Content mirrored for search engine indexing from:
https://github.com/HondaLab/Robot-Intelligence/wiki/ssr106
Why does this service exist?
ssr106 - HondaLab/Robot-Intelligence GitHub Wiki
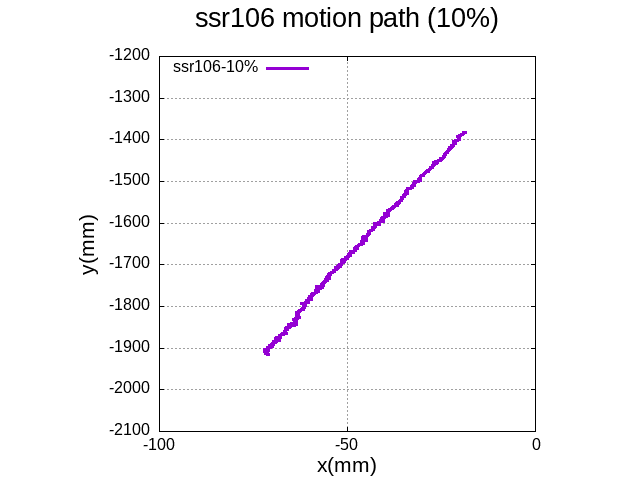
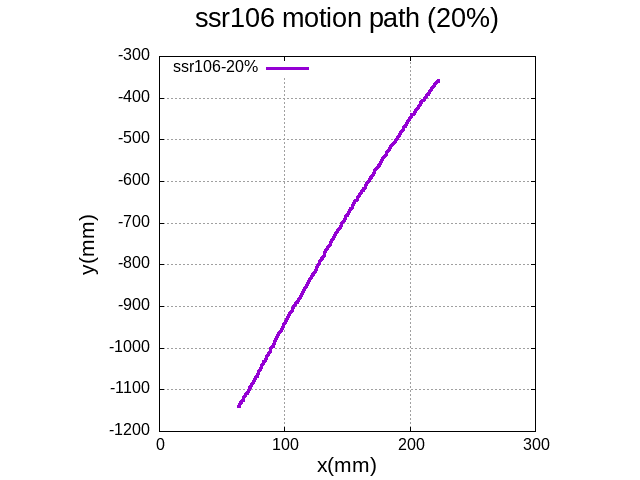
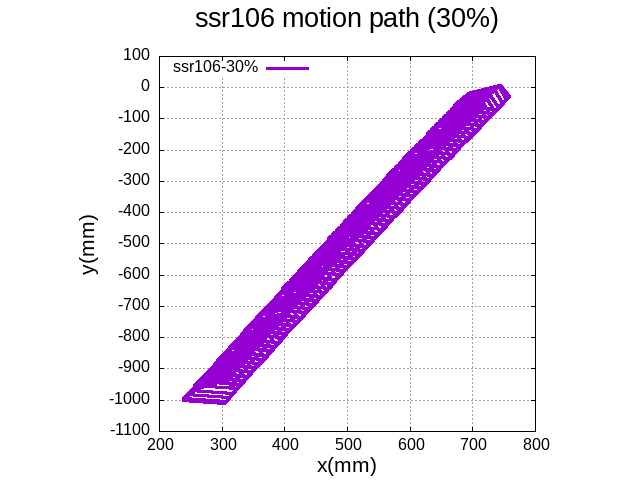
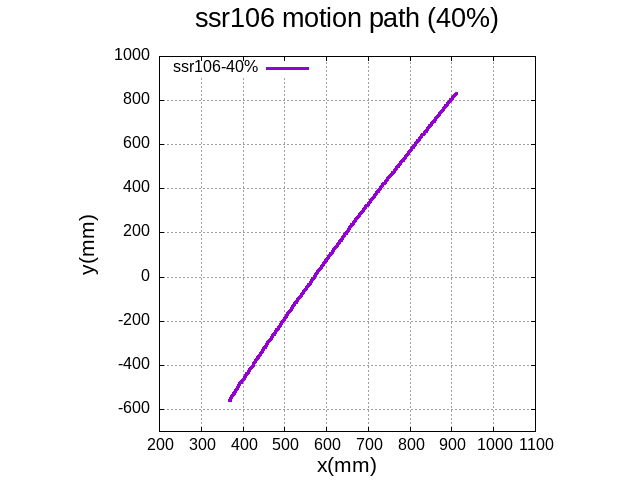
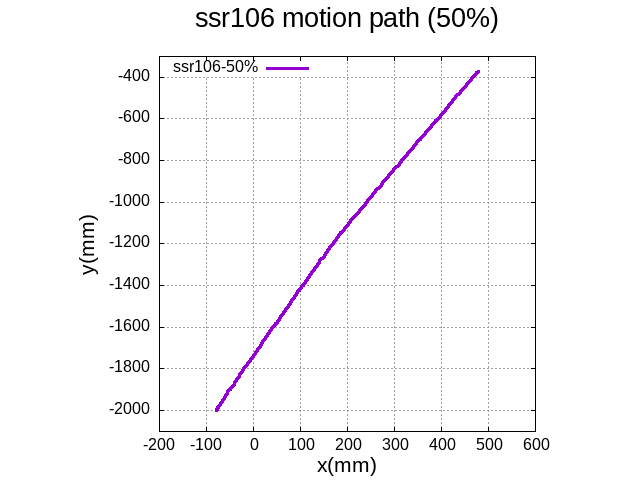
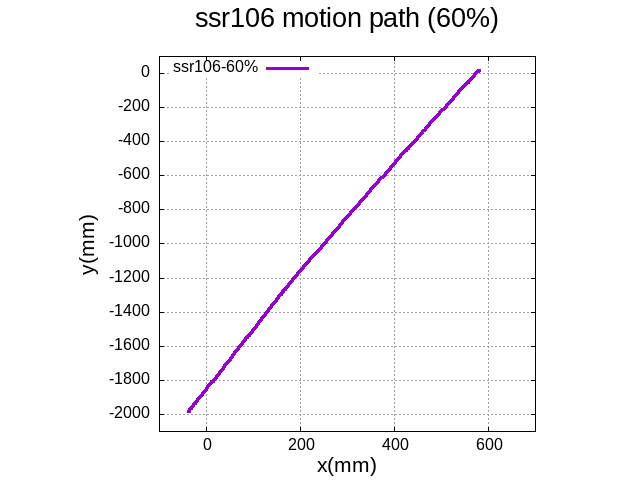
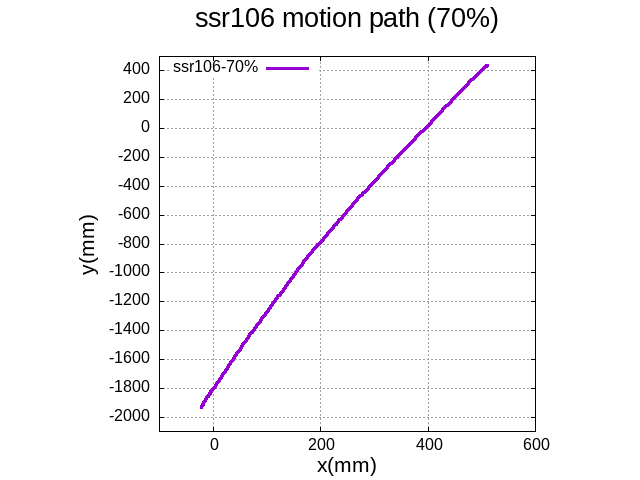
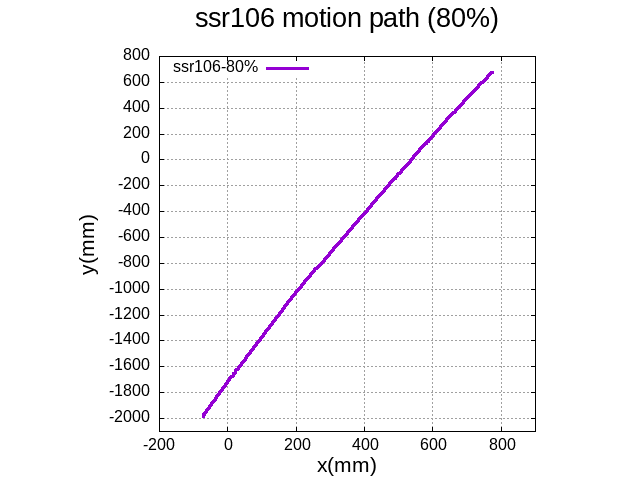
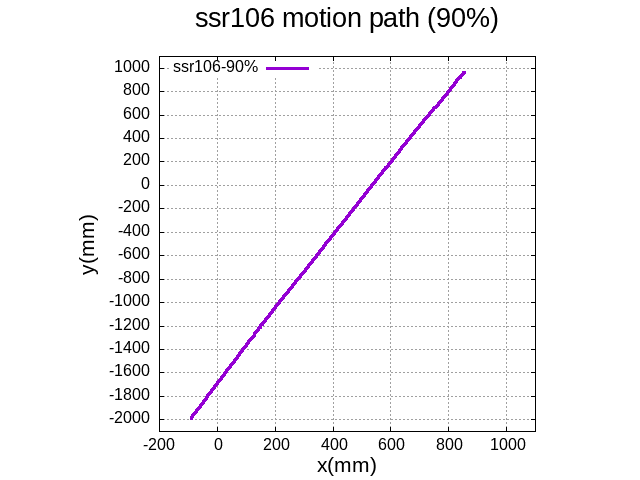
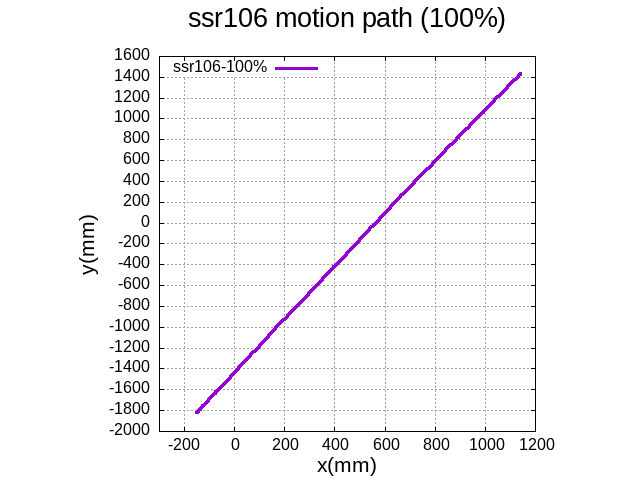
trajectory
🗂️ Page Index for this GitHub Wiki