2. Gathering Pertinent Information - G-Division-2021-22-EVEN/Repo-06 GitHub Wiki
PERTINENT INFORMATION GATHERING
1. REFERENCE LINKS
We explore the design and production of some amazing animatronic flowers. I designed the mechanics and turned the skeletons over to a team of experts in the business of making high-end artificial flowers, the results are pretty spectacular - https://www.youtube.com/watch?v=A3wpNoZmb7Y
This flower was designed for a bachelor thesis at the University of Twente - https://www.youtube.com/watch?v=nofViHo8yrw
Everlasting flower for your everlasting love. A perfect not-only Valentine's day gift to your loved one. This mechanical tulip will bloom into any color possible with just gentle touch of your hand. Its six petals will slowly open and light up. When petals are closed they create incredible ambient light with leaf patterns - https://create.arduino.cc/projecthub/jiripraus/ever-blooming-mechanical-tulip-1b0323
2. SCHEMATIC


3. SOURCES
FLOWER

Similar to a flower, the robotic flower contains components such stems and leaves, with small sensors and effectors embedded in the structure. The flower robot developed at Carnegie Mellon University utilized a seven degree of freedom structure, with one used to move the stem towards the left and right, and six other for moving the leaves. The base structure of the robot actuates the leaves, and uses the IR sensors built in on three of its petals to track objects.
As a smart home service robot, the flower robot has various intelligent functions, such as moving mechanism, sensing ability, and home appliance functions. Especially, the moving function is very important function among the various function. The moving function of flower robot consists of the blooming of flower, the swaying of the stem and the stirring of the leaves in the wind. Using SMA actuator, we can design and fabricate the stem structure with 8 mm of diameter and 6-8 inches of length.
ULTRASONIC SENSOR

An ultrasonic sensor is an electronic device that measures the distance of a target object by emitting ultrasonic sound waves, and converts the reflected sound into an electrical signal. Ultrasonic waves travel faster than the speed of audible sound (i.e. the sound that humans can hear). Ultrasonic sensors have two main components: the transmitter (which emits the sound using piezoelectric crystals) and the receiver (which encounters the sound after it has travelled to and from the target).
SERVO MOTOR

In robotics, we use servo motors to actuate movements. They are used in conveyor belts and robotic arms for various applications like packaging etc.It is used to control the angular and linear speed and position. The Pulse Width Modulation (PWM) signal controls the position of the servo motor. The servo motor receives the PWM signal from a microcontroller like the one present in the Arduino board. Servo motors are high-speed motors however they have the drawback of having the high cost and not precisely control the rotation.
CAPACITOR

Capacitor is an electronic component that stores electric charge. The capacitor is made of 2 close conductors (usually plates) that are separated by a dielectric material. The plates accumulate electric charge when connected to power source. One plate accumulates positive charge and the other plate accumulates negative charge.
The capacitance is the amount of electric charge that is stored in the capacitor at voltage of 1 Volt.The capacitance is measured in units of Farad(F).The capacitor disconnects current in direct current (DC) circuits and short circuit in alternating current (AC) circuits.
IR SENSOR
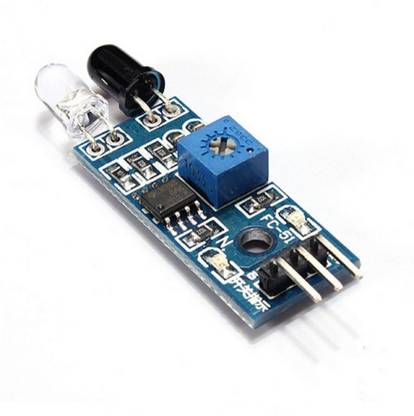
LDR's(Light dependent resistor) or photoresistors- These are used to sense the ambient light in the room. LDR's are common, easy to acquire components. Their effectiveness is dependent on the amount of lighting in a room. So for this project we will make use of a potentiometer and a Wheatstone bridge to ensure that we get the right sensitivity and stability in the sensor.
Sensor boards- It is made up with separate circuit board for the amplifier circuits which are used to condition signals from the the LDR sensors, the Microphone and the output to the buzzer.
Buzzer A simple buzzer circuit will be connected so that our bot will also be able to make sounds. Microphone An electret microphone will be used to sense sound. For the microphone to work we will need to make use of an amplifier to generate a signal large enough to be recognized by the arduino. IR receiver The IR transmitting remote is used to transmit data to the receiver and works the same as the remotes for the aforementioned devices. It allows the rover to be controlled with an IR remote. The IR receiver used is a TSOP382 which is found in many common appliances/devices such as TV's, DVD players, sound systems, air conditioners etc.
LED LIGHTS

Robotic flower with led
LED stands for light emitting diode. LED lighting products produce light up to 90% more efficiently than incandescent light bulbs. How do they work? An electrical current passes through a microchip, which illuminates the tiny light sources we call LEDs and the result is visible light. To prevent performance issues, the heat LEDs produce is absorbed into a heat sink.
The useful life of LED lighting products is defined differently than that of other light sources, such as incandescent or compact fluorescent lighting (CFL). LEDs typically do not “burn out” or fail. Instead, they experience ‘lumen depreciation’, wherein the brightness of the LED dims slowly over time. Unlike incandescent bulbs, LED “lifetime” is established on a prediction of when the light output decreases by 30 percent.
LEDs are incorporated into bulbs and fixtures for general lighting applications. Small in size, LEDs provide unique design opportunities. Some LED light fixtures may have LEDs built in as a permanent light source. There are also hybrid approaches where a non-traditional “bulb” or replaceable light source format is used and specially designed for a unique fixture. LEDs offer a tremendous opportunity for innovation in lighting form factors and fit a wider breadth of applications than traditional lighting technologies.
STEPPER MOTOR

The stepper motor rotor is a permanent magnet, when the current flows through the stator winding, the stator winding to produce a vector magnetic field. The magnetic field drives the rotor to rotate by an angle so that the pair of magnetic fields of the rotor and the magnetic field direction of the stator are consistent. When the stator's vector magnetic field is rotated by an angle, the rotor also rotates with the magnetic field at an angle. Each time an electrical pulse is input, the motor rotates one degree further. The angular displacement it outputs is proportional to the number of pulses input and the speed is proportional to the pulse frequency. Change the order of winding power, the motor will reverse. Therefore, it can control the rotation of the stepping motor by controlling the number of pulses, the frequency and the electrical sequence of each phase winding of the motor.
BRUSHED DC MOTOR
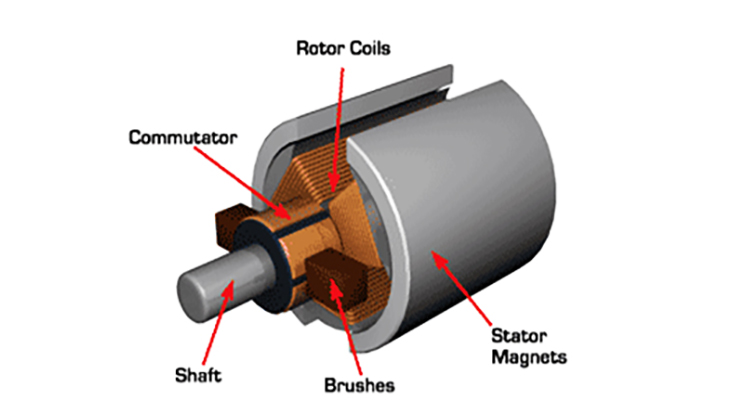
The Brushed DC motors use DC power to adjust the voltage and current level to move. A coil generates a magnetic field around the armature. Basically, the opposing polarity and attraction of rotor and stator cause rotation. The permanent magnet DC motors use brushes to acquire the voltage and current for the rotating armature. Actually the brush conducts the current from the source to the armature. However, they have the drawback of having low speed and poor heat dissipation.
Specifically, the mobile robots use the brushed DC motors and typically use the battery source to power the motor. Robotic cars also us the brushed DC motor in order to move the wheel.
BRUSHLESS DC MOTOR
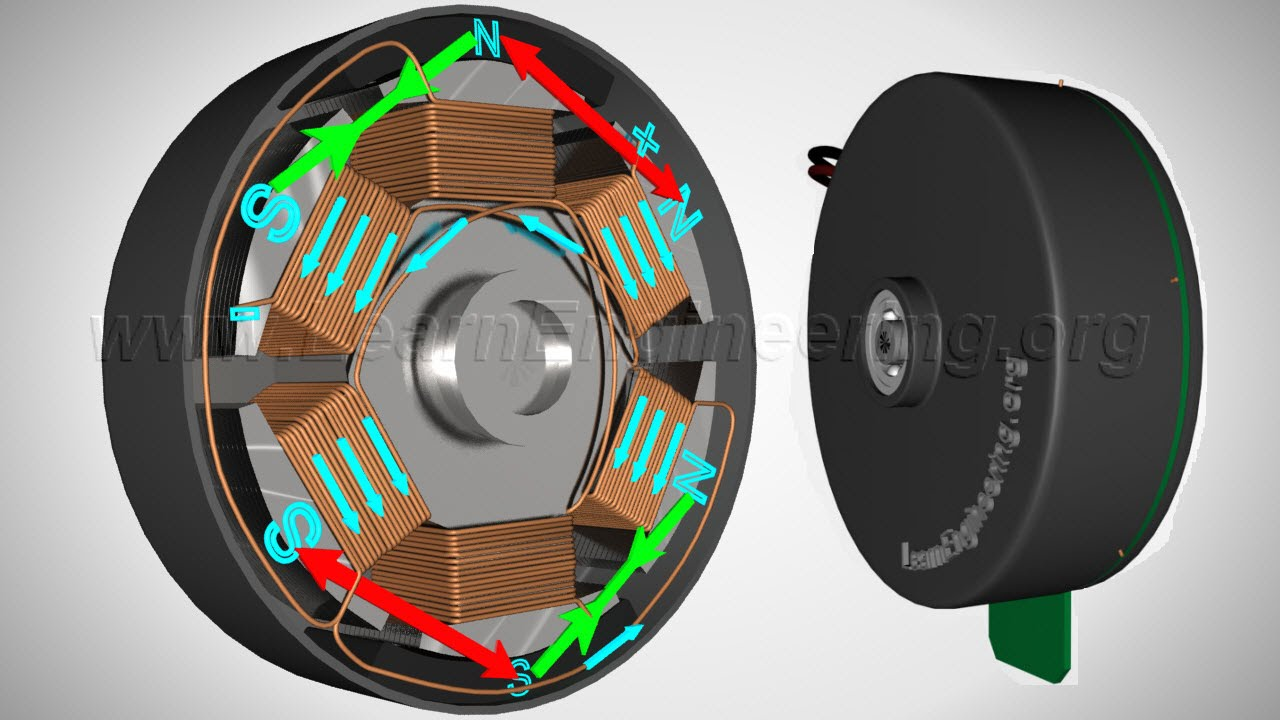
Although, the brushless DC motor also works on the same principle as the brushed DC motor. However, both have a different construction. In the case of brushless DC motors, the permanent magnets rotate around a fixed armature causing the change in polarity in the coil. As a result, the motor rotates.
Brushless DC motors don’t use carbon brushes. As a result, there is much lesser internal resistance and therefore the better heat dissipation. Moreover, the brushless DC motors require low maintenance, are less noisy, and smaller in size. However, they are more expensive than the brushed DC motors.
AS the brushless DC motors are smaller in size, they make a good choice in Drones and multicopters. Since they require low maintenance, brushless motors are also used in space robots. The other applications of brushless DC motors are the [humanoid robots].