2. PERTINENT INFORMATION - I-div-Even-2021/Repo-12 GitHub Wiki
PERTINENT INFORMATION GATHERING
INTRODUCTION:
A pick-and-place robot is a mechatronic system used to automate the process of picking up objects and placing them onto a surface in a set position and orientation.
PRODUCT 1
 [1]
[1]
PRODUCT 2
 [2]
[2]
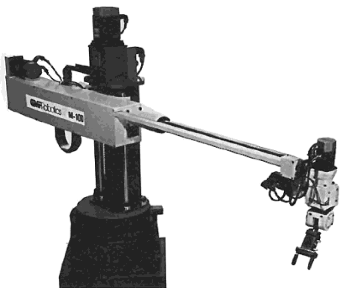
Pneumatic robot are different from other robots with hydraulic systems or electric motors in that they receive locomotion from compressed air rather than from electrical mechanical energy or hydraulic fluid. [10]
PRODUCT 3
 [3]
[3]
The above product is pvc configurated robot in which the body of the robot is made up of pvc sheets and and the components used are dc motor, servo in order to run the robot. [11]
 [4]
[4]
A Spherical Robot or Spherical Rolling Robot, otherwise called a spherical mobile robot, is a ball-shaped robot that is mobile with a spherical exterior shape. A spherical robot includes a spherical-shaped shell that serves as the robot’s body and an internal driving unit generally known as Robot’s IDU that allows it to drive. Rolling over surfaces is how most spherical mobile robots fly. [12]
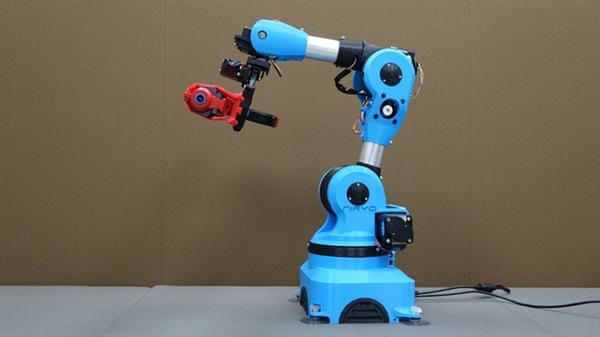
PICK AND PLACE ROBOT
 [5]
[5]
Arduino/Genuino Uno is a microcontroller board based on the ATmega328P (datasheet). It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header and a reset button. [13]
 [6]
[6]
An infrared (IR) sensor is an electronic device that measures and detects infrared radiation in its surrounding environment. Active infrared sensors both emit and detect infrared radiation. Active IR sensors have two parts: a light emitting diode (LED) and a receiver. [14]
 [7]
[7]
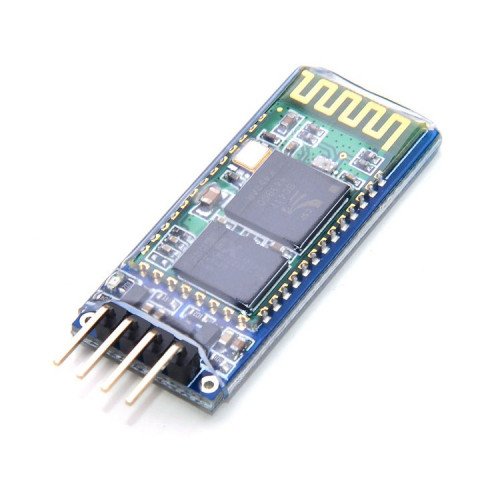
A Bluetooth module is usually a hardware component that provides. a wireless product to work with the computer; or in some cases, the. Bluetooth may be an accessory or peripheral, or a wireless headphone. or other product (such as cellphones can use.) [15]
 [8]
[8]
A DC motor is an electromechanical actuator used for producing continuous movement with controllable speed of rotation. DC motors are ideal for use in applications where speed control and servo type control or positioning is required. [16]
 [9]
[9]
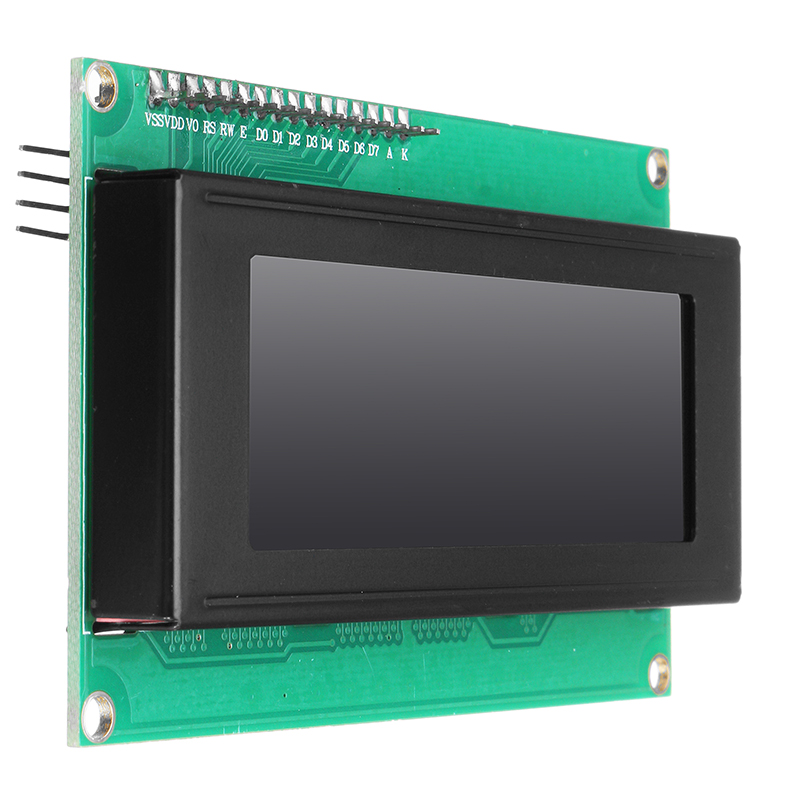
The LCD (Liquid Crystal Display) is a type of display that uses the liquid crystals for its operation. Here, we will accept the serial input from the computer and upload the sketch to the Arduino. The characters will be displayed on the LCD. A liquid-crystal display (LCD) is a flat-panel display or other electronically modulated optical device that uses the light-modulating properties of liquid crystals combined with polarizers. Liquid crystals do not emit light directly,[1] instead using a backlight or reflector to produce images in color or monochrome.[2] LCDs are available to display arbitrary images (as in a general-purpose computer display) or fixed images with low information content, which can be displayed or hidden. For instance: preset words, digits, and seven-segment displays, as in a digital clock, are all good examples of devices with these displays. [17]
| sl no. | Electronic components | Mechanical components | working principle | links |
|---|---|---|---|---|
| 1 | 4.5V Battery | Spur gear (5 in no),Shaft (2 in no),10rpm high torque dc motor (3 in no),Bearing (3 in no) along with this cutter, grippers, pvc sheets | 1)A battery is a device that stores chemical energy and converts it to electrical energy. The chemical reactions in a battery involve the flow of electrons from one material (electrode) to another, through an external circuit. The flow of electrons provides an electric current that can be used to do work. 2) Spur gears are used to transfer motion from one shaft to a parallel shaft. The teeth are cut straight up and down, parallel to the axis of rotation. When two adjacent spur gears mesh, they spin in opposite directions.3) A shaft is a rotating machine element, usually circular in cross section, which is used to transmit power from one part to another, or from a machine which produces power to a machine which absorbs power. 4)The DC motor is the motor which converts the direct current into the mechanical work. It works on the principle of Lorentz Law, which states that “the current carrying conductor placed in a magnetic and electric field experience a force”. And that force is the Lorentz force. 5)The purpose of a ball bearing is to reduce rotational friction and support radial and axial loads. It achieves this by using at least two races to contain the balls and transmit the loads through the balls. | https://youtu.be/5DF0G3qc4DY |
| 2 | Arduino,Potentiometer,PCB board ,Connector,Soldering | Foam sheet,Jumper wire,servo motor | 1)The Arduino Mega 2560 is a microcontroller board based on the ATmega2560. It has 54 digital input/output pins (of which 15 can be used as PWM outputs), 16 analog inputs, 4 UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button.2) Servos are controlled by sending an electrical pulse of variable width, or pulse width modulation (PWM), through the control wire. There is a minimum pulse, a maximum pulse, and a repetition rate. A servo motor can usually only turn 90° in either direction for a total of 180° movement.3) The principle of a potentiometer is that the potential dropped across a segment of a wire of uniform cross-section carrying a constant current is directly proportional to its length. The potentiometer is a simple device used to measure the electrical potentials (or compare the e.m.f of a cell).4) PCB is an acronym for printed circuit board. It is a board that has lines and pads that connect various points together. A PCB allows signals and power to be routed between physical devices. Solder is the metal that makes the electrical connections between the surface of the PCB and the electronic components. | https://youtu.be/5JPRepx56zc |
| 3 | Arduino UNO board,2 bread board DC motors,IR sensors,DC motor driver LD293D,Sv o/p charger | Wheels,Gripper,Jumper wires | 1)Active infrared sensors both emit and detect infrared radiation. Active IR sensors have two parts: a light emitting diode (LED) and a receiver. When an object comes close to the sensor, the infrared light from the LED reflects off of the object and is detected by the receiver.2) L293D IC is a typical Motor Driver IC which allows the DC motor to drive on any direction. ... This L293D IC works on the basic principle of H-bridge, this motor control circuit allows the voltage to be flowing in any direction | https://youtu.be/ncXbRUFN5jo |
| 4 | Arduino UNO,L298 motor driver,MG995 servo motor,12v DC gear motor ,DC to DC buck converter,hc -05 Bluetooth module,Battery 7.4v to 12v,Power on /off switch | Robotic gripper | 1)The L298 Driver is a high voltage, high current dual full bridge driver designed to accept standard TTL logic levels and drive inductive loads such relays, solenoids, DC and stepping motors.2) Servo motor works on the PWM (Pulse Width Modulation) principle, which means its angle of rotation is controlled by the duration of pulse applied to its control PIN.3) A Buck converter steps down a DC voltage from the input to the output. The circuit operation depends on the conduction state of the MOSFET: On-state: The current through the inductor increases and the diode blocks. Energy is transferred from the inductor to the capacitor resulting in a decreasing inductor current.4) HC-05 Bluetooth Module is an easy-to-use Bluetooth SPP (Serial Port Protocol) module, designed for transparent wireless serial connection setup. Its communication is via serial communication which makes an easy way to interface with controller or PC. | https://youtu.be/NXQUA3JxMzI |
Citations:-
[4]http://www.tthk.ee/inlearcs/wp-content/uploads/2020/09/Picture-23.png
[5]https://www.distrelec.biz/Web/WebShopImages/landscape_large/9-/01/arduino-a000066.jpg
[7]https://www.robomart.com/image/cache/catalog/RM0848/rm0848-500x500.jpg
[8]https://www.alliedmotion.com/wp-content/uploads/products/commercial-industrial-dc-motors.jpg
[10]https://yorkpmh.com/resources/hydraulic-vs-pneumatic-vs-electric-actuators/
[11]https://www.motoman.com/en-us/about/company/robotics-glossary
[15]https://electronics.howstuffworks.com/bluetooth.htm