Useful Commands - Insper/insperbot GitHub Wiki
Frequently used commands.
🕹️ To Bringup your Virtual InsperBot on Gazebo
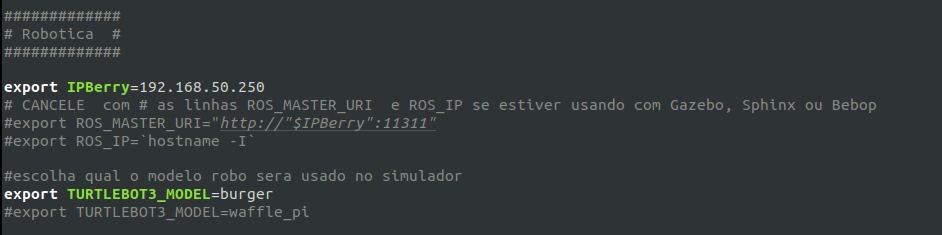
Open your robotica.sh file
gedit ~/robotica.sh
Make sure that these lines are commented out as in the picture below:
🚚 Run one of the available Scenarios
Open a new terminal with Crtl + Shift + T and run:
roslaunch insperbot burger_4_andar.launch
roslaunch insperbot caixas.launch
roslaunch insperbot circuito.launch
roslaunch insperbot corredor.launch
roslaunch insperbot corrida_de_obstaculos.launch
roslaunch insperbot cruzamento.launch
roslaunch insperbot encaixotado.launch
roslaunch insperbot forca.launch
roslaunch insperbot forca_random.launch
roslaunch insperbot formas.launch
roslaunch insperbot labirinto.launch
roslaunch insperbot mesa.launch
roslaunch insperbot pista_s2.launch
roslaunch insperbot pista_u.launch
roslaunch insperbot retangulos.launch
roslaunch insperbot salinha.launch
roslaunch insperbot zig-zag.launch
🎮 To Enable gripper control
roslaunch insperbot arm_control.launch
How to control the robot’s gripper
Arm (joint1):
To up:
rostopic pub -1 /joint1_position_controller/command std_msgs/Float64 "data: 1.5"
To Forward:
rostopic pub -1 /joint1_position_controller/command std_msgs/Float64 "data: 0"
To Down:
rostopic pub -1 /joint1_position_controller/command std_msgs/Float64 "data: -1.5"
Gripper (joint2 and joint3)
To close the gripper:
rostopic pub -1 /joint2_position_controller/command std_msgs/Float64 "data: 0"
To open the gripper:
rostopic pub -1 /joint2_position_controller/command std_msgs/Float64 "data: -1"
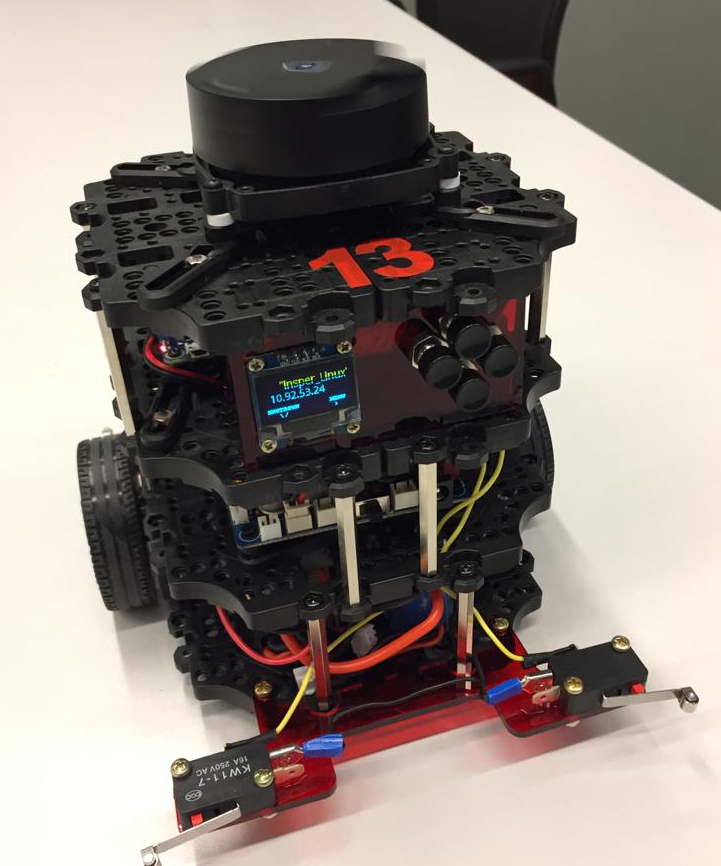
🤖 To Bringup your Real InsperBot
Find the IP Adress and Network avaliable on display of your InsperBot, connect in the same network.
Uncommenting the corresponding lines in your robotica.sh, update the IP Adress and save.
gedit ~/robotica.sh

Finally, the bring up:
On your PC, open a new terminal and:
Call a roscore
roscore
A nother one:
roslaunch turtlebot3_bringup turtlebot3_remote.launch
To teleop:
roslaunch turtlebot_teleop keyboard_teleop.launch
To open the camera:
rqt_image_view
To list the available topics :
rostopic list
To access some specific topic:
rostopic echo topic_here