02 Les différents modes - Lactic68/FS22_AutoDrive GitHub Wiki
Les modes de conduite
AutoDrive propose différents modes pour effectuer différentes actions.
1. Conduite 
Dans ce mode, le véhicule se dirigera vers le point le plus approprié (selon sa direction et sa distance actuelle) ou simplement le plus proche puis calculera automatiquement le chemin le plus court entre ce point et la destination sélectionnée afin de s'y rendre en conduite autonome. Il s'agit du mode le plus simple et le mieux adapté pour tester vos nouveaux itinéraires.
2. Livraison 
Dans ce mode, AutoDrive conduira le véhicule comme dans le mode Conduite sauf qu'il effectuera un déchargement s'il détecte une zone de déchargement à proximité immédiate du point de destination. Le point de destination doit être créé légèrement plus loin que la zone de déchargement pour prendre en compte la longueur des remorques afin que le véhicule ne s'arrête pas avant que la remorque soit elle-même dans la zone de déchargement. Le conducteur s'arrêtera à la destination, que la remorque soit vide ou non. Si vous remarquez que votre point de destination n'est pas assez éloigné, vous pouvez facilement bouger le point en mode édition avec un clic droit maintenu sur celui-ci pour le déplacer.


3. Chargement et livraison 
Dans ce mode, vous devez sélectionner 2 destinations cibles : la 1ère est pour le chargement et la 2ème pour le déchargement. Vous devez également sélectionner la marchandise à charger. Si l'AutoDrive est activé, il examine le niveau de remplissage actuel des remorques/appareils connectés. Si cette valeur est supérieure au niveau de "Déchargement à" (voir illustrations ci-dessous), le conducteur se dirige directement vers la destination de livraison. Sinon, il se dirigera d'abord vers la destination de chargement. En fonction de l'option choisie dans le paramètre "Quand le silo est vide" (voir illustration ci-dessous), le conducteur attendra à la destination de chargement que le niveau de remplissage dépasse le niveau de 'Décharger le contenu' ou il continuera vers la destination de déchargement. Dans tous les cas, le conducteur essaiera d'abord de charger le type de remplissage sélectionné sur n'importe quel déclencheur disponible dans une plage juste avant le point de destination du chargement (voir illustration ci-dessous). Vous pouvez également choisir la quantité de boucles à effectuer avant de démarrer le trajet. Si vous réglez ce compteur sur 2, le conducteur s'arrêtera après avoir atteint 2 fois la destination de déchargement. Par défaut, le mode boucle est réglé sur infini.
 Comportement du conducteur tant que le remplissage minimum n'est pas atteint
Comportement du conducteur tant que le remplissage minimum n'est pas atteint
 Seuil de déchargement à partir duquel le conducteur se rendra au point de déchargement
Seuil de déchargement à partir duquel le conducteur se rendra au point de déchargement
 Distance de détection du déclencheur avant d'atteindre le point de destination
Distance de détection du déclencheur avant d'atteindre le point de destination

Choix de la quantité de boucles à effectuer pour le trajet
3.1 Couplage avec le courseplay (CP)
Il y a deux étapes à réaliser dans l'ordre que vous souhaitez pour que votre conducteur puisse travailler dans un champ en suivant le courseplay et ensuite puisse aller se décharger en suivant un trajet Autodrive et revenir dans le champ pour continuer son travail.
Création ou chargement de la course CP
1.Depuis le menu des ouvriers, choisir la création de tâches CP:Travail.
2.Positionner le départ de la course dans le champ souhaité en pointant le curseur dans le champ et en cliquant.
3.Clic gauche pour placer le point de départ dans le champ.
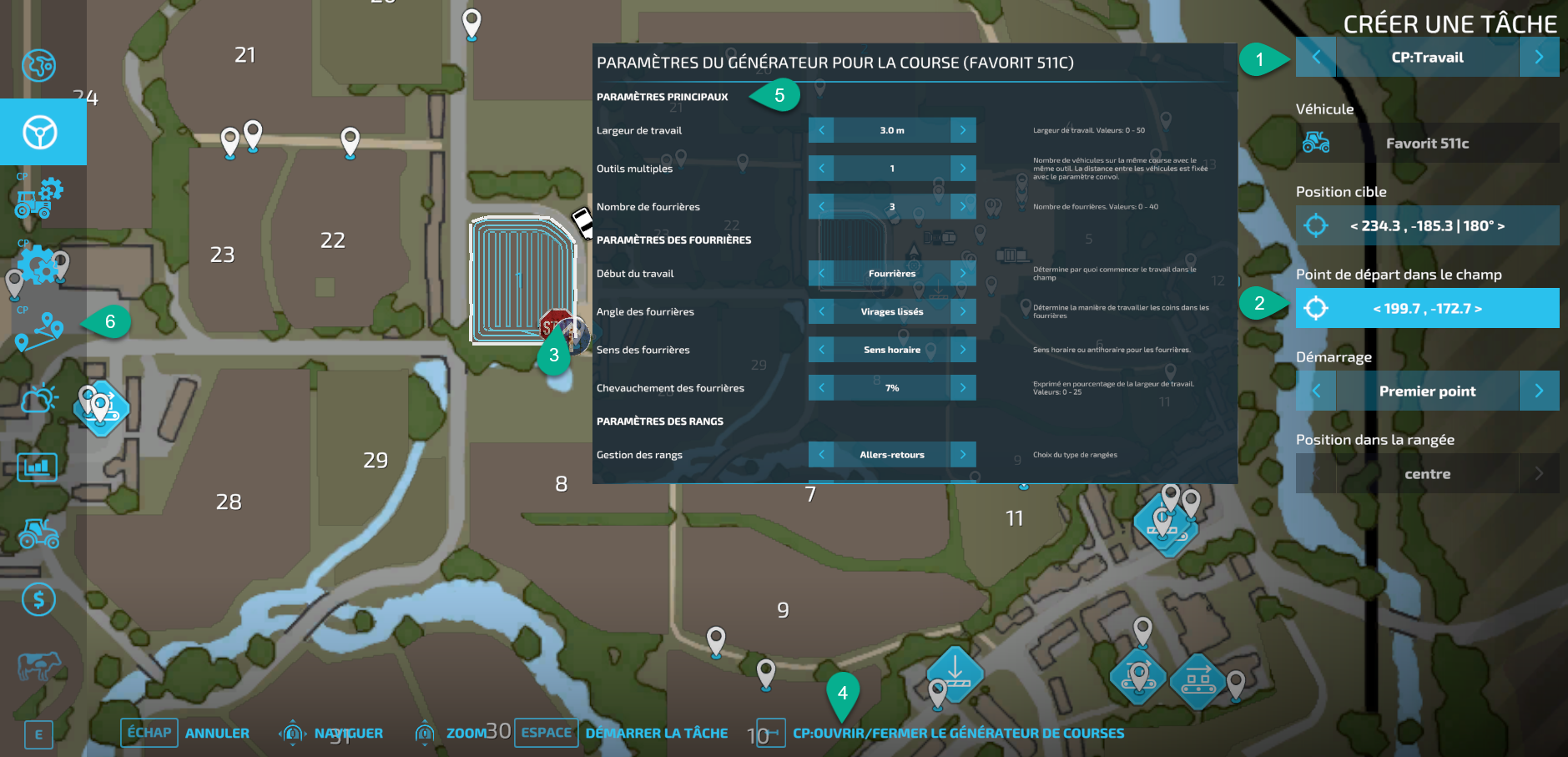
4.Ouvrir le générateur de courses.
5.Choisir vos réglages pour le travail dans le champ.
6.Ouvrir le gestionnaire de course pour enregistrer celle-ci dans un dossier.
Paramétrage du trajet de déchargement Autodrive (AD)
1.Choix du champ où le conducteur devra se rendre.
2.Choix de la destination où se rendre pour se décharger.
3.Choix de la marchandise à charger.
4.Mode chargement et livraison.
5.Activation du dialogue avec le CP. Lorsque AD arrivera au champ désiré, il passera le relai à CP. Lorsque l'autochargeuse sera pleine, CP passera le relai à AD pour effectuer le trajet vers le point de déchargement.
6.Démarrage du trajet avec AD.
 Dans l'exemple ci-dessus, chargez la même course CP que la batteuse et démarrer au premier point.
Dans l'exemple ci-dessus, chargez la même course CP que la batteuse et démarrer au premier point.
4. Chargement (ravitaillement)
Ce mode est très similaire au mode Chargement et livraison décrit précédemment, à quelques exceptions près. Il ne tient pas compte du compteur de boucles et n'effectuera pas de déchargement une fois arrivée à la destination cible. A la place, le conducteur s'arrête et désactive l'AutoDrive. Ce mode est destiné à être utilisé comme mode de remplissage pour les travaux aux champs. Ainsi, les semoirs ou les pulvérisateurs peuvent être utilisés sur le terrain et, lorsqu'ils sont vides, envoyés à un point de remplissage. Une fois remplis, ils reviennent à leur destination cible (le champ où ils avaient commencé leur travail). Ce mode peut également être utilisé en conjonction avec le Courseplay. Il vous suffira d'avoir une course du courseplay chargée et d'activer la communication avec l'autodrive pour que les deux mods travaillent de concert.
4.1 Couplage avec le courseplay (CP)
Il y a deux étapes à réaliser dans l'ordre que vous souhaitez pour que votre conducteur puisse travailler dans un champ en suivant le courseplay et ensuite puisse aller se recharger en suivant un trajet Autodrive et revenir dans le champ pour continuer son travail.
Création ou chargement de la course CP dans le champ
1.Depuis le menu des ouvriers, choisir la création de tâches CP:Travail.
2.Positionner le départ de la course dans le champ souhaité en pointant le curseur dans le champ et en cliquant.
3.Clic gauche pour placer le point de départ dans le champ.
4.Ouvrir le générateur de courses.
5.Choisir vos réglages pour le travail dans le champ.
6.Ouvrir le gestionnaire de course pour enregistrer celle-ci dans un dossier.
Paramétrage du ravitaillement Autodrive (AD)
1.Choix du champ où le conducteur devra se rendre.
2.Choix de la destination où se rendre pour se ravitailler.
3.Choix de la marchandise à charger.
4.Mode chargement uniquement.
5.Activation du dialogue avec le CP. Lorsque AD arrivera au champ désiré, il passera le relai à CP.
6.Démarrage du trajet avec AD.

Désactiver l'achat automatique par les ouvriers
Pour que cela fonctionne, penser à désactiver les achats automatiques par les ouvriers.

5. Déchargement de batteuse/ensileuse 
Dans ce mode, vous devez définir deux destinations. La première doit être un emplacement de champ d'où une moissonneuse active peut être atteinte. La seconde est une destination de déchargement. Il s'agit du premier mode dans lequel les conducteurs AutoDrive sont autorisés à quitter la trajectoire enregistrée et à conduire dans le champ. Ce mode est assez compliqué et implique de nombreux réglages dans le menu des paramètres. Cette documentation décrira donc d'abord le comportement de base, puis expliquera comment les paramètres affectent ce comportement.
5.1 Principes de base
Au démarrage, le conducteur décide s'il doit se rendre au champ ou décharger d'abord (voir Chargement et livraison). Lorsqu'il atteint l'emplacement du champ, il se signale comme étant disponible. Lorsqu'une moissonneuse-batteuse est remplie à 100 % et a déployé sa goulotte, elle passe automatiquement en revue les conducteurs signalés comme disponibles en attente au point de destination du champ et choisit celui qui est le plus proche d'elle. Seuls les conducteurs ayant la même destination que la moissonneuse-batteuse sont acceptés. Il est donc important que votre moissonneuse et vos conducteurs soient sur la même destination de champ dans l'ATH de l'Autodrive.
Important : il n'est pas nécessaire d'activer l'AutoDrive pour la moissonneuse. Vous devez juste vous assurer qu'elle dispose bien du même point de destination sélectionné que les autres conducteurs en attente.

Dans l'exemple ci-dessus, la moissonneuse n'appellera que des conducteurs en attente au point de destination du Champ 01. Il y a d'ailleurs un message d'erreur pour indiquer qu'actuellement aucun conducteur n'est en attente au champ 01.
Vous pouvez également appeler un chauffeur manuellement lorsque vous conduisez vous même la moissonneuse en attribuant le raccourci clavier "Appeler un chauffeur" dans les options du jeu. Si la moissonneuse est contrôlée par le Courseplay, le chauffeur AutoDrive viendra automatiquement lorsque la moissonneuse aura déployé sa goulotte de déchargement. Il est impératif d'activer cette option dans le courseplay.


Lorsque le conducteur est appelé par une moissonneuse, il planifie un chemin vers la sortie de goulotte de celle-ci. Le planificateur de chemin est une implémentation spéciale et ne sera pas détaillé dans cette documentation pour l'instant. Retenez simplement qu'il tient compte des collisions, de l'évitement des cultures, des limites et inclinaisons du champ. Une fois qu'un chemin praticable a été trouvé, le conducteur utilisera celui-ci pour se rendre vers la moissonneuse.
Remarque : Dès que le chauffeur reçoit l'ordre de se rendre à la moissonneuse, le message d'état dans la barre d'information de l'ATH passe de "Attendre moissonneuse" à "Aller à la moissonneuse", ce qui signifie que le planificateur de trajectoire recherche activement un chemin. En fonction des performances de votre processeur et de vos paramètres ('Pathfinder time (max)'), ce processus peut prendre un certain temps et, dans des cas extrêmes, diminuer vos fps. C'est généralement le cas si le chauffeur ne parvient pas à trouver un chemin acceptable vers la moissonneuse-batteuse. Assurez-vous toujours que l'espace devant le conducteur est sans obstacle (et sans cultures) et que le chemin menant à la goulotte de la moissonneuse est également sans collision (par exemple, pas d'arbres ou de cultures juste derrière la moissonneuse).
Lorsque le chauffeur atteint la moissonneuse, il vérifie si le processus de déchargement est terminé ou si la remorque actuelle est remplie. En cas de remorques multiples, le conducteur avance jusqu'à ce qu'il détecte un déchargement de la batteuse dans la remorque suivante. Une fois le déchargement terminé, le chauffeur commence à reculer de quelques mètres pour laisser suffisamment d'espace à la moissonneuse pour continuer à travailler. Ensuite, le chauffeur attendra quelques secondes pour laisser le temps à la moissonneuse de quitter la zone et commencera à planifier son retour au point de départ. Il peut également se garer en plein champ (selon vos paramétrages). Une fois arrivé à ce point, il se signale à nouveau comme étant disponible et attend d'être à nouveau appelé. Si sa remorque est déjà pleine, il se dirigera directement vers la destination de déchargement avant de retourner à l'emplacement du champ.
5.2 Stationnement en plein champ
Si l'option "garer au champ" est activée dans les paramètres d'AutoDrive, le conducteur restera dans le champ après le déchargement de la batteuse. Il se dirigera alors vers une position de stationnement et, une fois ce point atteint, il se signalera à nouveau comme étant disponible.
5.3 Restreindre au champ
Si cette option est activée dans les paramètres, la recherche de chemin disponible sera réduite au champ dans lequel se trouve le véhicule. Cette option devrait permettre au conducteur de rester dans le champ, notamment lors des manœuvres de virage. Important : Si aucun chemin sans cultures ne peut être calculé dans le temps imparti (voir les paramètres), le calculateur de chemin passe en mode de repli et ignore l'écrasement des cultures et les limites du champ !
5.4 Évitement des cultures
Demande au calculateur de chemin d'éviter le plus possible les cultures. Important : Si aucun chemin sans cultures ne peut être calculé dans le temps imparti (voir les paramètres), le calculateur de chemin passe en mode de repli et ignore l'écrasement des cultures et les limites du champ !
5.5 Appel anticipé / Déchargement en mouvement
Ces options peuvent être utilisées pour appeler en avance un chauffeur au-delà d'un seuil de remplissage de la moissonneuse ou décharger la moissonneuse lorsque celle-ci est en mouvement. Lorsque la moissonneuse atteint le niveau de remplissage défini (niveau de préappel), elle appelle déjà le conducteur à son emplacement actuel. Pendant sa venue vers la moissonneuse, le chauffeur détecte si la goulotte de la moissonneuse est déployée. Dès que la goulotte est déployée, le chauffeur calcule un chemin pour venir placer la remorque juste en dessous. Lorsque le conducteur atteint son seuil de déchargement, il commence immédiatement à planifier un chemin vers la sortie du champ sélectionnée (voir les paramètres). Il est donc recommander de régler le niveau à 100% dans ce mode pour éviter qu'il coupe accidentellement la voie à la moissonneuse en voulant rejoindre la sortie du champ.

Ces options AD n'apparaissent que lorsque vous êtes dans une moissonneuse.