Assembly Arms - MARSLab-UTRGV/Drone-Manual GitHub Wiki

STEP 1:
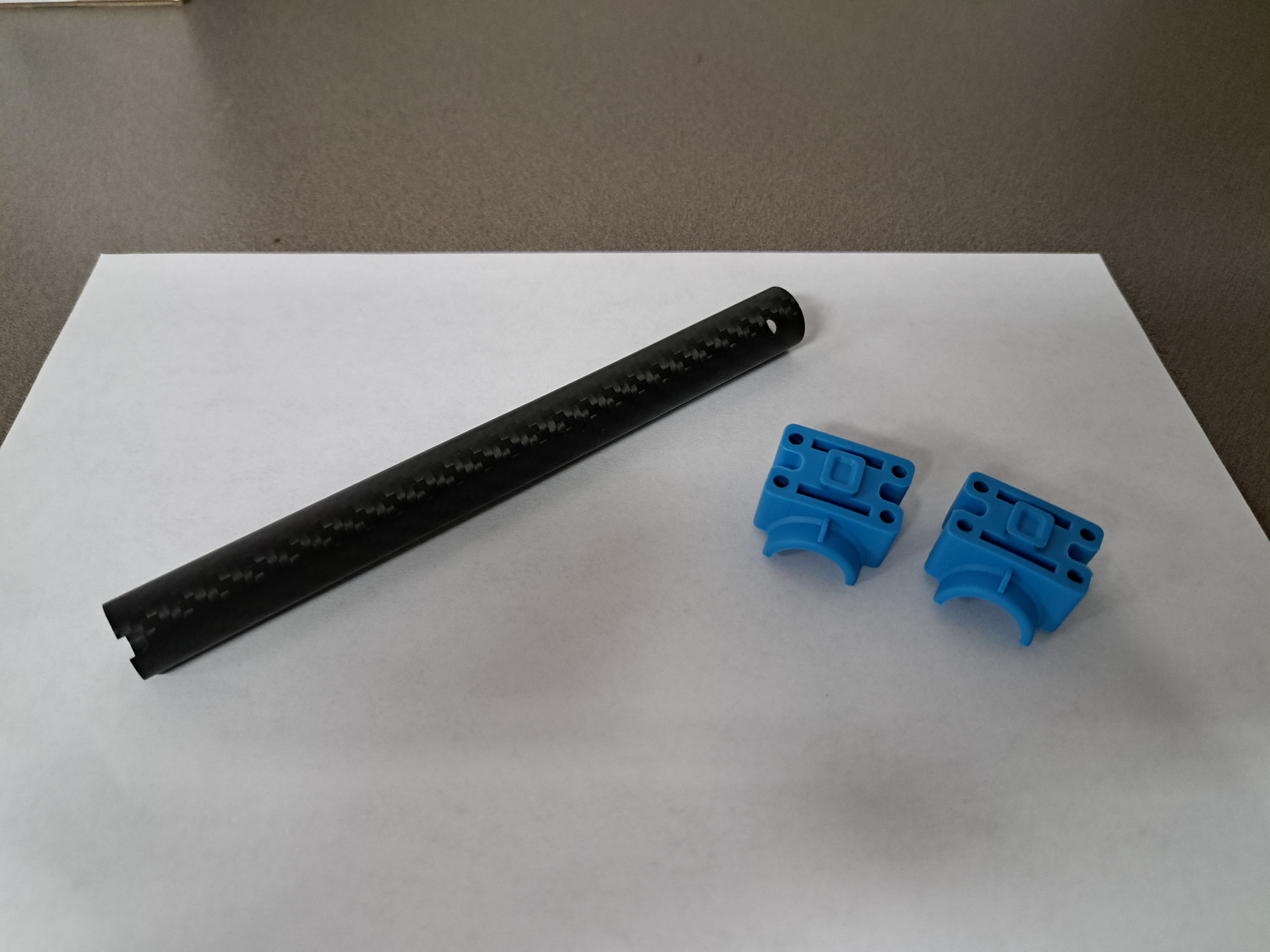
Collect the carbon fiber tube and the nylon connector parts. Use the hole to align the nylon parts.


STEP 2:
Insert the ESC into the tube. The end that connects to the controller should stick out of the nylon side.
STEP 3:
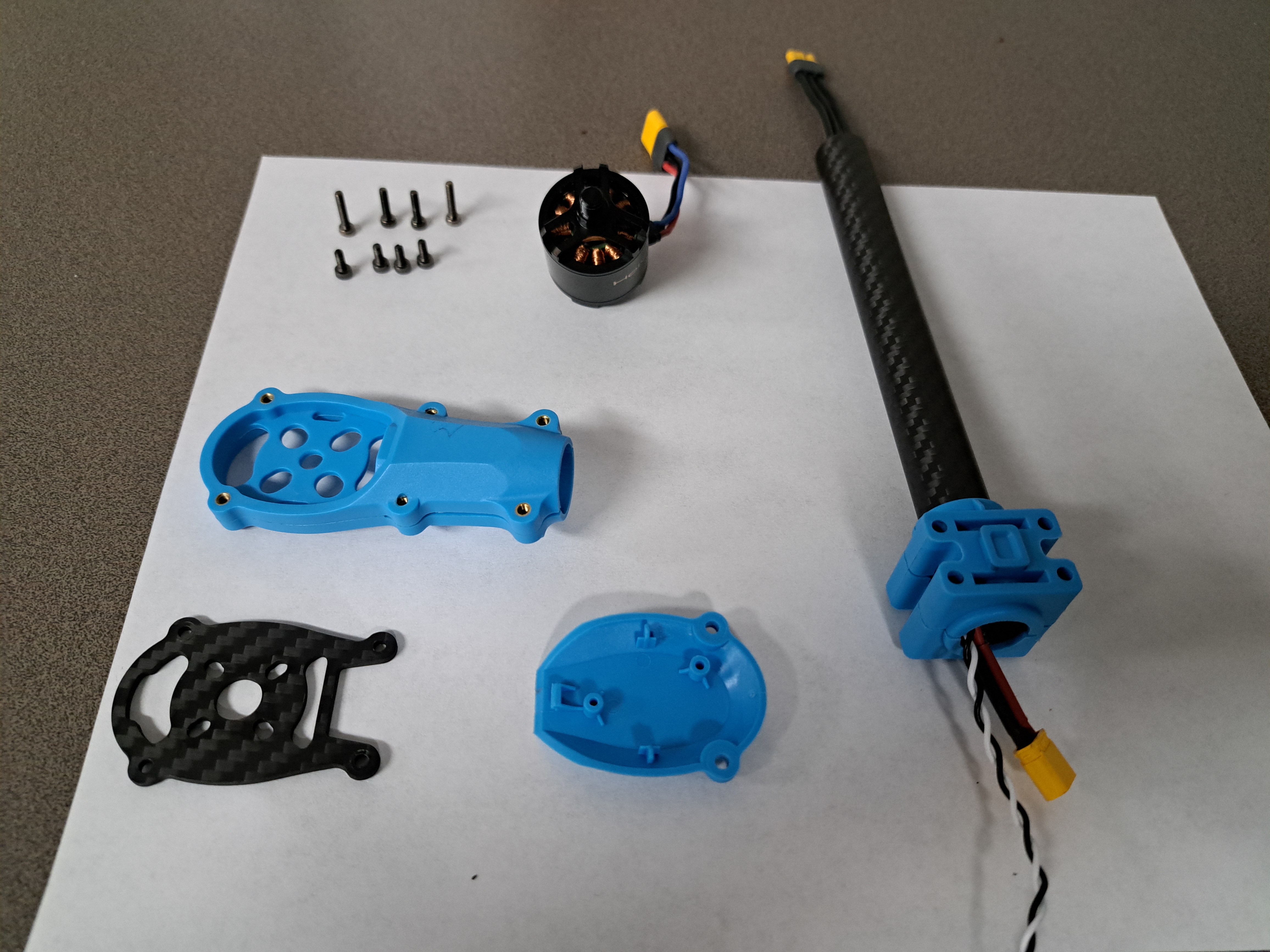
Collect the following parts to assemble an arm:
1)
2)
3)
STEP 4:
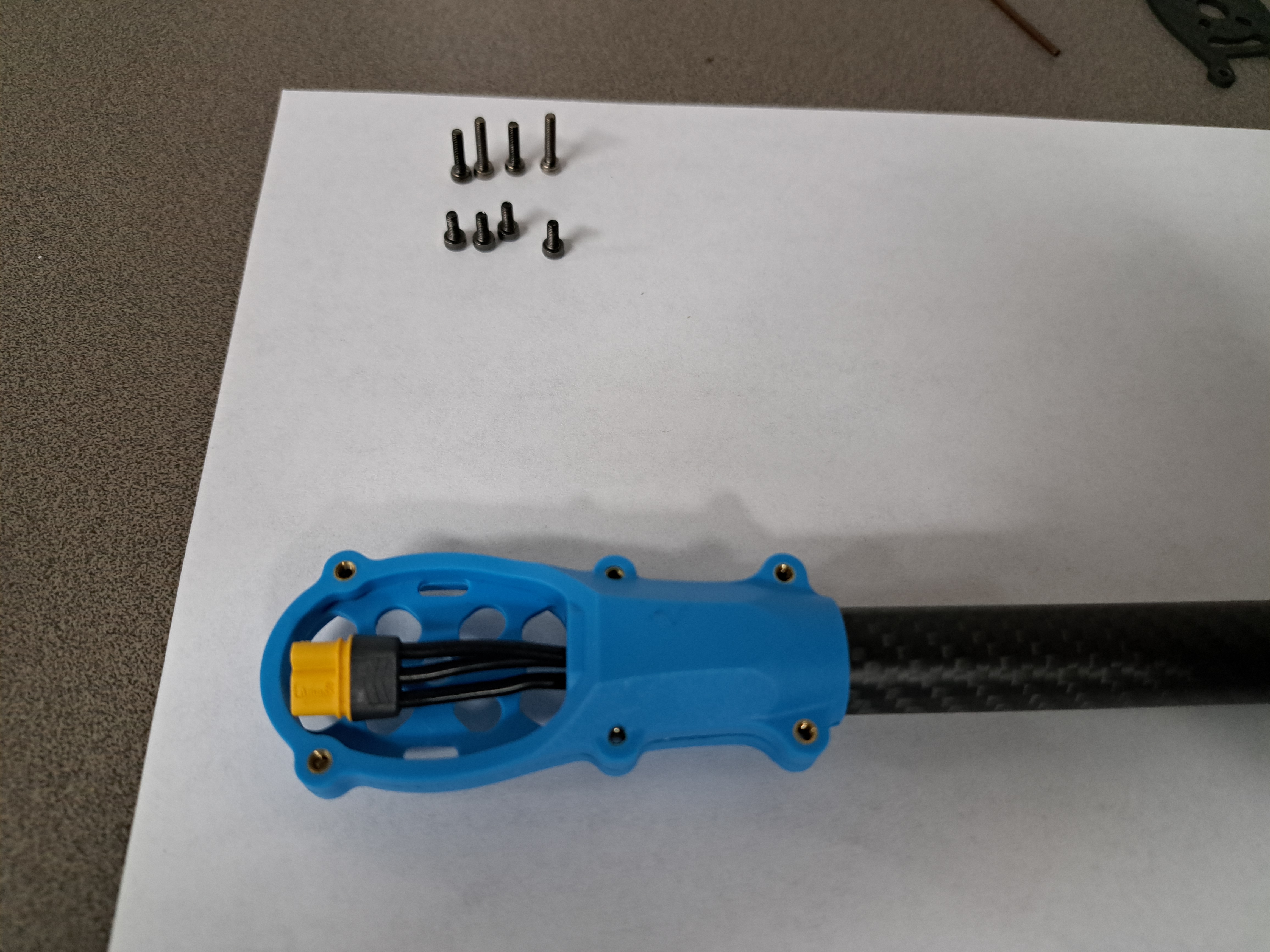
Insert the nylon part into the other end. Ensure the wire of the ESC fits as shown in the picture.

STEP 5:
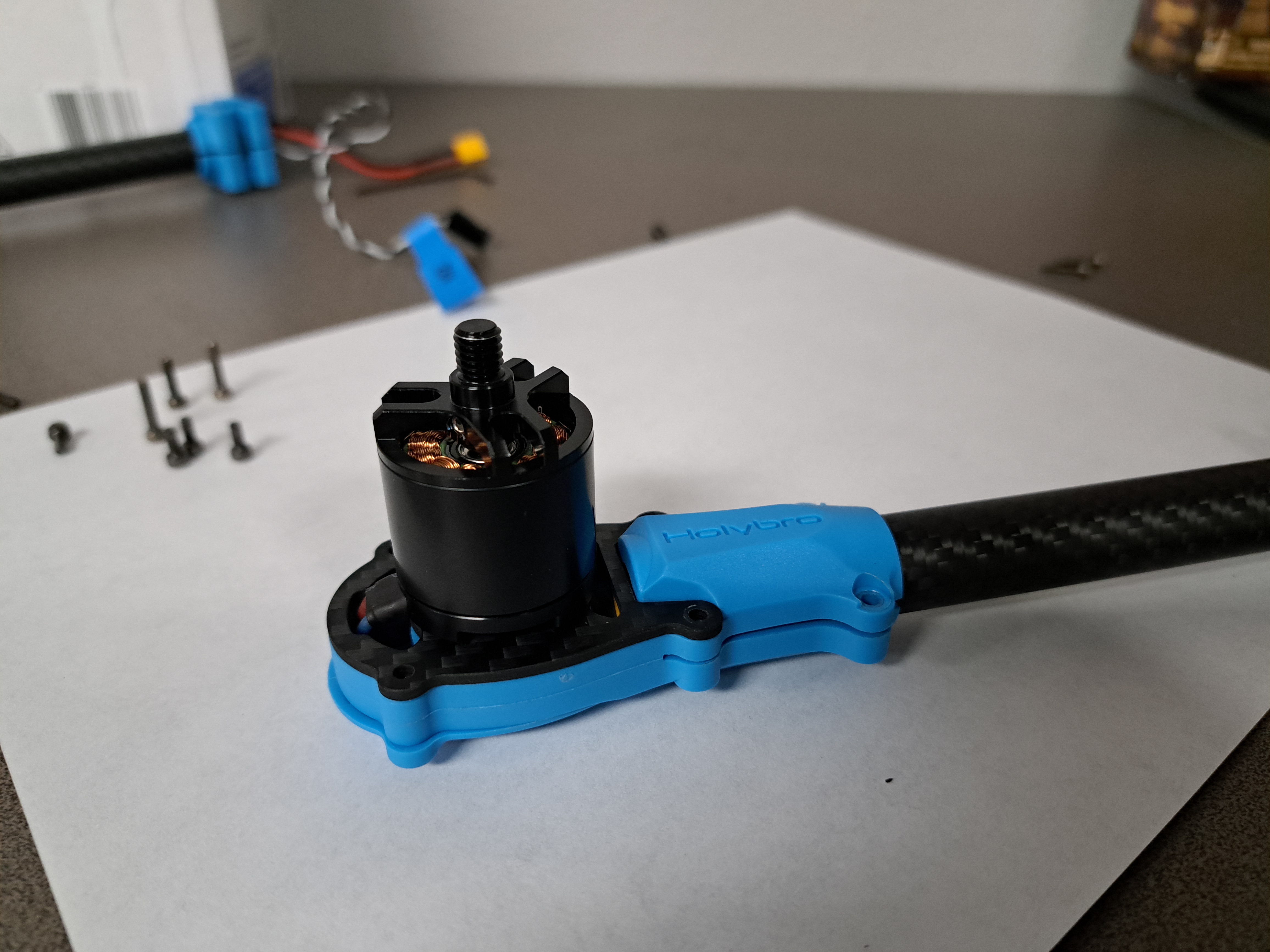
Connect the motor by passing the connector as shown above.


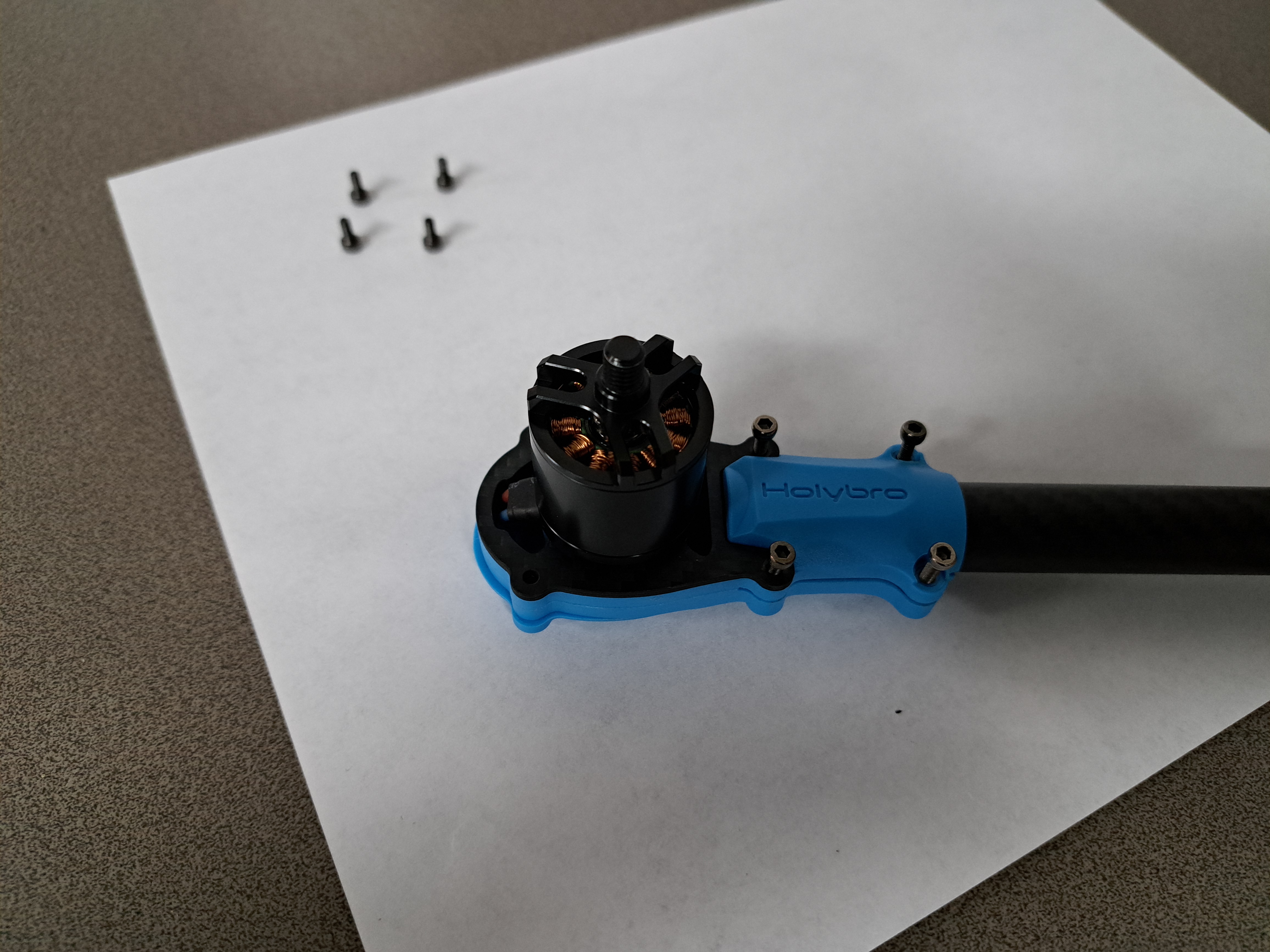
STEP 6:
Screw in the motor into the motor base using four screws M3*6.

STEP 7:
Screw together the nylon parts. using four M2.5*12 and two M2.5*6 in the tip of the arm.

STEP 8:
Screw the other end of the nylon with two M2.5*6 screws.

STEP 9:
Repeat these steps for the three other arms.