4. Concept Selection and Product Architecture - L-Division-2018-2019/repo2 GitHub Wiki
List of Objectives-
1)Picking Ability 2)Ease of use 3)Ability to load 4)Cost 5)Use of standard parts
Weightage assigned to the Objectives:
| Objectives | Weightage |
|---|---|
| Picking ability | 9 |
| Ease of use | 8 |
| Ability to load | 7 |
| Cost | 7 |
| Use of standard parts | 6 |
PUGH Chart
| Objectives | Design Idea 1 | Design Idea 2 | Design Idea 3 | Design Idea 4 |
|---|---|---|---|---|
| Picking ability | - | Datum | 0 | - |
| Ease of use | 0 | Datum | 0 | 0 |
| Ability to load | 0 | Datum | 0 | - |
| Cost | + | Datum | 0 | -- |
| Use of standard parts | 0 | Datum | - | - |
| Score(+) | 7 | 0 | 0 | 0 |
| Score(-) | 9 | 0 | 6 | 36 |
| Total | -2 | 0 | -6 | -36 |
Justification
1)Design 1
| Objective | Score Given | Justification |
|---|---|---|
| Picking ability | - | As it is only two clawed its radius of picking objects is less |
| Ease of Use | 0 | It is used with a remote just like other designs |
| Ability to Load | 0 | It can load as much as the datum |
| Cost | + | It uses minimal parts as compared to others therefore cost efficient |
| Use of Standard Use | 0 | All the parts used in this design are easily available as compared to the datum |
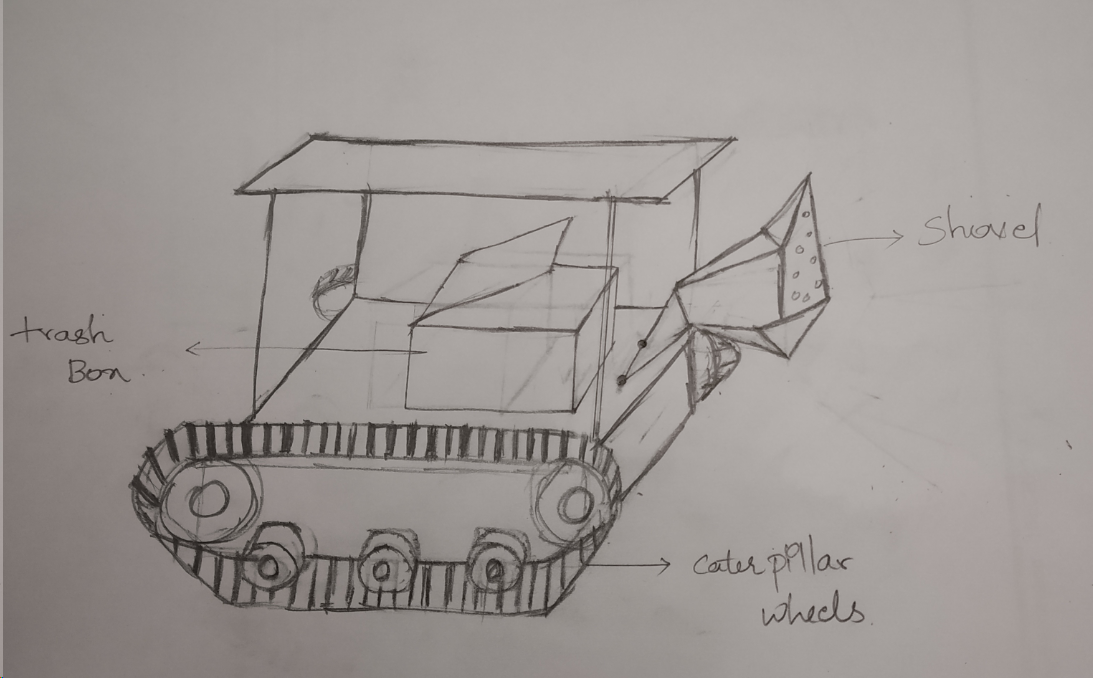
2)Design 2
| Objective | Score Given | Justification |
|---|---|---|
| Picking ability | 0 | Datum |
| Ease of Use | 0 | Datum |
| Ability to Load | 0 | Datum |
| Cost | 0 | Datum |
| Use of Standard Use | 0 | Datum |
3)Design 3
| Objective | Score Given | Justification |
|---|---|---|
| Picking ability | 0 | It has a big metal claw picking up objects so it is pretty same as the shovel design |
| Ease of Use | 0 | It is remotely used just as other designs |
| Ability to Load | 0 | It has the same box as the datum so same amount materials can be stored |
| Cost | 0 | As we are not using very much different materials from the datum it is almost same as it is |
| Use of Standard Use | - | Metals claws are not readily available we will have to make it using single metal claw by joining with others |
4)Design 4
| Objective | Score Given | Justification |
|---|---|---|
| Picking ability | - | Its metal claws are smaller than the other designs |
| Ease of Use | 0 | Remotely controlled same as other designs |
| Ability to Load | - | We have to use an external bag in order to store the waste |
| Cost | -- | Robotic legs are very costly compared to the other wheels |
| Use of Standard Use | - | As robotic legs are difficult to get it is not recommended |
The Best Concept Selected is Design Idea 2.
Clustering of Functions and Sub-Functions into Sub-System in a Functional Tree
Identified List of Sub-Systems:
1)Movement 2)Collection of the Waste
Functional Tree v/s Component Hierarchy
System Interaction Details table
1.Sub-System 1 movement
| Interactions | Sub System 2collection of waste |
|---|---|
| Energy interaction | NO |
| Data interaction | YES |
| Material interaction | YES |
| Spatial interaction | YES |
2.Sub-System 2collection of waste
| Interactions | Sub System 1movement |
|---|---|
| Energy interaction | YES |
| Data interaction | NO |
| Material interaction | YES |
| Spatial interaction | YES |