2.Gathering Pertinent Information - L-division-2021-2022-Even/Repo-06 GitHub Wiki
| SI. NO | Components or Parts used [Electronics and Mechanical] |
Mechanism/Working principle Identified | Links |
|---|---|---|---|
| 1 | The crawler: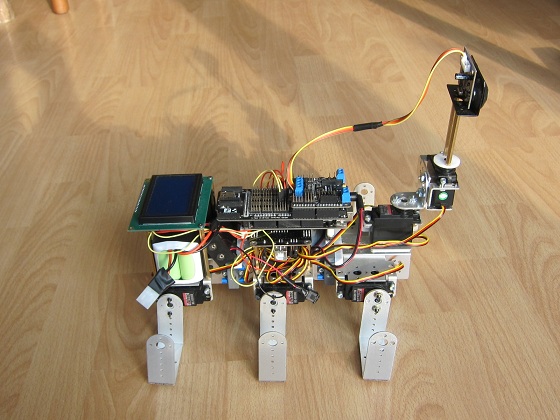 Electronics: Arduino mega 2560,32 Servo controller,Arduino mega IO expansion V2.1,URM04 V2.0 ultrasonic sensor,A LCD display,Eight Hitec 485HB servo,9V battery,6V 6000mah battery. Mechanical:Various aluminum frames and servo brackets. |
When powered on, the robot will do a random walk by first deciding whether to go forward, left or right randomly and then decide how many steps to go in that direction, again, randomly. If the ultrasonic sensor detects an obstacle in front, the robot will stops, and then use the ultrasonic sensor to scan the front 180 degree space to decide the next proper direction to go -- the direction with the most space. | http://se.inf.ethz.ch/people/wei/robots/crawler/crawler.html |
| 2 | WALKING SPIDER ROBOT: Electronics: 1x Arduino Pro Mini,DC-DC(12-5v/3A output),HC-06 Bluetooth module(option),12x SG90 servo(3DOF for 4 legs),1x 3000mhA Li battery,12V Jack,680 Ohm 1/4 watt 5% Resistor,3mm Blue LED, Tactile Switch,Small guage wire. Mechanical: 3D printed parts.[Legs,Body,Hold] |
Stands up, waits 2sec steps forward 5steps,waits 2sec turns right and left and also waves the hands,shakes hand and again sits back. Repeats the same again. |
https://www.instructables.com/DIY-Spider-RobotQuad-robot-Quadruped/ |
| 3 | Arduino Animatronic Eyes: Electronics: 1 - Arduino board, Servo's S3003,Breadboard (anysize) Mechanical: Set of RC Car half shafts,EZ connectors,Servo horns Connecting rod (various sizes and thicknesses),1 - Sheet of Plexiglass/Acryilic Sheet,1 - 12" length of Aluminum Angle Bracket |
Servos move from 0 to 180 degrees moving the rods forward and backward which causes right,left,up and down movements of eye ball mimicking human eyes. | https://www.instructables.com/Arduino-Animatronic-Eyes/ |
| 4 | Arduino insect mimicking bot: Electronics:SparkFun Arduino Pro Mini 328,Ultrasonic Sensor x3,Photodiode x4,Resistor 100k ohm x4, MG90S Metal Geared Micro Servo x5,Portable power Pack 5200mAH(2 Channels:1A, and 2.1A),Toggle switch,USB A connectors x2. Mechanical:Thin metal rod bent or coat hanger. |
Obstacles are avoided by ultrasonic sensors,as the name photovore robot it senses light using photodiodes and moves towards light.Random value generating code in it makes it change its speed and decide to walk or stop randomly. | 1]http://chaoticvoltage.blogspot.com/2016/12/walter-arduino-insect-robot.html 2] https://create.arduino.cc/projecthub/studikasus/walter-the-arduino-photovore-insect-708207 |
| SI.No | Components | About component | Mechanism/Working principle identified | Links |
|---|---|---|---|---|
| 1 | Arduino microcontroller boards | Arduino is an open-source electronics platform based on easy-to-use hardware and software. Arduino boards are able to read inputs - light on a sensor, a finger on a button, or a Twitter message - and turn it into an output - activating a motor, turning on an LED, publishing something online. You can tell your board what to do by sending a set of instructions to the microcontroller on the board. To do so you use the Arduino programming language (based on Wiring), and the Arduino Software (IDE), based on Processing. | Arduino boards have microcontroller(ATmega8, ATmega168, ATmega328, ATmega1280, or ATmega2560) which can read digital and analog signals from sensors and can give out signals to the output devices connected to them. | https://www.arduino.cc/en/Guide/Introduction |
| 2 | Servo motors | A servomotor is a linear actuator or rotary actuator that allows for precise control of linear or angular position, acceleration, and velocity. It consists of a motor coupled to a sensor for position feedback. It also requires a relatively sophisticated controller, often a dedicated module designed specifically for use with servomotors. | A servo motor is an electromechanical device that produces torque and velocity based on the supplied current and voltage. A servo motor works as part of a closed loop system providing torque and velocity as commanded from a servo controller utilizing a feedback device to close the loop. The feedback device supplies information such as current, velocity, or position to the servo controller, which adjusts the motor action depending on the commanded parameters. | https://www.electrical4u.com/what-is-servo-motor/ |
| 3 | Sensors | sensors are the electronic devices which can sense some real world quantity and interpret the quantity sensed in the form of electrical signals so that microcontrollers can work on those quantities. A sensor is a device that detects the change in the environment and responds to some output on the other system. A sensor converts a physical phenomenon into a measurable analog voltage (or sometimes a digital signal) converted into a human-readable display or transmitted for reading or further processing. |
Sensors are of many kinds such as ultrasonic sensors, IRsensors,pressure sensors etc All these work by some physics principles and phenomenons which help these sensors to convert physical quantities to electrical signals. | https://dewesoft.com/daq/what-is-a-sensor |
| 4 | Batteries | Batteries are the power supply devices which store electric energy and can supply when needed. | Batteries convert chemical energy into electrical energieshttps://www.qrg.northwestern.edu/projects/vss/docs/power/1-what-are-batteries.html | |
| 5 | Connecting wires | Connecting wires allows an electrical current to travel from one point on a circuit to another because electricity needs a medium through which it can move. Most of the connecting wires are made up of copper or aluminum. | Electricity flows in metals like copper..by the movement of electrons | https://brainly.in/question/14626679#:~:text=Connecting%20wires%20allows%20an%20electrical,up%20of%20copper%20or%20aluminum. |
| 6 | DC motors | A DC motor or direct current motor is an electrical machine that transforms electrical energy into mechanical energy by creating a magnetic field that is powered by direct current. | When a DC motor is powered, a magnetic field is created in its stator. The field attracts and repels magnets on the rotor; this causes the rotor to rotate. | https://www.iqsdirectory.com/articles/electric-motor/dc-motors.html |
| 7 | Bluetooth HC-05 |
HC 05 Bluetooth is a wireless communication protocol; it is used in two devices as a sending and receiving the information. The Bluetooth is free to use in the wireless communication protocol as the range of the Bluetooth is less than the other wireless communication protocols like WiFi and Zigbee. The Bluetooth operates at the frequency of the 2.41 GHz and also used in many small ranges of applications. | Bluetooth module sends or receives information by electromagnetic waves which are produced by the oscillations of the electric current. | https://www.edgefxtech.com/blog/interfacing-hc-05-bluetooth-module-with-microcontroller/ |