Home - MARVL-Lab/MARVL-ROV GitHub Wiki
MARVL-ROV: An Open-sourced Upgrade Schematic for the Low-cost BlueROV2 for edge AI applications.
This is the Wiki for the MARVL-ROV project.
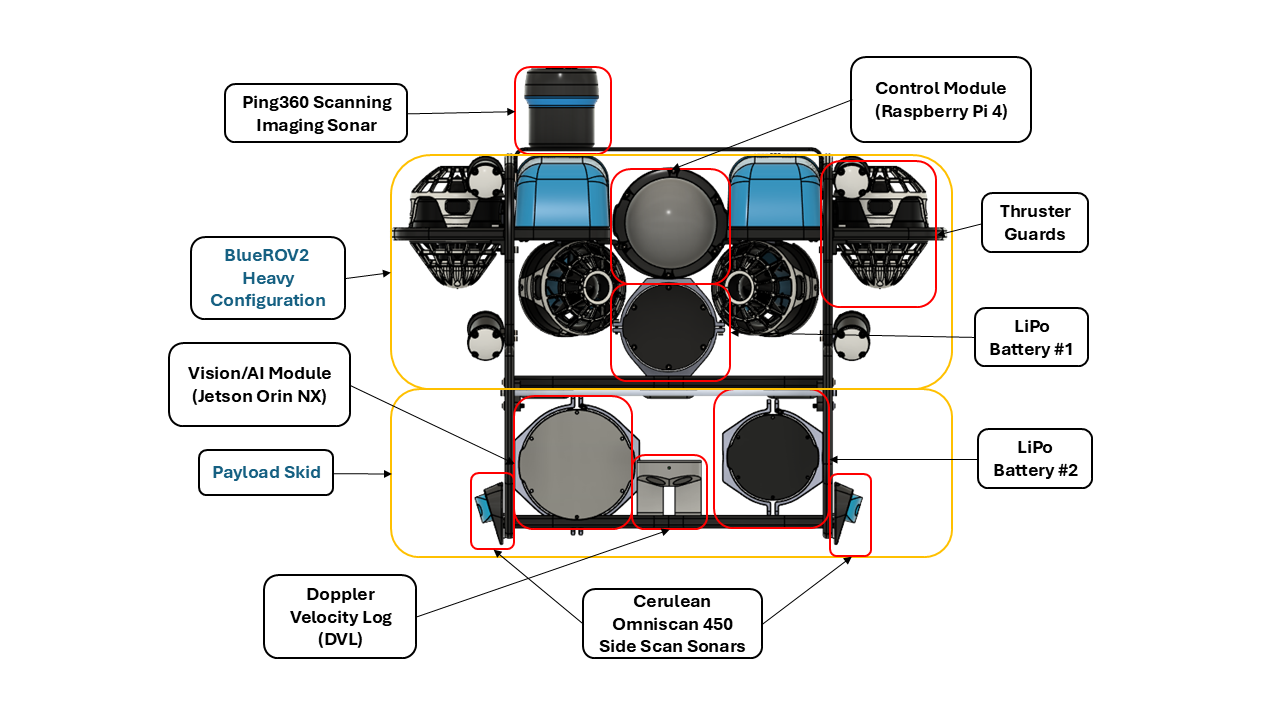
The goal of this project is to make an open source design for an upgraded BlueROV2 underwater robot with AI edge computing capabilities using the NVIDIA Jetson Orin NX computer and available Blue Robotics components.
This Wiki is a living document which will be updated from time to time.
Paper Info
The paper associated with this project is currently being submitted to OCEANS 2025 Brest. If you use our work or benefit from it please consider citing us. Additionally, please see the Licensing section below.
- Prasetyo, M. B., Hoo, J. J., Tan, Y. X., & Meghjani, M. (2025). MARVL-ROV: Modular Adaptable Research Vehicle Loadout for the BlueROV2. OCEANS.
@inproceedings{marvlrov2025,
title={MARVL-ROV: Modular Adaptable Research Vehicle Loadout for the BlueROV2},
author={Prasetyo, Marcel Bartholomeus and Hoo, Jun Jie and Tan, Yu Xiang and Meghjani, Malika},
year={2025},
organization={OCEANS}
}
Licensing
The source code is released under the GPL3 license, while this documentation is released under the CC BY-SA 4.0 license. Please see License for complete information.
Basic Info
MARVL-ROV Capabilities & Limitations
(Capabilities)
- Perception with 2 Cameras
- Blue Robotics Low-Light USB Camera
- Intel RealSense Depth Camera D435i (Stereo)
- Depth sensor & IMU readings
- Tethered Control, controlled by a joystick controller
- Tetherless Control; Waypoint Navigation
(Known Limitations)
- Activation of autonomous control is based on elapsed time during the control loop
Instructions
-
Assembly
Acknowledgement
This project is supported by A*STAR under its RIE2020 Advanced Manufacturing and Engineering (AME) Industry Alignment Fund (Grant No. A20H8a0241), the Ministry of Education, Singapore, under its SUTD Kickstarter Initiative (Proposal number: SKI 2021 05 07) and Google South & Southeast Asia Research Awards (2024).
Additionally, we are thankful for the LoCO-AUV project for inspiring this project.