How to Directly Drive x.27 or x.40 Stepper Motors - MobiFlight/MobiFlight-Connector GitHub Wiki
[!CAUTION] This tutorial is obsolete. See the updated documentation to learn how to use stepper motors with MobiFlight.
For this tutorial, you need the following components
- MobiFlight Connector
- MobiFlight Compatible Arduino with the newest MobiFlight Firmware
- x27 Stepper (Singleshaft) and/or x40 (DoubleShaft) Stepper
- Soldering Iron, Soldering tin, wires
Connect the wires to consecutive pins in your Arduino:

Go to "MobiFlight Modules"
Add a new device (Stepper Motor), then configure the pins, so that Pin 2 and Pin 3 are swapped:

It is important to have these two pins swapped otherwise the stepper will just buzz around angrily.
Under "Output" create a row, and name it what you'd like. Don't forget to check the active box.
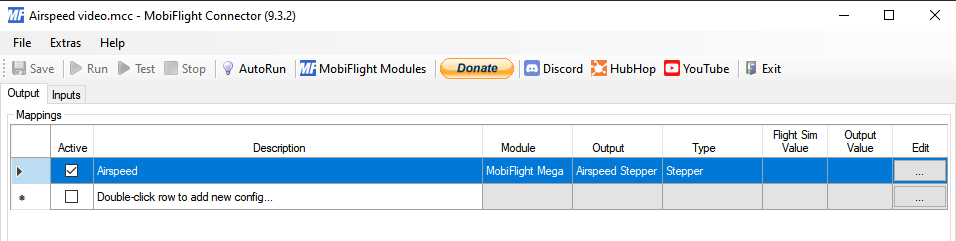
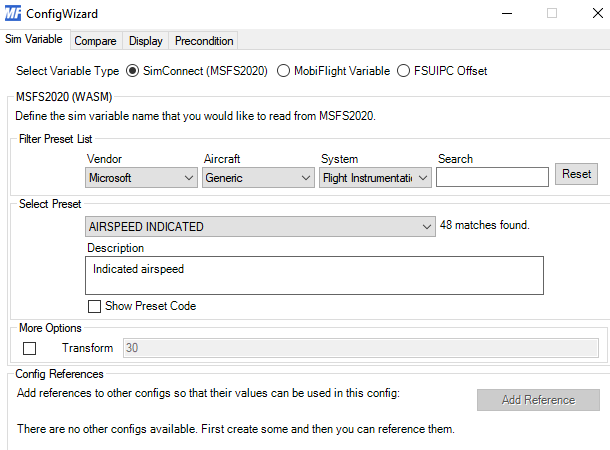
Configure the stepper to whatever you'd like.
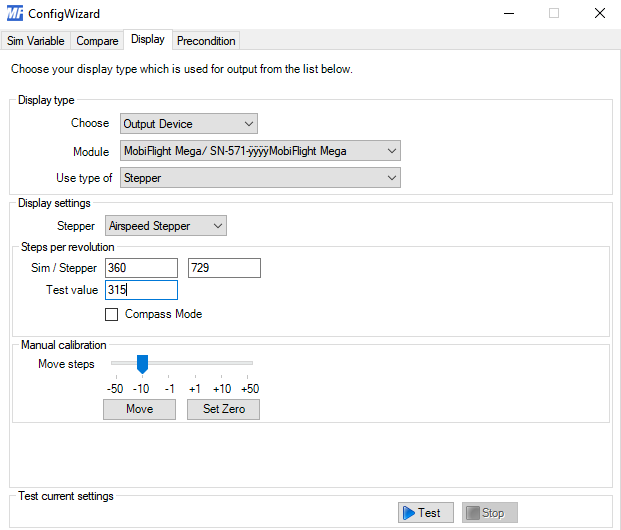
Under display, choose your stepper and insert your sim/stepper value. For me I found moving the stepper 729 steps gives 360 degrees of motion. The stepper has 315 degrees maximum so I set this as the test value.
This was written by Captain Bob with help from Discord Members @Ralf (elral66), @Tuomas Kuosmanen (tigertfly), @Jaime Leon and @John Toroid Thank you so much for helping me get it to work!