Conceptual Design - L-Division-2018-2019/repo11 GitHub Wiki
Problem definition
Design a robot which can collect the wastes like plastic, organic and wet materials on the surface of sand, which should be safe enough to use and it should be portable. The robot should not exceed the cost of 5000 rupees, which can work for at least 3 hours when fully charged, it can be controlled by an individual and the robot is controlled by wireless means like Bluetooth .The device should destroy the litter collected,the wireless connection should have a wide range of 10 meters and it should create an even level surface of sand at the end of cleaning.
1. Black Box representation
| INPUT | OUTPUT |
|---|---|
| 1)Electrical Energy | Mechanical work |
| 2)Data | Build wireless connection |
| 3)Garbage | Destroyed and compressed Garbage |

2.List of main functions of a system
-
Build a wireless connection between robot and the controller.
-
Collection of the litter from the shore of the beach.
-
Destroy the waste collected in the robot.
-
Make a even level surface of sand after collecting the garbage.
5)After the garbage collector is filled the machine will indicate the user by blinking an led light.
3.Functional tree

4.User Interaction-System Behavior table
4.1 Building Wireless connection
| Steps | User action | System Behavior |
|---|---|---|
| 1). | Switch on the batteries of both mobile and robot | |
| 2). | Sending signal | |
| 3). | Accept the signal | |
| 4). | Confirm the signal | |
| 5). | Wireless connection built |
4.2 Collecting the Garbage
| Steps | User action | System Behavior |
|---|---|---|
| 1). | Send the signal to switch on the machine | |
| 2). | Accept the signal sent | |
| 3). | Confirm the signal received | |
| 4). | Start collecting the trash | |
| 5). | Send the signal for motion of the machine | |
| 6). | Accept the signal sent | |
| 7). | Confirm the signal received | |
| 8). | Collection of the garbage and sent to destruction box | |
| 9). | Send the signal to switch off the trash cleaning machine | |
| 10). | Accept the signal sent | |
| 11). | Confirm the signal received |
4.2 Destruction of the Garbage
| Steps | User action | System Behavior |
|---|---|---|
| 1). | Send the signal to switch on the machine for crushing | |
| 2). | Accept the signal sent | |
| 3). | Confirm the signal received | |
| 4). | Revolving of crushing | |
| 5). | Destruction of the trash | |
| 9). | Send the signal to switch off the machine of crushing | |
| 10). | Accept the signal sent | |
| 11). | Confirm the signal received | |
| 12). | Blink the light once the garbage bin is full | |
| 13). | Remove the Garbage manually |
5.Glass box represntstion

6.Morphological chart
| Functions | Means | Means | Means |
|---|---|---|---|
| 1)Motion of the machine | Using conveyor belt mechanism  |
Triangle wheels  |
Wide tyres |
| 2)Collection of trash | Using Conveyor belt  |
Using mesh connecting it to machine  |
Using vaccum cleanner  |
| 3)Wireless connection | Bluetooth connection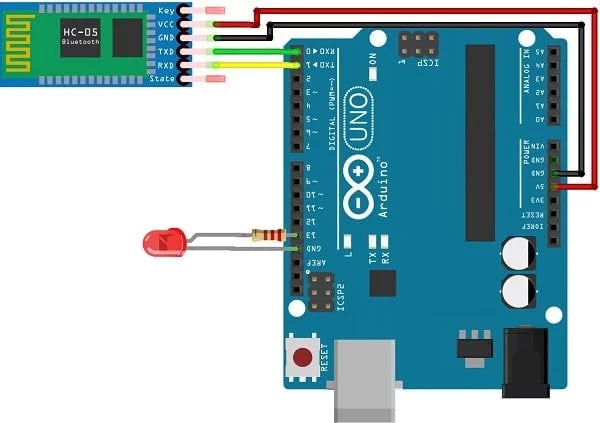 |
R.F Control |
Hand jesture mechanism  |
| 4)Destroying Waste | Using blades |
Using Crushers |
Using garbage compactor |
7.Concepts
| Desgins | Wireless connections | Collection of garbage | Destruction of garbage |
|---|---|---|---|
| 1)Design 1 | Using bluetooth | Using Conveyor belt | Using Compressing machine |
| 2)Design 2 | Using R.F Control | Using Mesh | Using Sharp Blenders |
| 3)Design 3 | Using Bluetooth | Using Mesh | Using Compressing Machine |
| 4)Design 4 | Using R.F Control | Using Coneyor belt | Using sharp Blades |
Desgin 1.

Design 2.

Desgin 3.

Design 4.
