2. CONCEPT GENERATION AND PRODUCT ARCHITECTURE - H-Division-2020-2021-Even/Repo-05 GitHub Wiki
5.1 LIST OF ALL IDENTIFIED FUNCTIONS :
| SL.NO | FUNCTION |
|---|---|
| 1 | Detect obstacles |
| 2 | proper allignment of legs of the bot |
| 3 | Movement of bot |
| 4 | Alerts when obstacle detected |
| 5 | Bot should vary its speed accordingly |
| 6 | sense the vacant space for movement |
FUNCTION TREE
.png)
2.4 Establishing means- Morphological Chart
| Sl.no. | Functions | Mean 1 | Mean 2 | Mean 3 | Mean 4 |
|---|---|---|---|---|---|
| 1 | Movement of legs | Servo motor |
DC MOTOR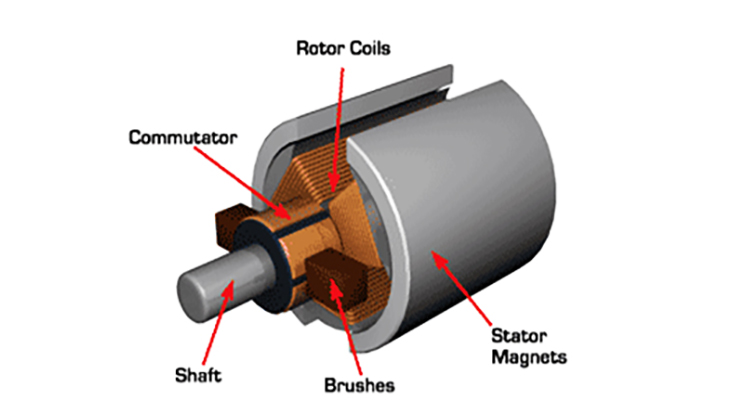 |
SERVO |
TOY SERVO |
| 2 | Controlling bot | REMOTE |
Mobile app |
JOYSTICK |
VOICE CONTROL |
| 3 | Object Detection | Ultra sonic sensor |
IR sensor |
LDR sensor |
PROXIMITY SENSOR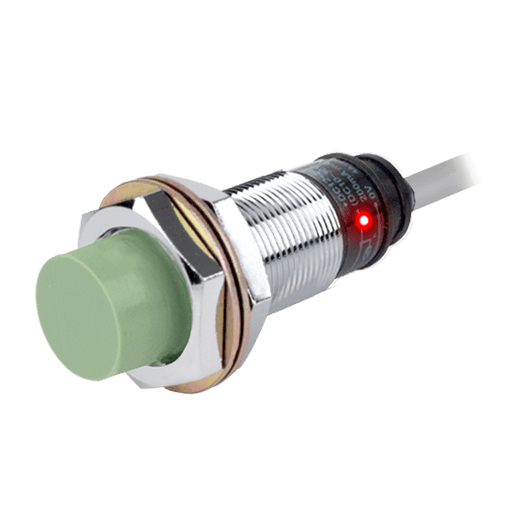 |
| 4 | Display alert message | LCD |
OLED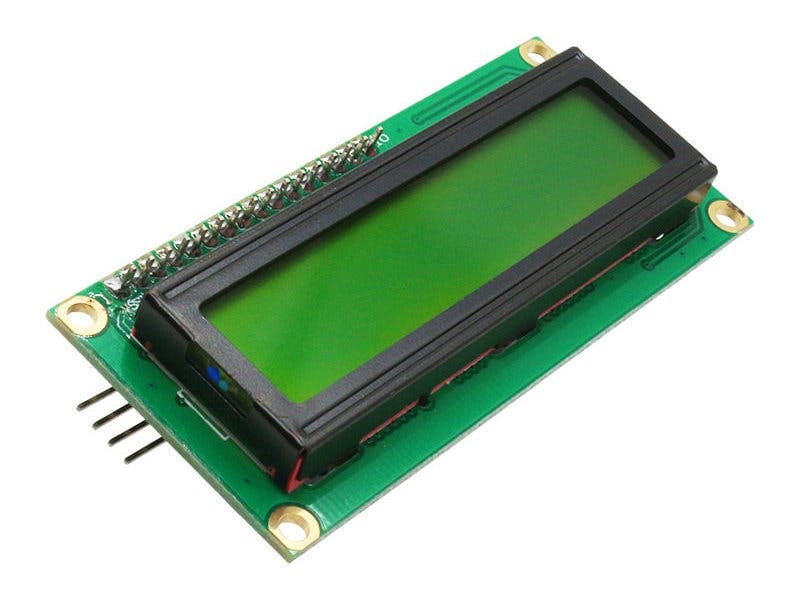 |
LED bulbs |
MOBILE APP |
| 5 | Casing | Metallic |
Plastic |
Fibre |
Wooden |
Blue prints of bot
{kind=link}
{kind=link}
Working of the designed bio mimic bots
| Design Sl .no | Designed by | Working |
|---|---|---|
| 1 | Smitha k v | The obstacles are detected through the help of sensors which are fixed in the control section. After the detection of vacant spaces or area the bot will allowed to move by aligning its legs in a certain way. Here, for movement propose bot is aided with servo motors and metallic legs for sturdy movements even in rough paches of land or platform. |
| 2. | Sneha B Patil | Each leg of bot is controlled by three servo motors. Each servo motor allows movement in one direction therefore the legs of the bot can be moved in all three directions |
| 3. | Vinay Hegde | Exactly 6 legs controlled by 12 servo motors (2 for each) to ensure the smooth and stable movement of the bot |
| 4. | Abhishek M B | This robot is controlled by the remote control. One thing is there which makes our robot quite unique is that, it can rotate 360 degree at its own place.Exploring dangerous and / or rough areas for humans. ... |
PRODUCT ARCHITECTURE
Function tree
SUB SYSTEMS
- casing
- movement of the bot
- detecting the obstacles
INTERACTION BETWEEN THE SUB SYSTEMS
WITH MOVEMENT UNIT
Table 7.1
| INTERACTIONS | OBSTACLE DETECTION UNIT | CASING UNIT | JUSTIFICATION |
|---|---|---|---|
| MATERIAL | NO | NO | There is no kind of material interaction in both obstacle detection and unit . |
| ENERGY | NO | NO | There is no energy transfer among each other units of the bot.Hence interaction of energy in sub system units is null. |
| DATA | yes | YES | YES, certainly the data tranfer will happen in all the units of bot .Data transfer mainly happens when the control unit of the bot senses any obstacle and hence the data is tranfered to both the casing and movement unit to act accordingly |
| SPATIAL | YES | NO | Surely,there is spatial interaction in the movement unit .due to this spatial interaction , the bot helps itself to align in a proper way |
WITH CASING UNIT
Table 7.2
| INTERACTIONS | OBSTACLE DETECTION UNIT | MOVEMENT UNIT | JUSTIFICATION |
|---|---|---|---|
| MATERIAL | NO | NO | There is no kind of material interaction in both obstacle detection and movement unit . |
| ENERGY | NO | NO | There is no energy transfer among each other units of the bot. Hence interaction of energy in sub system units is null. |
| DATA | YES | YES | YES, certainly the data trasnfer will happen in all the units of bot.Data transfer mainly happens when the control unit of the bot senses any obstacle and hence the data is transfered to both the casing and movement unit to act accordingly |
| SPATIAL | YES | YES | Surely,there is spatial interaction in the movement unit .due to this spatial interaction , the bot helps itself to align in a proper way |
WITH OBSTACLE DETECTION UNIT
Table 7.3
| INTERACTIONS | MOVEMENT UNIT | CASING UNIT | JUSTIFICATION |
|---|---|---|---|
| MATERIAL | NO | NO | There is no kind of material interaction in both casing and movement unit . |
| ENERGY | NO | NO | There is no energy transfer among each other units of the bot. Hence interaction of energy in sub system units is null. |
| DATA | YES | NO | YES, certainly the data transfer will happen in all the units of bot.Data transfer mainly happens when the control unit of the bot senses any obstacle and hence the data is transfered to both the casing and movement unit to act accordingly |
| SPATIAL | NO | YES | Surely,there is spatial interaction in the movement unit .due to this spatial interaction , the bot helps itself to align in a proper way |