2. Pertinent Information - M-division-2021-2022-even/repo-10 GitHub Wiki
Pertinent Information 1
Name : Shravan B S Roll No : 1330 Branch : CS (AI)
Simple & Smart Robotic Arm Using Arduino
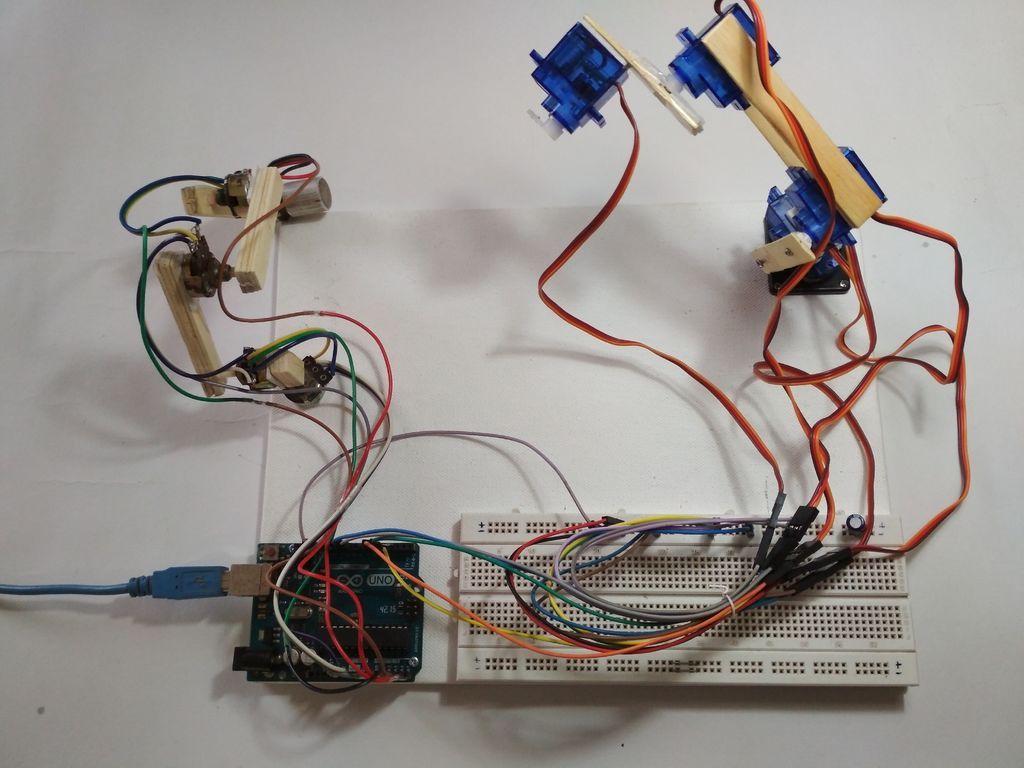
You can control this arm using a “Master” arm using potentiometers. The “Slave” arm is comprised of servos and will run off of the potentiometer readings. This will mimic manual movements. Along with this feature, the prototype is also smart because it can record positions and repeat them continuously.
Things You Will Need -
Arduino UNO ( Arduino Nano or Arduino Mega ) x 1
Micro Servos ( Standard Servos ) x 5
10k ohm Potentiometers x 5
Breadboard Kit
Wire up the Servos
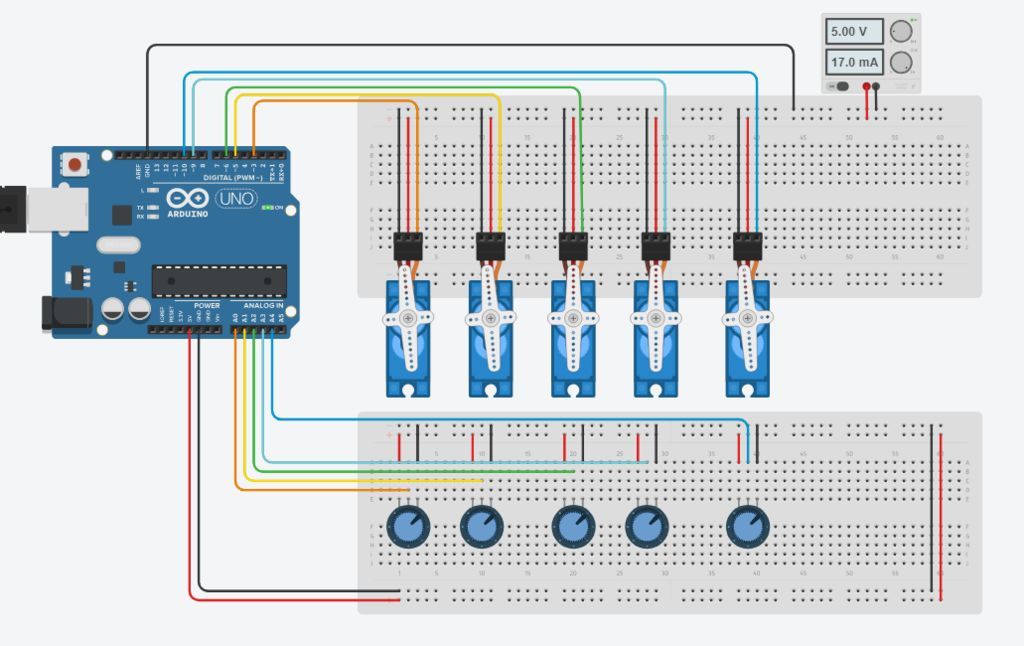
In this step we will make all the necessary connections. Use the picture above as a reference. If you’ve never used a breadboard before, we recommend checking out this article.
First connect all the servos in parallel to the power supply. (The Red wire to +5V and Black or Brown Wire to GND). Next, connect the signal wires i.e Yellow or Orange wire to the PWM pin of the Arduino. Now connect the potentiometers to +5v and GND of Arduino in parallel. Then, connect the middle terminal to Analog pin of the Arduino. We will use Digital Pins 3,5,6,9 & 10 to control the servos Analog Pins A0 to A4 are used for Input from Potentiometers. The servo connected to pin 3 will be controlled by the potentiometer connected to A0. Lastly, the servo connected to pin 5 will be controlled by the potentiometer on A1, and so on….
Click Here For More Information
Pertinent Information 2
Name : Vishesh Pandita Roll No : 1330 Branch : Computer Science Engineering
Swarm Bots
Swarm robotics is a field of multi-robotics in which large number of robots is coordinated in a distributed and decentralized way. The main scientific objective of the Swarm-bots project is to study and aim at controlling the s-bots assemble into structures.Swarm-bot is made of master and slave whereby the master controls the slave using RF module to carry out the desired task.
One Swarm-bot is composed of number of similar robots, called s-bots, physically interconnected. The Swarm-bot is provided with self-assembling capabilities. This project introduces the Swarm-bot with a master and two slaves and describes its application as transportation bot.
The robots in the swarm should have some basic functions-
-
Communication between swarm bots: The Robots in the swarm exchange the information with each other and propagate the information to the whole swarm through autonomous behaviors resulting in the swarm-level cooperation.
-
Avoid collision between swarm robots
-
Synchronization between bots
Master and Slave Bot

How does it work?

Things used in this project
Hardware components
Arduino UNO
1Sheeld
nRF24 module
Photodiode + LED
LV-MaxSonar
Video of working prototype
Pertinent Information 3
Name: Rakshankhan A Kulkarni Roll No: 1352 Branch: E&C
MASTER SLAVE BOT
This is a master slave robotic arm. The microcontroller used is a standard Arduino Uno, It uses PWM signals from the master ARM and converts them to digital signals in the controller which are fed to slave arm. This is a prototype pick and place robot which can be used in automotive industry to assemble many parts of vehicle at once.
 As in the image the master bot does the slave bot also does the same and the master bot makes slave bot to move marker from one place to another.
As in the image the master bot does the slave bot also does the same and the master bot makes slave bot to move marker from one place to another.
 As in this image the slave bot has successfully placed the marker on the other side.
As in this image the slave bot has successfully placed the marker on the other side.
Source:
- https://www.youtube.com/watch?v=O4XgOaa-ESM
- https://www.youtube.com/watch?v=ADJGxOrEZAM
- https://www.youtube.com/watch?v=SK5bpE16xPY
Components used:
- Arudino Nano
- 4 x SG90 Micro Servo Motor
- 4 x Rotary Potentiometer B20K
- Mini Breadoard
Pertinent Information 4
Name : Shreyas Roll No : 1301 Branch : E&C
Robotic Arm
This is a robotic arm actuated by DC Servo motors, driven by an Arduino board. As the master arm is moved, the slave mimics its motion. There is a conveyor belt on which objects travel. When the object is sensed by an IR sensor, the conveyor stops and the Arm comes to pick the object. Sensor detects white and rejects black objects.
Source:
https://www.youtube.com/watch?v=fYnEp42NSl4
COMPONENTS USED: 1 Aurdino mega, 4 Servo motor, 1 Potentiomete,r 1 Remote,