8.Sprint 2 - L-Division-2018-2019/repo2 GitHub Wiki
BUILDING PHASE
SUBSYSTEM 2 (collecting waste and transfer of waste)
Fabrication plan
Trash box and shovel are made up aluminum sheet.
shovel is fixed to the chassis with the help of hinge.Two aluminum angles are fixed on the chassis with the help of l clamps.Holes are drilled on top of both the aluminum angles to fix DC motors. Two holes are drilled at the end of the shovel to connect DC motors with shovel.
DC motors and shovel are connected by thread on both sides. shovel can move up and down by the rotation of Dc motors in clockwise and anticlockwise direction. This is controlled by the bluetooth app.
Interaction aspect details
If the DC motors connected to the aluminum angle rotate in anti clock wise direction the shovel will move up and when the DC motors rotate in clockwise direction shovel will move down according to directions given by bluetooth app.hence by this shovel picks the waste and pass the waste to trash box.
Program
void setup() {
Serial.begin(9600);
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
}
void loop() {
char data=Serial.read();
if(data=='1')
{
digitalWrite(2,HIGH);
digitalWrite(3,LOW);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
}
if(data=='2')
{
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
}
if(data=='3')
{
digitalWrite(2,LOW);
digitalWrite(3,LOW);
digitalWrite(4,LOW);
digitalWrite(5,LOW);
}
}
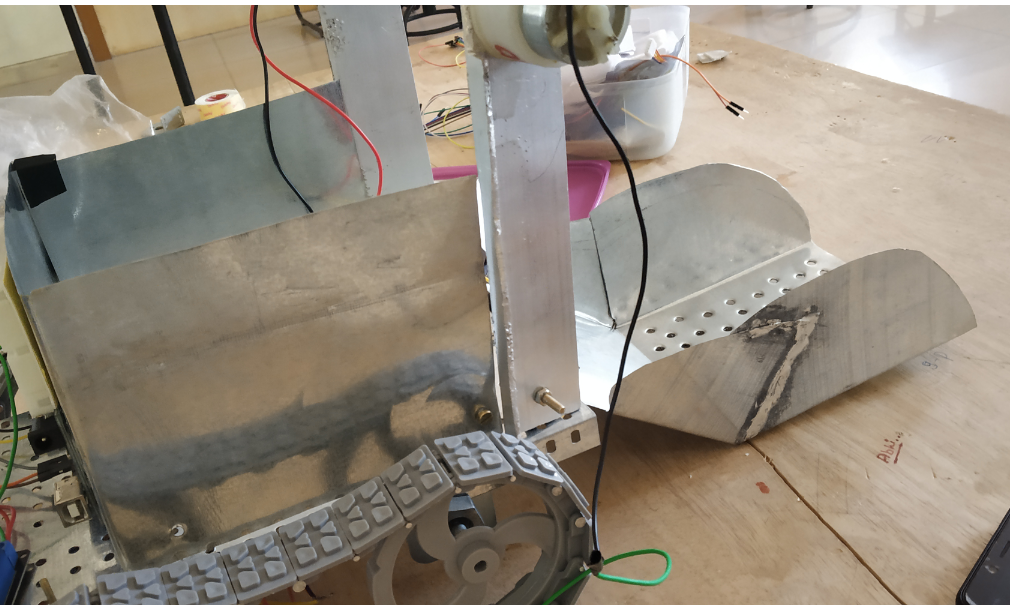
Built subsystem photo
TESTING PHASE
Functionality Test Report
We tested the subsystem 2 that is picking of waste and transfer of waste to trash box using bluetooth app. Once the power is on we pressed the up button,the shovel started moving up and it passed the waste present on it to the trash box. until we press the stop button it will be moving up only. After this we pressed the down button the shovel started moving down until stop button is pressed. By the end of this testing phase our machine is able to pick the waste and was able to pass the waste to trash box by the movement of shovel.