GATHERING PERTINENT INFORMATION - H-Division-2020-2021-Even/Repo-05 GitHub Wiki
BIO MIMIC BOT
Bio mimic robot designs attempt to translate biological principles into engineered systems, replacing more classical engineering solutions in order to achieve a function observed in the natural system. This chapter will focus on mechanism design for bio-inspired robots that replicate key principles from nature with novel engineering solutions. The challenges of biomimetic design include developing a deep understanding of the relevant natural system and translating this understanding into engineering design rules. This often entails the development of novel fabrication and actuation to realize the biomimic design
Fig 1
Fig 2

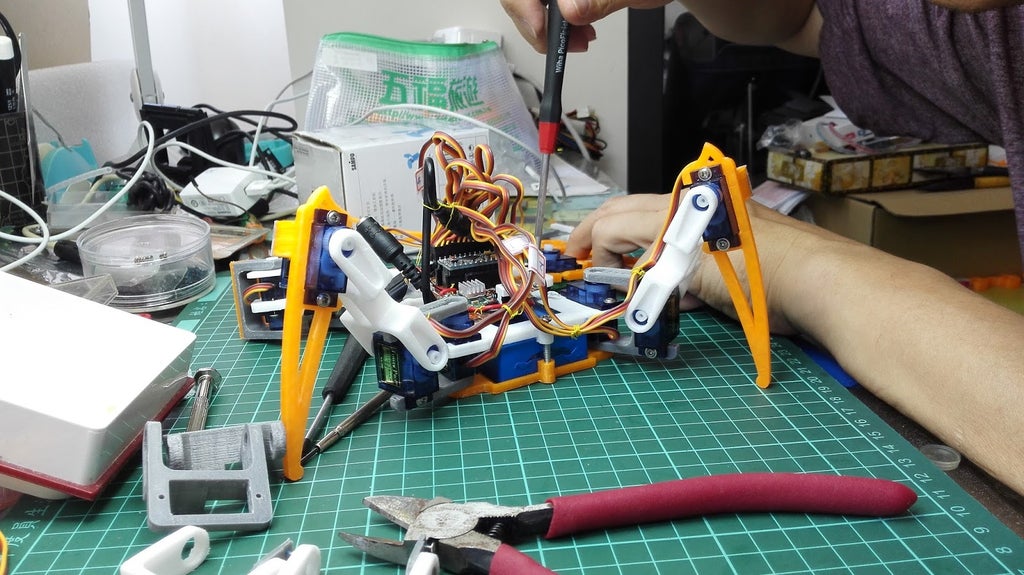
SPIDER BOT
A quadruped robot is a robot with four legs. There are any number of ways a four-legged robot can be designed. The robot we will be building in this has four legs arranged symmetrically around the body. Each leg is actuated by three servos: one for forward/backward movement, one for up/down movement, and one to bend the leg in the middle. This gives the robot three degrees of freedom, allowing it to move in any direction.
Fig 3

Fig 4
 The parts of the bot will be 3d printed.
The parts of the bot will be 3d printed.

| Components required | Use | cost |
|---|---|---|
| Arduino uno | Works as controlling center for bot | 800 |
| Servo motors | For leg mechanism | 2580 |
| Ultrasonic sensor | To sense the free space | 150 |
| Breadboard | To fix the components | 150 |
| Jumper Wires | For connection | 200 |
| Bluetooth module | To control the bot wirelessly | 500 |
You will find quadrupeds abundant in nature, because four legs allow for passive stability, or the ability to stay standing without actively adjusting position. The same is true of robots. A four-legged robot is cheaper and simpler than a robot with more legs, yet it can still achieve stability.
Fig 5
{kind=link}
https://www.droneaddicts.net/wp-content/uploads/2019/04/Purdue-Insect-Drone.jpg https://i.ytimg.com/vi/soBSp08dsRw/maxresdefault.jpg https://content.instructables.com/ORIG/F70/5FJV/IEEOJOW6/F705FJVIEEOJOW6.jpg?auto=webp&frame=1&fit=bounds&md=8e15fc5b3685364e0936ac9ad1b10ce9 https://content.instructables.com/ORIG/FMC/CV5P/IEB87QH7/FMCCV5PIEB87QH7.jpg?auto=webp&frame=1&width=1024&fit=bounds&md=a43691c0b426b5d5e2289a929680b035