BLE indoor position cn - MarkDing/IoT-Developer-Boot-Camp GitHub Wiki
中文 | English
定位技术有着非常广泛的应用,例如在全球范围内普遍使用的GPS。然而,GPS在室内环境下并不能很好地工作,因此需要有一种切实可行的室内定位技术,可以使用追踪系统来追踪单个物体的位置(或方向),或者让设备自行追踪其在室内环境中的位置。这种定位系统可用于追踪仓库中的资产、追踪商场中的人员,或者人们可以使用它来确定自己的方向及位置。有两种传统的方法来计算物体所在的位置:三边测量和三角测量。
三边测量意味着确定物体与多个位置固定的定位器间的距离,并通过找到满足所有距离测量的点来确定位置。距离可以通过接收信号强度(RSSI)测量或飞行时间测量来确定。不过,RSSI测量其精确度并不高,而飞行时间测量则需要高度准确的时间测量。
三角测量意味着确定固定位置定位器看到被测物体的角度(或被测物看到固定位置定位器的角度),然后由各个角度的交点来确定被测物的位置。与使用 RSSI 测量的三边测量相比,这种方法可以提供更准确的位置,同时不依赖于高精度时钟,其成本比飞行时间测量所需的硬件成本更低。然而,它需要一个天线阵列和一种可以确定信号方向(角度)的计算方法。
本文描述了到达角和出发角的测向方法背后的理论基础。并讨论了蓝牙5.1是如何支持测向功能,以及Silicon Labs如何使用蓝牙协议栈和实时定位软件库(RTL lib)提供测向(DF)解决方案,以加快用户产品的开发。同时,我们还讨论了如何在办公环境中搭建演示环境,并进行实际环境下的演示。
复杂的测向理论可以简化为以下基本原理:如果多个接收天线并排放置,单个发射器发射的无线电波将以不同的相位到达不同的天线。从不同天线上所接收到信号的相位差,就可以计算出无线电波的方向。
由于角度是相对于接收器确定的,因此我们也将这种技术称之为到达角。

上面的设置也可以反过来。如果多个天线以相同的初始相位发射无线电波,那么单个天线可以测量不同入射波的相位差,并计算得出自己相对于发射天线阵列的方向。由于角度是相对于天线发射阵列来确定的,因此这种用例称为出发角。

请注意,在AoD场景下,发射器(信标)必须在每个天线上以相同的频率发射,这是角度计算的先决条件。这也意味着天线不能同时传输,否则它们的信号会相互干扰。为了解决这个问题,发射设备必须在发射天线之间顺序切换,接收端必须知道天线阵列配置和相应的切换顺序。
为了确定输入信号的角度,必须在足够长的时间段内发送具有连续相位、恒定幅度和恒定频率的信号,以便所有接收器天线都能对其进行采样。
蓝牙 5.1 引入了一种新方法来请求和发送CW(连续波)信号。作为普通数据包的扩展,此扩展被称为Constant Tone Extension (CTE),在请求发送CTE时,它会在普通数据包的CRC之后发送。

CTE 既可以通过连接(在接收到 LL_CTE_REQ 数据包后的 LL_CTE_RSP 数据包中)发送,也可以通过周期性广播(在 AUX_SYNC_IND 数据包中)发送。此外,Silicon Labs蓝牙协议栈提供了一种私有的解决方案,其中CTE可以在扩展广播(AUX_ADV_IND 数据包)中发送,这使得Direction Finding在所能定位的资产数量方面更具可扩展性。
基于连接的模式由蓝牙SIG规范所定义。面向连接的测向使用LL_CTE_RSP数据包来发送CTE信号,这些数据包通过蓝牙连接发送以作为LL_CTE_REQ PDU的响应包。
下图所示是CTE信号的请求过程,它用于请求远端设备链路层发送包含 LL_CTE_RSP PDU 和CTE的数据包。远端设备将回应一个 LL_CTE_RSP PDU,该PDU 包括所请求类型的CTE,其长度大于或等于所请求的长度。反之,远端设备的链路层将响应一个 LL_REJECT_EXT_IND PDU。

通过Network analyzer抓取的网络数据说明了在基于连接的场景中如何发送CTE。

非连接模式下,蓝牙测向技术使用蓝牙周期性广播,并将CTE信号附加在AUX_SYNC_IND PDU中。

通过Network analyzer抓取的网络数据说明了在非连接模式下如何发送CTE。

Silicon Labs 资产标签示例应用程序在扩展广播中发送 CTE,这是Silicon Labs独有的解决方案,因此采用这种模式的标签只能与支持该模式的Silicon Labs定位器一起使用。
该解决方案的优点是它使用扩展广播,与基于连接和周期性广播的方法相比,它不需要在标签或定位器端存储同步信息或蓝牙连接的信息,可以有效减小系统RAM的消耗。该解决方案的扩展性比其他两个好得多,可以同时支持数百个标签一起使用。
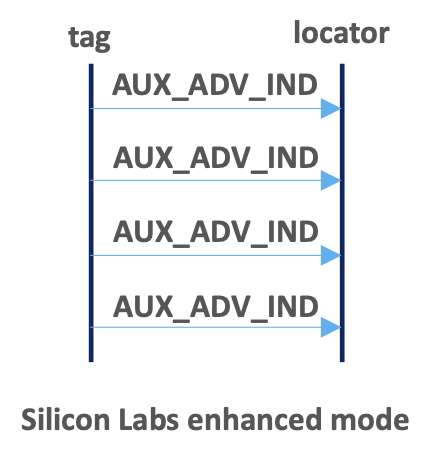
通过Network analyzer抓取的网络数据说明了在 Silicon Labs改进型模式下如何发送CTE。

虽然CTE是一个简单的连续波,其长度为16 μs到160 μs,但是依据蓝牙核心规范(Vol. 6, Part B, Section 2.5),它被划分为几个周期。
CTE的前 4 μs 称为guard period,接下来的 8 μs 称为reference period。在reference period之后,CTE由一系列交替的switch slot和sample slot组成,每个长度为1 μs或2 μs,具体由应用程序指定。
在使用蓝牙定位技术时,CTE发送端和接收端必须支持 2-µs 长的switch slot和sample slot,可选择性支持 1-µs 长的switch slot和sample slot。采用2-μs 时隙可以在具有更长转换时间的天线之间使用更便宜的 RF 开关,采用1-μs时隙则可以对每个天线进行多次采样,这有助于降低噪声的影响以提高精度。
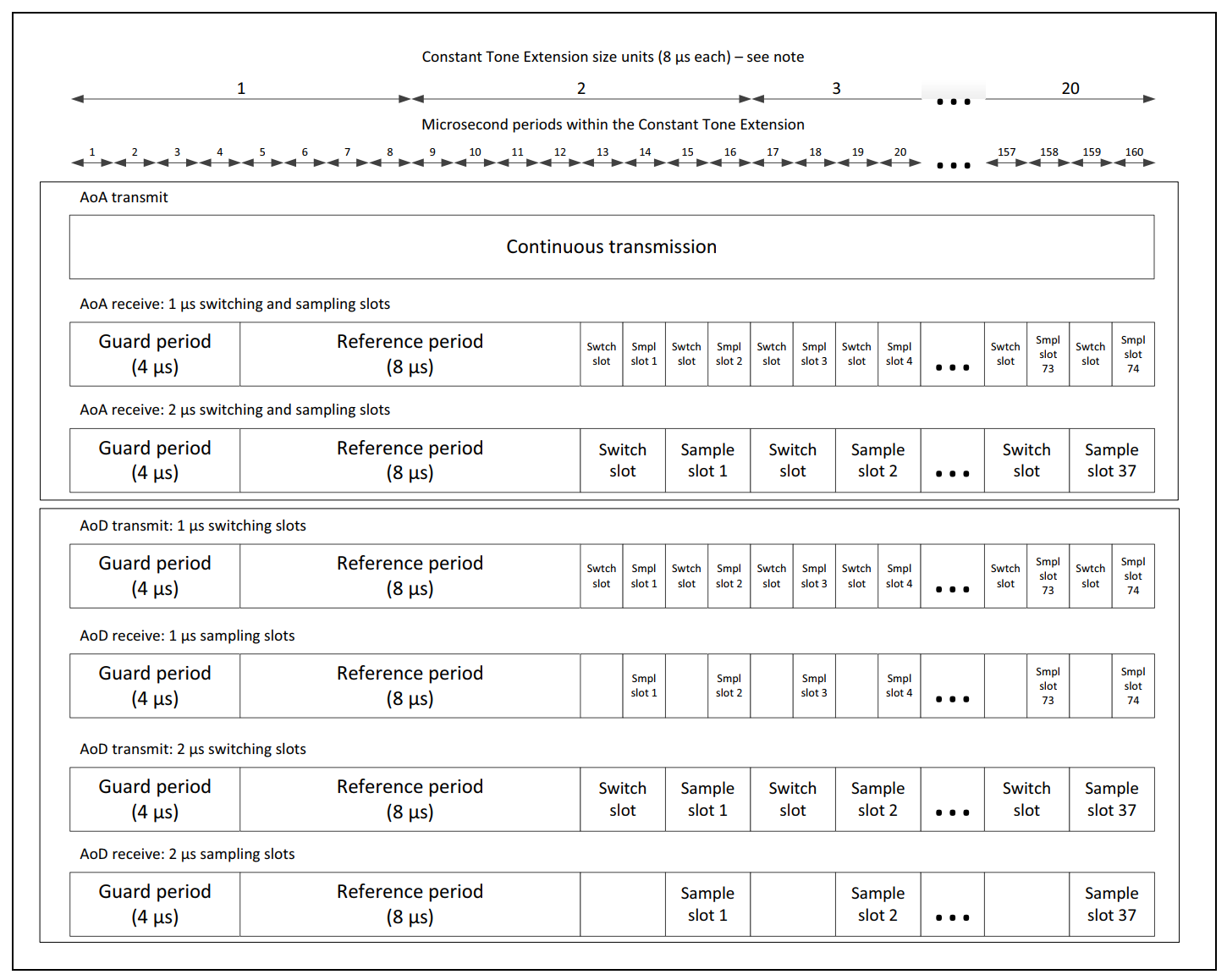
一旦CTE启动,radio就开始以其原始采样率对基带信号的同相 (I) 和正交 (Q) 分量进行采样。然后将样本下采样至1个样本/μs的采样率。前4个样本(在guard period中获取)被丢弃,然后 8 个样本(在reference period中获取)将存储在样本缓冲区中。最后,在switch slot中获取的每个样本都被丢弃,在sample slot中获取的每个样本都将存储在样本缓冲区中。
此时,共计有 N = 8 + (L – 12) / 2 / S 个同相 (I) 和正交 (Q) 样本存储在缓冲区中,其中 L 是 CTE 的长度,以微秒为单位, S 是以微秒为单位的slot长度。I 和 Q 样本合并到具有 2N 个元素的公共 IQ 样本缓冲区中,I和Q样本交替:I(0)、Q(0)、I(1)、Q(1)、I(2 ), Q(2), I(3), Q(3), ... I(N), Q(N)。
如果slot为 1-us 且 CTE 的长度为 160us,则总共将有 82 个 I/Q 对,总共 164 个字节。N = 8 + (160-12) / 2 / 1 = 8+74 = 82
使用Silicon Labs方案,可以非常方便的从回调函数“aoa_cte_on_iq_report”中获取I/Q采样数据。

理想情况下,所有天线应该同时采样,以便于计算它们之间的相位差。然而,单radio的系统无法做到这一点。要实现对多个天线采样,只能采用时间分割的方法,也就是在连续的时间内对多个天线进行逐个连续采样,然后再对相位作补偿。在reference period中的采样,都是在同一天线上进行的,我们可以用它来测量1 μs间隔内的实际相移,作为相位补偿值。
考虑到这一点,基带中 CTE 信号的频率为 fΔ + foffset,根据蓝牙规范,其中 fΔ = 250kHz,foffset 在 10kHz 左右。因此,具有 1-μs 差异的两个连续样本之间的相移约为 𝜙 = 2𝜋(fΔ + foffset)𝑡 ≅ 2𝜋 ∙ 0.25 ∙ 1 = 0.5𝜋 = 90°。考虑到频率偏移,它可能会在 80°-100° 之间变化。
使用𝜙 = atan2(−𝑄, 𝐼),我们可以很容易的从采样所得出的I/Q原始数据计算信号的瞬时相位。以reference period为例,计算得出两个连续样本之间的相移在 85° 左右。

在不知道定位器距离标签的准确距离,或标签是否被限制在某2D平面中移动的情况下,使用单个天线阵列只能提供标签的方向,但不能给出其具体位置。
要确定标签的精确位置,必须使用多个天线阵列。通过使用多个天线阵列,可以使用三角测量来确定标签的位置。标签可以在由测向算法确定的方向上所绘制的线的交点处找到。三角测量也可以使用三边测量来进行补充,将RSSI测量值添加到AoX系统中可以进一步增强位置计算的精度。

从IQ 样本估算到达角 (AoA) 或出发角 (AoD) 并非易事,尤其是在充满各种无线反射信号的真实环境中。
为了减轻开发人员的负担并加快产品的开发过程,Silicon Labs提供了一个实时定位库 (RTL lib),用于处理从蓝牙协议栈所接收的 IQ采样值,实现多路径检测以及方位角和俯仰角计算,并通过API将数据提供给应用程序。

此外,RTL库还能够使用三角测量,在多定位器场景中估算被跟踪标签的位置。多个定位器从同一标签接收CTE,在已知各个定位器位置的前提下,使用定位器的位置和估算的角度(AoA)作为输入值,即可以估算得出标签所在的位置。

使用 Silicon Labs RTL 库的实时定位系统的一般架构如下所示:
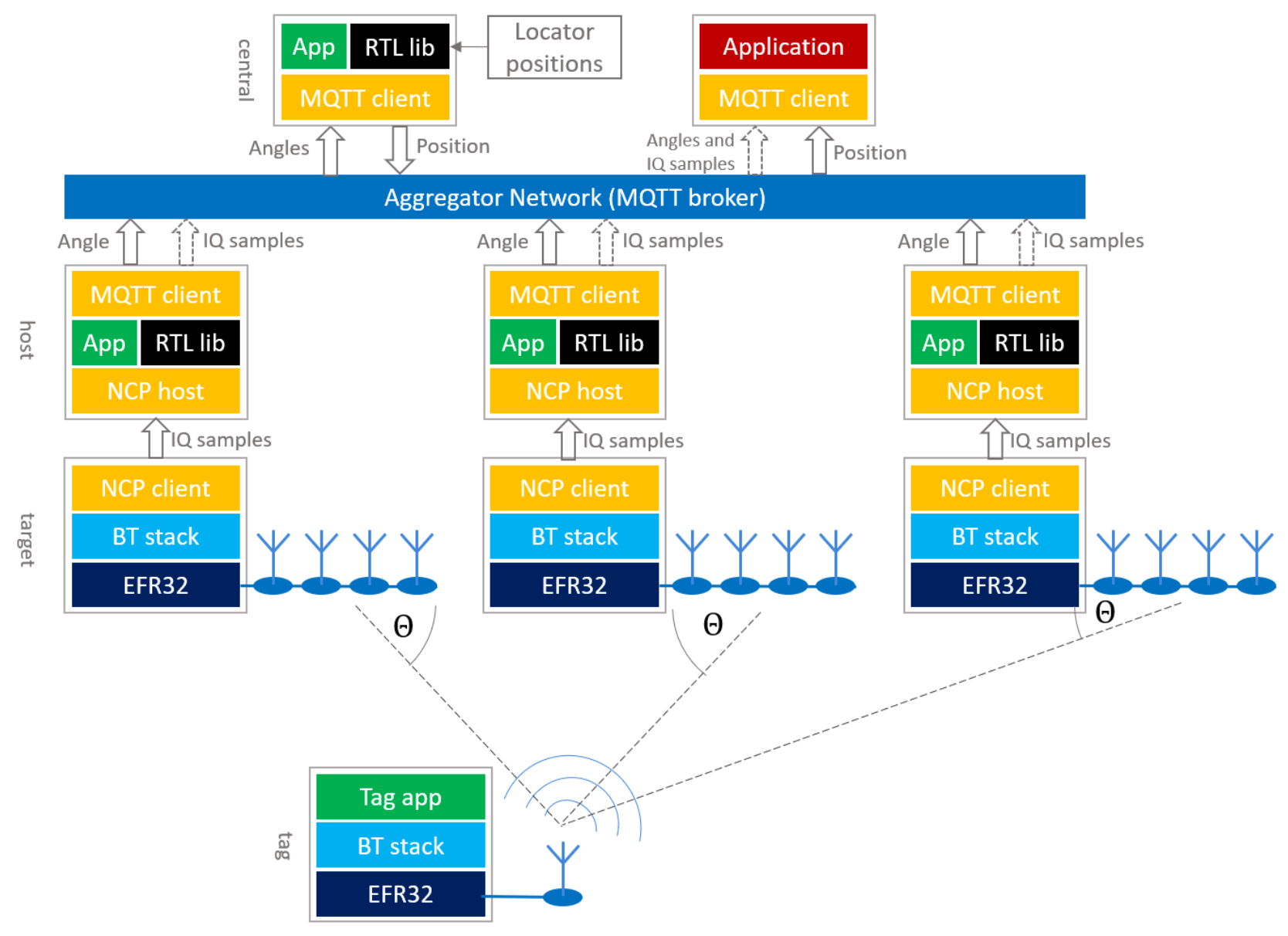
如架构图所示,Locator工作在网络协处理器 (NCP) 模式,即协议栈运行在EFR32芯片上,但应用程序运行在主机上用于处理IQ采样。定位器应用程序输出估算的角度数据或将IQ采样数据直接转发到上层。
目前,由于EFR32芯片的计算能力有限,它仅支持NCP模式的定位器,即在撰写本文时,EFR32 芯片上暂时无法运算RTL库。
定位器可以通过多种方式连接到中央处理器。Silicon Labs的参考实现使用 MQTT 从定位器收集角度数据或 IQ 采样。使用MQTT可以灵活地在分布式网络,或者使用localhost的单个 PC 上运行主机示例应用程序,来收集各个locator端所计算得出的角度数据或者IQ采样。
使用RTL 在中央PC上估算得出位置信息之后,就取决于用户的应用程序如何处理数据,例如,用户可以将位置集成到他们的室内地图和导航系统中。
本章节重点介绍如何搭建AoA演示环境。这包括如何创建AoA Asset Tag项目并使用不同的 CTE 模式。实验中,我们还将展示如何编译主机示例应用程序 aoa_locator,以根据天线阵列所捕获的 IQ 数据估算角度。以及如何设置Silicon Labs提供的定位主机应用程序来实现标签的定位。
为了简化使用 Silicon Labs 的 RTL 库的配置和开发,我们还提供了蓝牙测向工具套件,以通过交互式图形界面配置单个或多个蓝牙定位器,以评估RTL库的性能。AoA Positioning Tool演示应用程序则可以用于演示RTL库的位置估算功能。
对于本实验,你将需要以下硬件:
- 4个或更多WSTK主开发板
- 4个或更多EFR32BG22天线阵列板(推荐使用双极化天线阵列板BRD4191A)
- 1 个 Thunderboard BG22 (BRD4184A) 或 1 个 Thunderboard xG24 (BRD2601B)
- Simplicity Studio v5
- Gecko SDK v4.1.1 或更高版本
- Bluetooth SDK 4.1.1 或更高版本
本实验将向你展示我们如何在办公环境中设置AoA演示,演示中将包含 1 个标签和 6 个定位器。所有的天线阵列都固定在天花板上,面朝下,这可以确保在测试环境下标签与定位器间更好的直视路径。正如我们在 AN1296 中推荐的那样,天线之间的距离为 3-5 m。
- 地点:办公环境,开放空间,测量区有很多桌子、金属架子、隔间
- 定位器距地面高度:2.5 m
- 标签离地高度:1.5 m
- 测试范围:50 m2
下面是具体的测试环境,及定位器的坐标和方向的拓扑结构图。


要设置演示,首先需要在天线阵列板上烧录正确的软件。
- 启动 Simplicity Studio 5。
- 通过 USB 或以太网连接将天线阵列板连接到 PC。

- 在Simplicity Studio Debug Adapters视图中选择天线阵列板(Direction Finding board),并确保选择 Gecko SDK Suite v4.1.0(或更高版本)作为当前所使用的SDK。
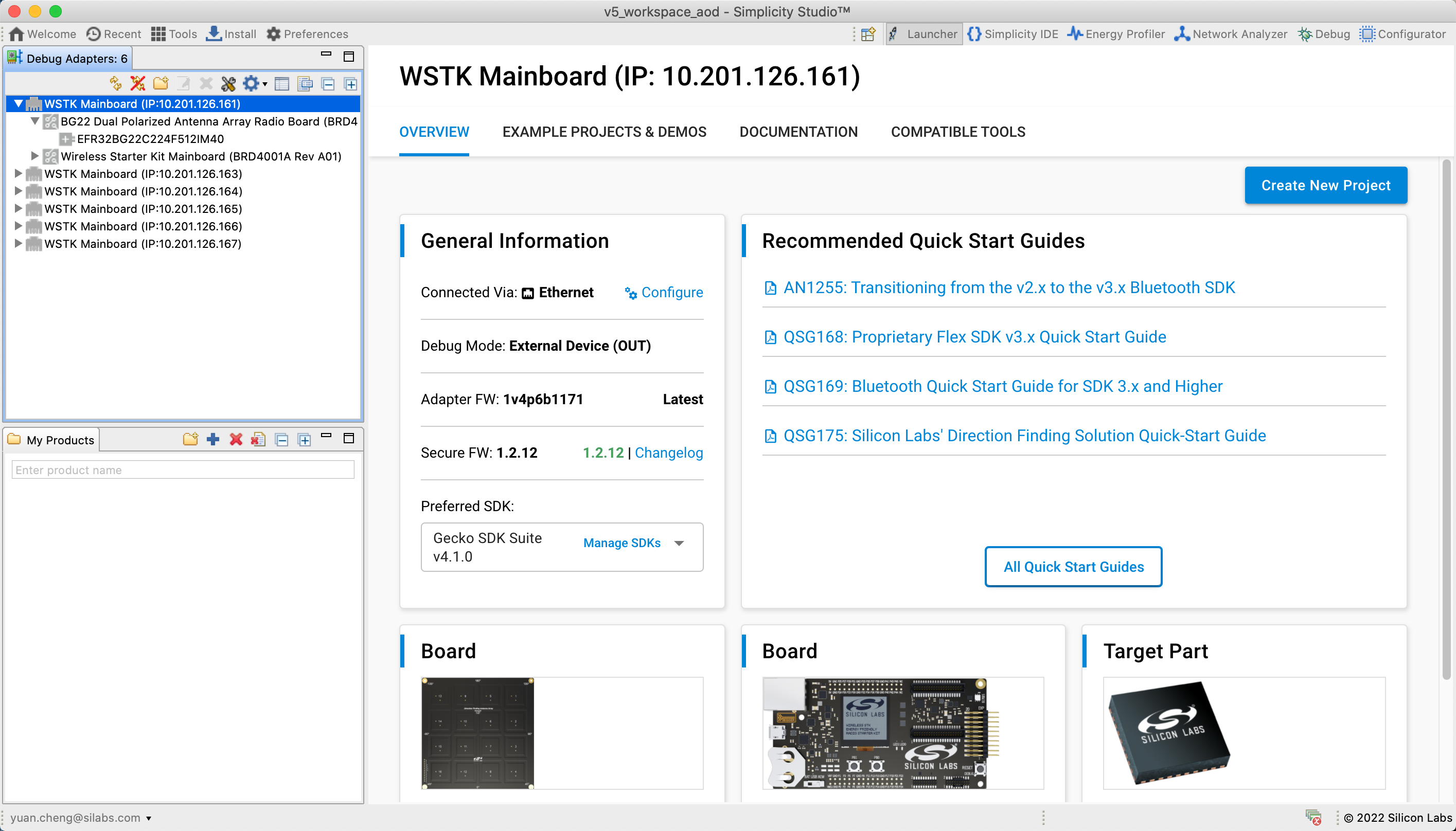
- 选择 Example Projects & Demos 选项卡,过滤蓝牙技术类型,然后找到Bluetooth – NCP AOA Locator 演示示例。

- 单击 RUN以下载并在你的板上运行示例程序。(注意:该示例程序已包括了一个引导加载程序,如果你从源代码创建NCP AoA Locator应用程序,则还必须将引导加载程序烧录至设备中)
接下来,在EFR32xG22 或 EFR32xG24 开发板上烧录标签侧软件。请注意,SDK中预编译的演示程序仅适用于 Thunderboard BG22,对于其它板,用户需要自行创建AoA Asset Tag项目,并将其与Bootloader程序一起烧录到设备中。 以下说明适用于 Thunderboard BG22。
- 将 Thunderboard BG22 连接到 PC。
- 在 Debug Adapters 视图中选择开发板,并确保选择 Gecko SDK Suite v4.1(或更高版本)作为默认的SDK。
- 切换到示例项目和演示选项卡,过滤蓝牙技术类型,然后找到蓝牙AoA – SoC Asset Tag演示程序。
- 如果这是一个新的 Thunderboard BG22,请按下它的重置按钮。在某些板上,出厂默认固件会在 30 秒后将设备置于 EM4 睡眠模式,因此在烧录器烧录演示程序之前需要重新启动设备。
- 单击RUN以下载并运行演示程序。
如果你使用的是 EFR32xG24 开发套件,SDK中并没有直接可用的预编译演示程序,你需要创建“Bluetooth AoA – SoC Asset Tag”项目,编译并下载到开发套件中。 在默认情况下,Bluetooth AoA - SoC Asset Tag示例程序支持 Silicon Labs 改进型 CTE 模式。如果你想切换到非连接模式,则应卸载*Constant Tone Extension GATT Service (Silabs Proprietary)软件组件,然后安装Constant Tone Extension GATT Service (Connectionless)*组件。
我们推荐使用 Thunderboard BG22来作为AoA系统的评估和开发。此外,Silicon Labs 还提供了另一种 EFR32BG22 标签设计,它是一个可以直接复制粘贴的蓝牙资产标签参考设计。它的大小与CR2032钮扣电池差不多,其中包括 BG22 蓝牙 SoC、HFXO 和 LFXO(可选)晶体、PCB天线和匹配组件以及可选传感器(加速度计和气压计)以及简单的人机交互接口(按钮和 LED)。

EFR32BG22标签参考设计的设计文件可以从Technical Library 下载。
在编译和运行任何主机示例应用程序之前,必须安装 Mosquitto MQTT 代理。安装完成后,确保 mosquitto 服务正在运行。
安装好最新的蓝牙SDK后,使用命令cd $GSDK_DIR/app/bluetooth/example_host/bt_aoa_host_locator跳转到 example_host/bt_aoa_host_locator 目录,然后使用命令 make 编译项目。
项目编译完成后,在bt_aoa_host_locator exe文件夹内将会生成一个可执行文件。使用以下命令运行应用程序:
bt_aoa_host_locator -t <tcp_address> | -u <serial_port> [-b <baud_rate>] [-f] [-l <log_level_filter>] [-m <mqtt_address>[:<port>]] [-c <config>] [-h]
-h 选项可用于打印帮助消息,以了解所有可用选项。
假设你通过TCP/IP连接来访问天线板,请执行以下命令运行应用程序,< config >是locator对应的配置文件。
./exe/bt_aoa_host_locator -t 10.201.126.68 -c <config>
AoA 定位器配置是角度估算的重要步骤,它包含天线类型(模式)的配置选项、CTE 配置、角度估算参数、允许的标签列表和角度掩码等。当使用 Silicon Lab 的双极化天线板(即 BRD4191A)的默认设置时,无需配置即可启动主机应用程序。在任何其他情况下,用户则必须在运行前或运行期间修改配置。
AoA 定位器主机应用程序的整个配置文件或特定配置参数可以通过MQTT即时更新,而无需重建和停止应用程序。
切换到“example_host/bt_host_positioning”目录并使用make编译项目,在exe文件夹中生成一个可执行文件bt_host_positioning。使用以下命令运行应用程序:bt_host_positioning -c <config>
定位配置文件包含了定位程序和单个AoA定位器主机程序所使用的配置,包括天线类型(模式)、CTE 配置、角度估算参数、允许的标签列表和角度掩码,以及多定位器拓扑设置(每个定位器的坐标和方向)等。 要了解有关定位配置的更多信息,请参阅AN1296。
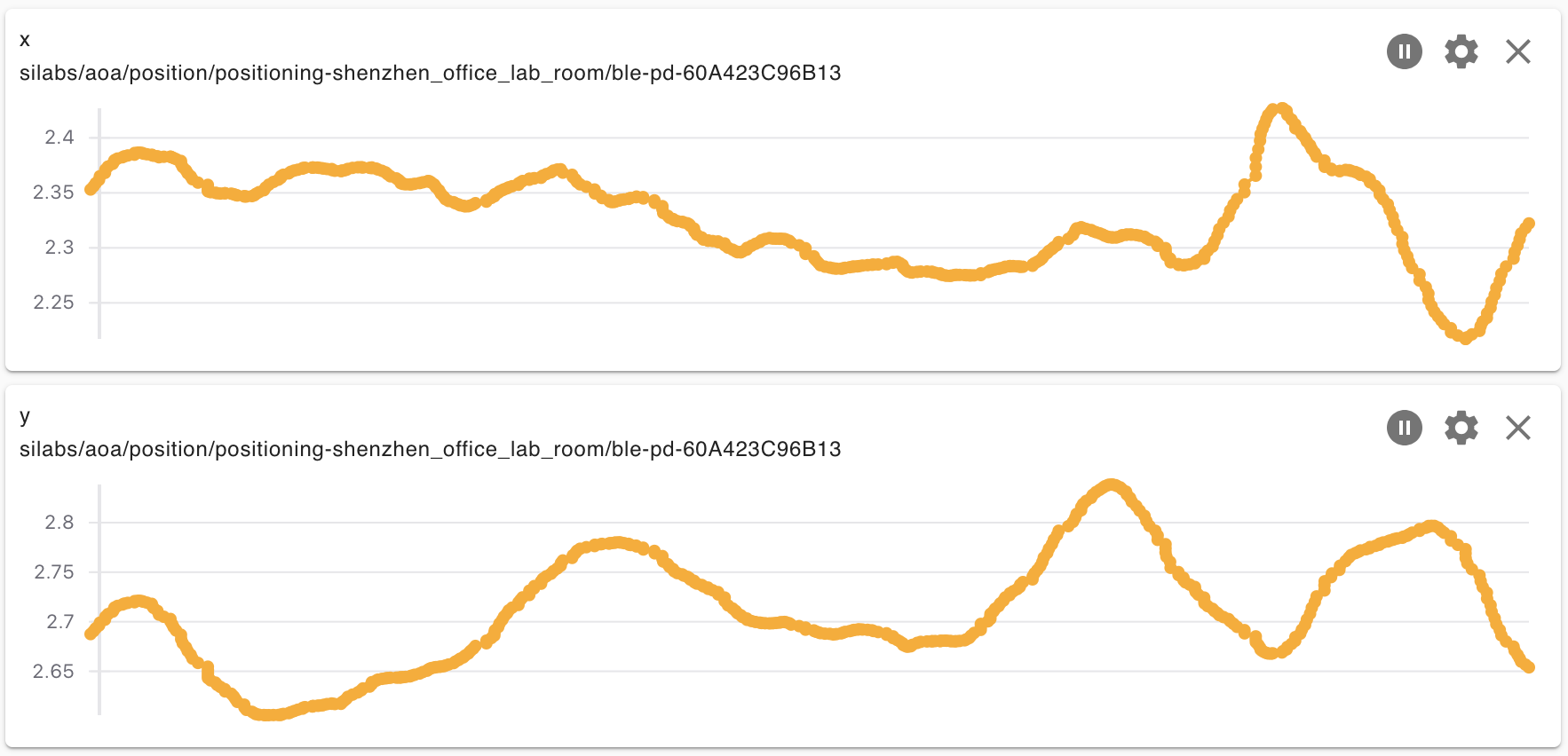
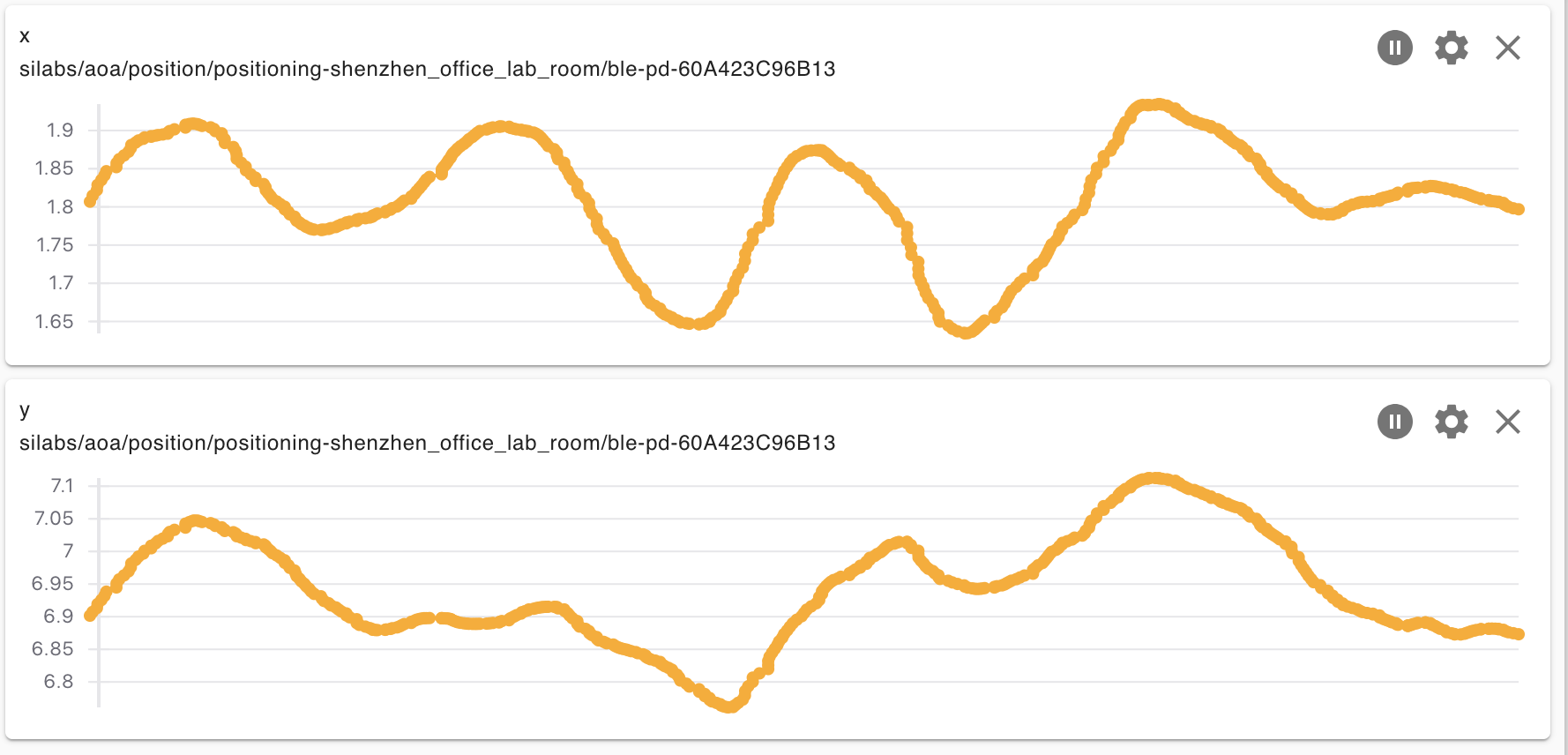
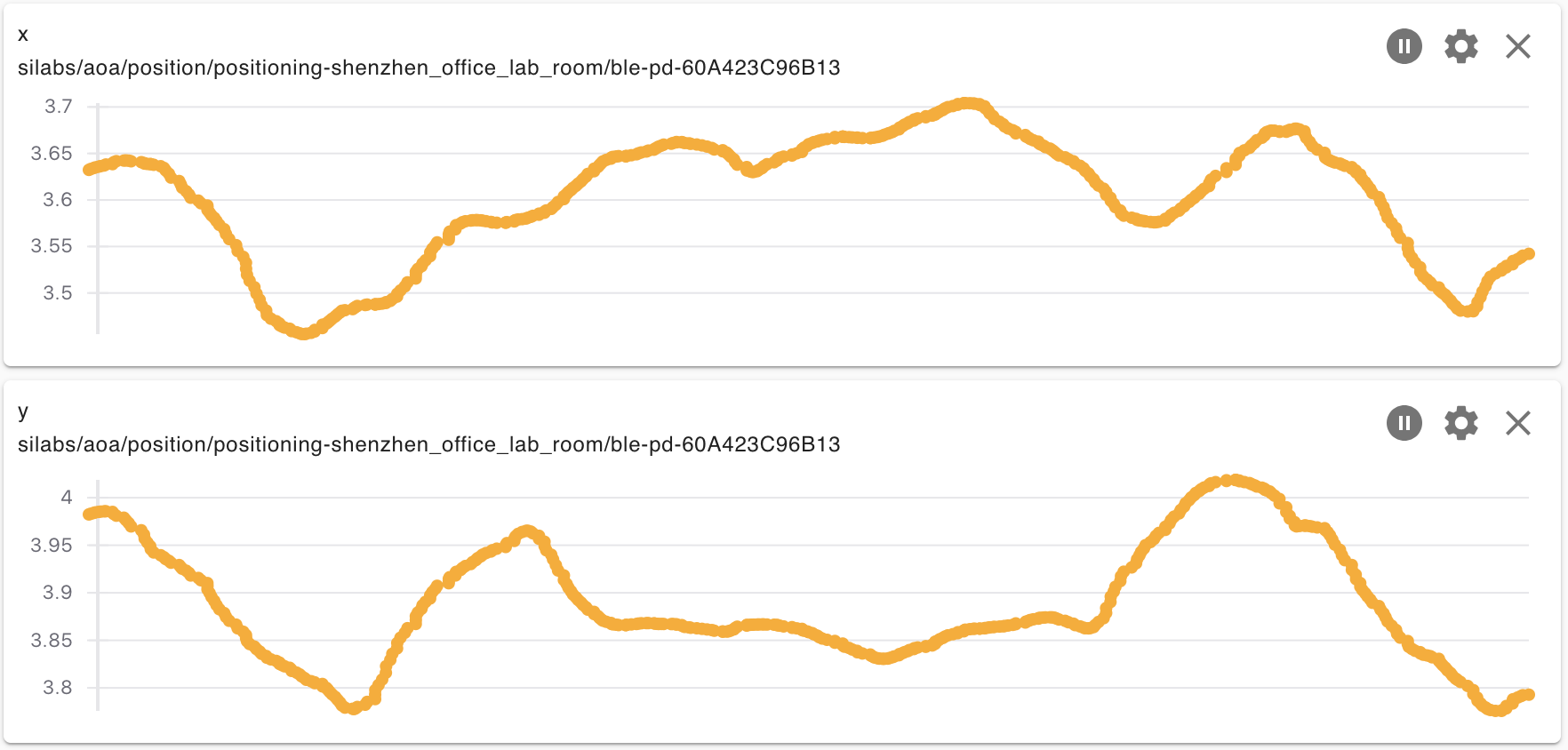
我们在实际场景下进行测试,以评估多定位器系统的定位精度。将标签固定在三脚架上,其高度约为1.5m,我们将它分别移动到如下 3 个不同的位置。

下面是AoA定位系统所估算得出的标签位置。
AN1296: Application Development with Silicon Labs’ RTL Library
AN1297: Custom Direction-Finding Solutions using the Silicon Labs Bluetooth Stack
QSG175: Silicon Labs Direction Finding Solution Quick-Start Guide
UG514: Using the Bluetooth® Direction Finding Tool Suite
 Home |
Home | ![]() Zigbee |
Zigbee | ![]() Bluetooth |
Bluetooth | ![]() ZWave |
ZWave | ![]() Proprietary |
Proprietary | ![]() Hardware |
Hardware | ![]() Common
Common
All resources of this repository are released under license CC BY-NC-ND 4.0 