Week 4 part 2 - JakJak7/Lego2014 GitHub Wiki
Date: 24/2 2014
Duration: 14-16
Group members: Henrik, Jakob
Exercise 6:
Goals:
Get the robot to follow sounds.
Plan:
- First: add a second sound sensor right next to the first one, and calibrate these to ensure they read the same values.
- Make the sensors point away from each other, left and right, and get the robot to estimate the position of a sound source by looking at readings from both sensors.
Results:

Our calibration setup
From the calibration, we see that one sensor measures higher values than the other. We tried using a phone speaker to increase the volume of a static buzz noise, to get a nice, hopefully linear graph.
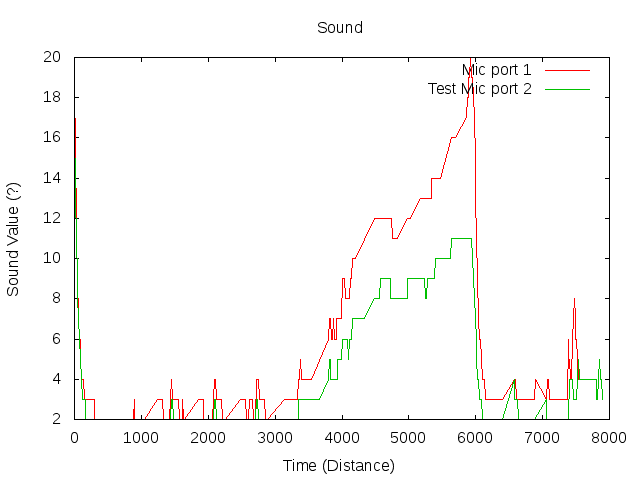
This difference isn't constant, and doesn't appear to be linear either. It differs from volume to volume, and it's not easy to make a function for.
The deviation is quite unpredictable. In the end we tried to even out the read values by subtracting a value from one of the sensor values, and then multiplying both by a factor to make it more sensitive to sounds.

Final build, with sensor pointing away from each other
Video of sound direction control
Conclusion:
We managed to get the robot to follow sounds so-so. The results were highly inconsistent, and the video linked is the best attempt we had. We did the tests in a tiny room, perhaps the readings would have been better if we were in more open area, with less echoing.