1.PERTINENT INFORMATION - K-Division-2020-21-Even/Repo-08 GitHub Wiki
SHAPE SHIFTING
Aim: The aim of this project is to develop a shape shifting machine/model.The objective is to build a Clock that transforms itself into another or changes its shape to another form.
What is Shape shifting?
It is Basically a process of transforming or Morphing a simple object to another object by using mechanisms of various kinds and using engineering to do so.It is in simple words a model/machine which can change its original shape. Mechatronics is usually the branch of engineering that deals with the machines with programming, electrical and mechanics .So the shape shifting is a Mechatronic model, sometimes simple shape shifters are kinetic models and complex are mechatronic like machines used for Space Exploration.
Need Statement
The need statement was Decorative and our subtheme is Shape shifting .An important aspect of of successful model is the movement of the parts used for shape shifting, the model should change its shape such that it should retain its original position/shape whenever desired by the user without any flaws.
Tools or different aspects on Shape shifting
As we enter the age of designer matter , where objects can morph and change shape on command or what tools do we need to create shape-shifting structures? At the heart of an elastic deformation is the combination of dilation and distortion or stretching and bending. The competition between the latter can cause elastic instabilities, and over the last fifteen years, these instabilities have provided a multitude of ways to prescribe and control shape change. Buckling, wrinkling, folding, creasing, and snapping have become mechanisms that when harmoniously combined enable mechanical metamaterials, self-folding origami, ultralight and ultrathin kirigami , and structures that appear to grow from one shape to another.
Shape Shifting Robots
Most robots can change directions, speeds – some can even change their colors. But what about changing their shapes? Researchers are beginning to create robots that can adapt their morphology and behaviors on demand. By changing both the body shape and the way it moves can help the robot overcome obstacles or continue task performance despite changing terrains and environments.
As with so many engineering designs, biology's blueprints serve as inspiration: Biological organisms are able to adjust their body structure, stiffness, and behavior toward a complex anatomy that accommodates a variety of environmental demands and external perturbations.
For example, octopuses can squeeze through apertures that are much smaller than their body; hydrostatic caterpillars use peristaltic shape change to locomote across numerous environments; and moth larvae have been observed to curl up to roll away from predators.
Moreover, biological bodies are often highly regenerative, and able to repair and reconfigure their large-scale architecture in the face of significant damage or radical changes to their components. For example, salamanders, octopuses, shrimp and starfish regenerate amputated limbs, and fragments cut from arbitrary portions of planaria flatworms can rebuild (and rescale) their bodies to recover a full, correct anatomy.
"Evolution did not result in hard-coded body plans purely determined by genetic factors, but rather produced diverse examples of intelligent self-modifying systems which adapt to numerous extragenomic influences," write the authors of a recent progress report in Advanced Materials ("Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization"). "In this way, biology serves as an important proof-of-principle, and design challenge, for artificial intelligence and shape changing robots."
One of the key differentiators between biological and artificial systems is the dynamic plasticity of living tissues, enabling adaptation to different environmental conditions, tasks, or damage by reconfiguring physical structure and behavioral control policies. Lack of dynamic plasticity is a significant limitation for artificial systems that must robustly operate in the natural world. Recently, researchers have begun to leverage insights from regenerating and metamorphosing organisms, designing robots capable of editing their own structure to more efficiently perform tasks under changing demands and creating new algorithms to control these changing anatomies. Here, an overview of the literature related to robots that change shape to enhance and expand their functionality is presented. Related grand challenges, including shape sensing, finding, and changing, which rely on innovations in multifunctional materials, distributed actuation and sensing, and somatic control to enable next-generation shape changing robots are also discussed.
Are shape-shifting robots the future?
A shape-shifting quadruped
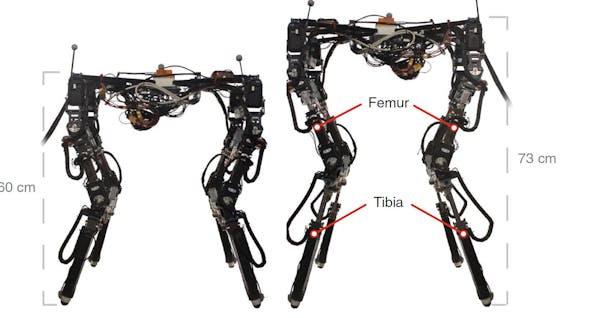
DyRET, the Dynamic Robot for Embodied Testing, or “the animal” A shape-shifting quadruped. Tønnes Nygaard, was designed to explore the idea of a shape-shifting robot. Each of DyRET’s four legs has two telescopic sections, so that it can change the length of its thigh or shin bones. The adjustments are made by motors built into the legs and the lengths can be changed automatically while the robot is operating.
The motors can change the height of DyRET by around 20%, from 60cm to 73cm tall. That 13cm makes a dramatic difference to the robot’s walk. With short legs, DyRET is stable but slow, with a low centre of gravity. In its tallest mode, DyRET is more unstable while it walks but its stride is much longer, allowing it to travel faster and to step over obstacles.
DyRET also has sensors to keep track of what it’s walking on. Each of DyRET’s feet has a force sensor that can feel how hard the ground is. A 3D camera points at the ground between DyRET’s front legs to estimate how rough the ground is.
DyRET explores the idea of “embodied cognition” in a robot: that is, that a robot’s hardware body can be used to solve problems in collaboration with its software brain by tightly linking them to the environment. Instead of DyRET’s body being a constraint on its movement, it is itself an adaptive way of solving problems in challenging environments.
This is incredibly beneficial, especially when we can’t predict the exact environmental conditions beforehand, which makes picking a single “good” robot shape very challenging. Instead, these robots would adapt to a wide variety of environmental conditions through shape-change.
Our proof of concept has powerful implications for the future of robotic design, unlocking currently impossible environments that are very challenging and variable. Future shape-shifting robots might be used on the sea floor, or for long-term missions in space.
NASA Designing Shapeshifting Robots for Saturn's Moons


NASA is testing a Transformer-like new robot, Shapeshifter, capable of morphing into multiple configurations. A similar design could one day be used to explore Saturn's moon Titan.
Current status: NASA’s Jet Propulsion Laboratory is now testing a 3D-printed prototype of Shapeshifter. It “looks like a drone encased in an elongated hamster wheel,” according to NASA. It can split into two halves that use small propellers to float through the air like drones.
The future: The fully realized version of Shapeshifter would be a “mothercraft” lander that carries a collection of 12 mini robots (“cobots”) to the surface, acts as the main power source, and uses a suite of scientific instruments that can directly analyze samples. The cobots could work together to carry and move the mothercraft to different areas. They would be able to operate individually or as one cohesive unit, in order to adapt to a variety of terrains and environments.
For example, the cobots would be able to separate and fly out in different directions or together as a flock, link up together like a barrel of monkeys in order to explore narrow caves and caverns, or even float on or swim in liquid.
Why do we need it: More recent investigations of the Saturnian system (thanks in great part to the Cassini mission) have taught us lots about the surface and atmosphere of Saturn’s moons. Titan is an especially alluring target: it has deep lakes of liquid methane and ethane, and its hazy atmosphere suggests it might have active geological features like icy volcanoes that erupt water or ammonia. All this raises hopes that it might have ingredients that are amenable to life.
**Will it launch soon? No, afraid not. If testing goes well, NASA might very well greenlight Shapeshifter for a real mission, but this is still a long, long way off in the future. At the very least, these tests might inspire new designs for other future extraterrestrial.
New shape-shifting metals discovered
A new shape-changing metal crystal is reported in the journal Nature, by scientists at University of Minnesota.It is the prototype of a new family of smart materials that could be used in applications ranging from space vehicles to electronics to jet engines.Called a "martensite", the crystal has two different arrangements of atoms, switching seamlessly between them.It can change shape tens of thousands of times when heated and cooled without degrading, unlike existing technology.Currently, martensite metals are made of an alloyed mixture of nickel and titanium.
They have the remarkable ability to "remember" their shape and even after being bent will return to their original form. For this, they are called "shape memory" metals.They have been used in spectacle frames and brassiere wires, but also in surgery as frameworks for shaping healing bones, and as "stents" for holding heart arteries open.Martensite metals change shape when heated or cooled through a certain temperature, when the atoms that make up their structure rearrange themselves in a sudden transformation. Some call this a "military transformation" because the rows of atoms that make up the metal crystal click into their new shape in an orderly manner.The transformation means that martensite can be used in smart mechanisms that respond to temperature change.Examples include automatic windows-openers in glasshouses, a means for automatically guiding solar panels to point at the Sun on the Hubble Space Telescope, and, very recently, a proposed use in the Boeing 787 Dreamliner to morph the trailing edge of the engine cowling, making it quieter when it runs hot on take-off."The pitfall of current martensites is that after repeated shape changes, they build up stresses inside that degrade them and eventually break them apart. The new alloy, made of a mixture of zinc, gold and copper, changes back and forth almost indefinitely with little internal damage, opening up a new range of applications for these types of "active materials".The aim is now to apply the lessons learned from the new metal to make a family of ceramic solids that can also be shape-switched back and forth."The real advance is to make the transformations reversible that could be applied in many situations" explains Prof Richard James, one of the authors of the study."You could make devices that convert heat to electricity directly. They could use the waste heat from computers and cell phones to recharge the battery and make them more efficient." As the material cycles through its different atomic arrangements, crystals can be seen at its surface in ever-changing patterns, looking like microscopic rivers. The structures fit together without any stress layers between them, and this seems to be the key to their longevity and potential.The new materials could also be used in improved and efficient microelectromechanical systems - energy harvesting devices, in which small vibrations can be converted directly into power.These sorts of gizmos are already used in tyre pressure-monitoring systems in cars to power the electronics in the sensors.
Morphing in nature and beyond
Shape-changing materials open an entirely new solution space for a wide range of disciplines: from architecture that responds to the environment and medical devices that unpack inside the body, to passive sensors and novel robotic actuators. While synthetic shape-changing materials are still in their infancy, studies of biological morphing materials have revealed key paradigms and features which underlie efficient natural shape-change. We focus on soft matter due to its prevalence in nature, compatibility with users and potential for novel design. Initially, we review examples of natural shape-changing materials—skeletal muscle, tendons and plant tissues—and compare with synthetic examples with similar methods of operation. Stimuli to motion are outlined in general principle, with examples of their use and potential in manufactured systems. Anisotropy is identified as a crucial element in directing shape-change to fulfil designed tasks, and some manufacturing routes to its achievement are highlighted. We conclude with potential directions for future work, including the simultaneous development of materials and manufacturing techniques and the hierarchical combination of effects at multiple length scales.
There are many machines/models being invented or made such as to make human life easier ,interesting and advanced. Many engineers and scientists are working on different type of shape shifting objects which may help world be a better place .
Reference:We referred through these amazing articles using Google Scholar and made our introduction of pertinent information
1)https://www.sciencedirect.com/science/article/abs/pii/S1359029418300839
2)https://onlinelibrary.wiley.com/doi/10.1002/adma.202002882
3)https://www.nanowerk.com/spotlight/spotid=56326.php
5)https://www.bbc.com/news/science-environment-24400101
6)https://link.springer.com/article/10.1007/s10853-016-0295-8