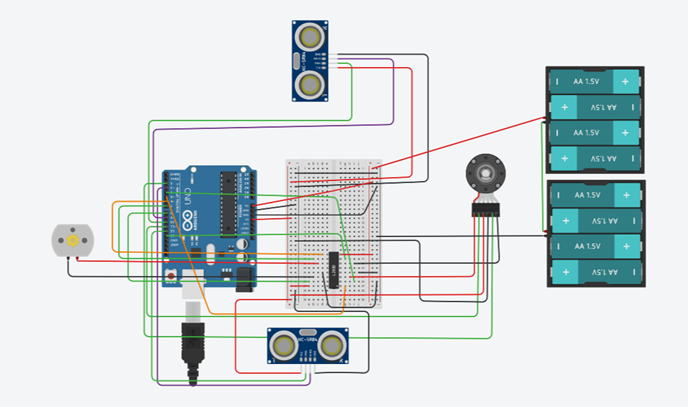
Sliding roller,Encoder motor assembly,Slider assembly,Motor wheel assembly,Screws,Foam sheets,Spanars,Nuts and bolts,Screw drivers,Drilling machine,Soldering gun,Glue gun,Arduino Uno,DC motors,Ultrasonic distance sensors,Encoder,L298n motor controller,Battery,Connecting wires and jumpers,Li-Po Battery 12 V,Double shaft dc motors,Servo motors |
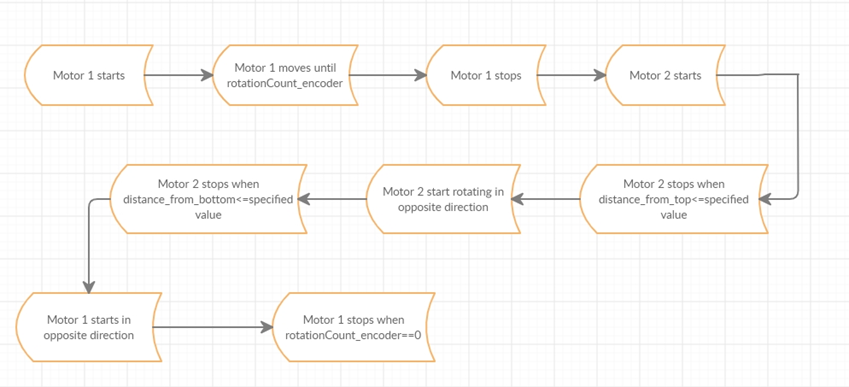
Robot is planned to serve the following tasks:1. It can be used to carry weights or to drop weights from some height.2.When equipped with camera, the robot can be used for surveillance.3.When equipped with cleaners, it can be used to clean glasses of windows or walls.Robot can be used to take pictures or to make videos from different heights. |
https://github.com/marsiitr/Rope-Climbing-Robot |
 |
| 7 |
Rope stepping bot |
Moves from one place to another place with carrying load |
Wheels,Springs & other things like Alluminium required for the building model,12V DC Lithium Polymer Reachargable Battaery,Microcontroller(Arduino Uno),DC Motor,PS3Controller,Motor drive |
The robots moving on a rope are an interesting domain with research potential and various applications.The rope climbing robot uses wheels powered by the DC motors for climbing the vertical rope.It can traverse horizontal ropes as well.The springs attached to the wheels are used for passive clinging of the robot to the rope.The stiffness of the spring was calculated on the basis of the payload and the motion capabilities of the robot. The proposed design gives two degrees of freedom (DOF) to the robot,i.e.translation and rotation about the rope. The power required for climbing at differeninclinationsisreported.Thedesignproposedhereislowcost,easy to build,and control.USES:It can be useful for surveillance purposes, for delivering help in disaster situations, inspection of cable suspension bridges,power plant chimneys,and cooling towers. |
https://www.researchgate.net/publication/327287370_Design_and_Analysis_of_Spring-Based_Rope_Climbing_Robot_Proceedings_of_iNaCoMM_2017 |
 |
| 8 |
Rope stepping bot |
Moves from one place to another place with carrying load |
Remote Control,Mechanical Charges,Battery,Camera,MiscellaneousMicro,Controller,DC Motor dropping,DC Motor (Porsc),IR Sensors,RF Modules,Decoders,Relays |
In this paper we have developed a robot capable of rope climbing in both horizontal and vertical direction.Furthermore the robot has the ability to perform surveillance using a camera mounted on top of the robot.The quality of the transmitted video from the camera to the computer is clear and stable.Hence the developed robot is a good choice for surveillance purposes.In addition it can be used to traverse floors of a building.It uses an IR sensor to sense strips attached at each floor. Once the strips are sensed,a dropping mechanism is activated in which a specific object is dropped to the targeted floor or location.The robot can work in automatic mode or manual through RFsignals from an RFtransmitter.Finally the robot is cost effective compared to many other developed robots for rope climbing. |
http://www.mecs-press.org/ijisa/ijisa-v5-n9/IJISA-V5-N9-1.pdf |
 |