Sprint 1 - L-Division-2018-2019/repo11 GitHub Wiki
Building phase:-
Subsystem name: moment and levelling
Things required:
- Foam sheet - 10mm thickness 25 * 5 inches(2), 18 * 5 inches(2)
- Metal sheet - 18 * 10 inches
- screws and nuts - 8 - 100mm
- L clamps - 4
- Wheels - 4 - 12V - 10rpm
- DC motors - 4
Process:-
The foam sheet is cut into 2 pieces of size 25 * 5 inches each and another 18 * 5 inches each to build the base. The foam sheet of size 25 * 5 inches size forms the base length to which holes of diameter 5mm are drilled at the end side of the sheets in order to fix the DC motors to which wheels are attached. The foam sheet which is cut into 2 pieces of size 18 * 5 inches forms the base width.The metal sheet is cut into the size of 18 * 10 in order to build the leveller .
Subsystem integration:-
One 1st base length piece and the other 1st base width piece are joined together by using L clamps, that 1st base width is joined with the another 2ndbase length piece using Lclamps,Finally the remaining 2nd base width piece is joined with the 1st base length piece and 2nd base length piece. The metal sheet is attached at the back end of the base with hot glue.
Arduino Code
-
if(Serial.available()){
-
t=Serial.read();
-
Serial.println(t);
-
}
-
if(t=='1'){//move forward
-
digitalWrite(13,HIGH);
-
digitalWrite(12,LOW);
-
digitalWrite(11,HIGH);
-
digitalWrite(10,LOW);
-
}
-
else if(t=='2'){//move reverse
-
digitalWrite(13,LOW);
-
digitalWrite(12,HIGH);
-
digitalWrite(11,LOW);
-
digitalWrite(10,HIGH);
-
}
-
else if(t=='3'){//turn right
-
digitalWrite(13,LOW);
-
digitalWrite(12,LOW);
-
digitalWrite(11,HIGH);
-
digitalWrite(10,LOW);
-
}
-
else if (t=='4'){//turn left
-
digitalWrite(13,HIGH);
-
digitalWrite(12,LOW);
-
digitalWrite(11,LOW);
-
digitalWrite(10,LOW);
-
}
-
else if(t=='5'){//stop
-
digitalWrite(13,LOW);
-
digitalWrite(12,LOW);
-
digitalWrite(11,LOW);
-
digitalWrite(10,LOW);
-
}
-
delay(100);
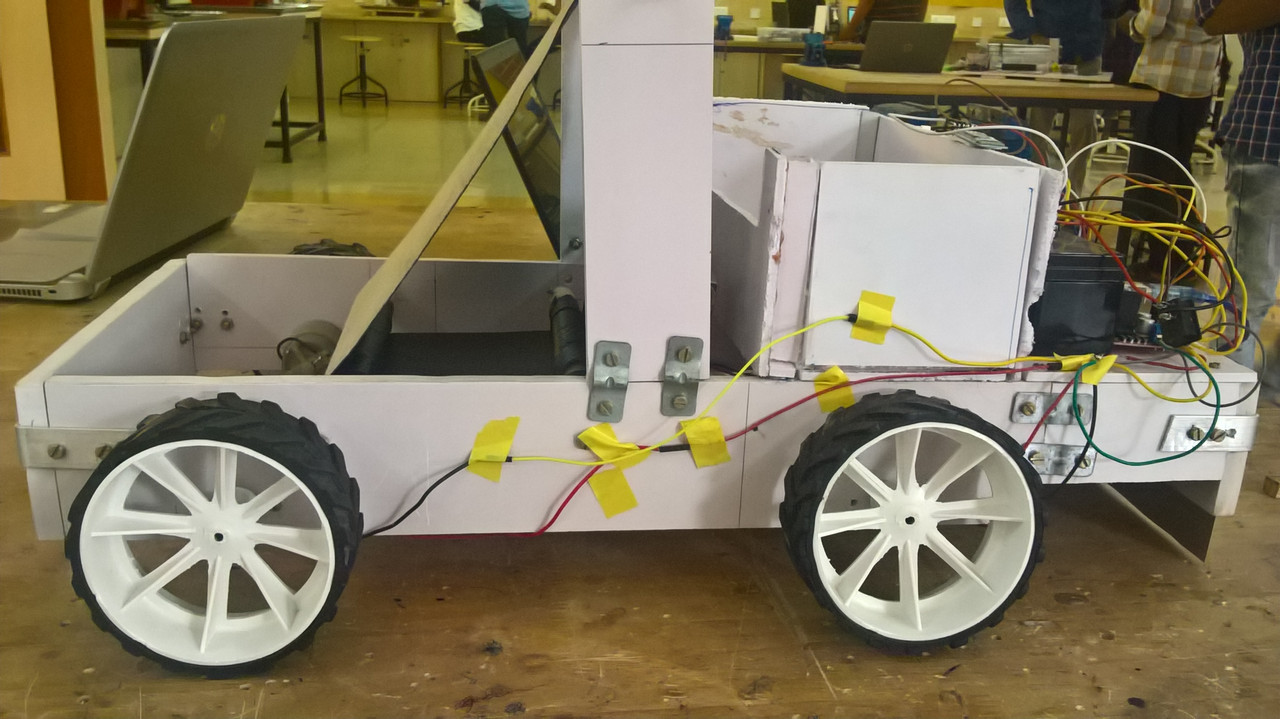
Image of sprint-movement and levelling
system interaction:-
- Data interaction:From Arduino to DC motors to move the bot.
- Material interaction:-
- Energy interaction:Electrical energy to mechanical energy.
Testing phase:-
The two DC motors are controlled by the bluetooth module.To move the bot to the front,all the wheels rotate towards the front side,to move back all the wheels rotate towards back ,to move left only the right side wheels rotate and to move right only the left side wheels rotate.As the bot moves ,the metal sheet attached at the rear end will sweep the sand and convert the uneven sand surface as smooth sand surface.