Stm32 I2C - FabLabSeoul/WingProject GitHub Wiki
이 글은 Stm32 Value line discovery보드 전용 설명이다.
I2C 연결. ( !!잊지말자. SCL, SDA 핀에 Pull-Up 저항을 꼭 달아줘야 한다. )

I2C(inter integrated circuit)는 선 두가닥만 연결하면 정보를 주고받을 수 있는 통신 프로토콜을 말한다. 두 선을 각각 SCL(Serial CLock), SDA(Serial DAta)라고 말한다. 통신을 시작하고 끊는 Master와 정보를 주고 받을 수 있는 Slave 역할이 있다. (물론 마스터도 정보를 주고받을 수 있다.) 마스터 하나에 두 개이상의 슬래이브가 붙을 수 있기 때문에, 전자기기의 내부 장치들간의 통신에 많이 쓰인다.
하나의 마스터에 두 개이상의 슬래이브가 붙을 수 있기 때문에, 누가 정보를 받을지에 대한 정보(Address)를 송신해야 한다. 또한 통신의 신뢰성을 높이기위해 HandShake 방식의 프로토콜을 사용하고 있다. 다시말해, 정보를 송신하고 난 후, ACK이벤트를 받아야, 다음 정보를 송신할 수 있다. 접속을 시작하고, 접속을 끊는 것도 마찬가지다. (핸드세이킹 방식 때문에 코드가 복잡하다.)
글을 계속 읽어나가기 전에 먼저 다음 문서들을 읽어보자.
- stm32f103응용.pdf, i2c
- http://lemonkenya.egloos.com/3442831
앞으로 설명할 예제는 STM32\stm32vldiscovery_package\Project\Examples\I2C 폴더에 있다.
Stm32 MCU의 I2C 포트 두 개를 사용하여 서로 통신하는 예제를 보여준다. I2C1은 마스터가 되고, I2C2는 슬래이브가 된다. (I2C를 쉽게 설명하기 위한 예제이지, 같은 MCU에서 I2C 통신하는 경우는 없다.)
- PB6 : I2C1_SCL (마스터)
- PB7 : I2C1_SDA (마스터)
- PB10 : I2C2_SCL (슬래이브)
- PB11 : I2C2_SDA (슬래이브)
각 포트는 다음과 연결한다.
- PB6 - PB10
- PB7 - PB11
즉, SCL은 SCL끼리, SDA는 SDA끼리 연결한다. I2C1 에서 I2C2로 데이타를 전송해서, 올바로 전송되었는지 검사하는 예제다. 전송하는 정보는 1바이트 크기이고, {1,2,3,4} 4개의 정보를 순서대로 보낸다.
I2C도 클럭을 설정해줘야 한다. PB6,7,10,11 포트를 사용하기 때문에, GPIOB 포트 클럭도 설정한다.
void RCC_Configuration(void)
{
/* Enable peripheral clocks ------------------------------------------------*/
/* GPIOB Periph clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* I2C1 and I2C2 Periph clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1 | RCC_APB1Periph_I2C2, ENABLE);
}I2C를 사용할 포트 PB6,7,10,11 을 설정한다. I2C 포트는 정해져 있다. 테이블은 다음과 같다.
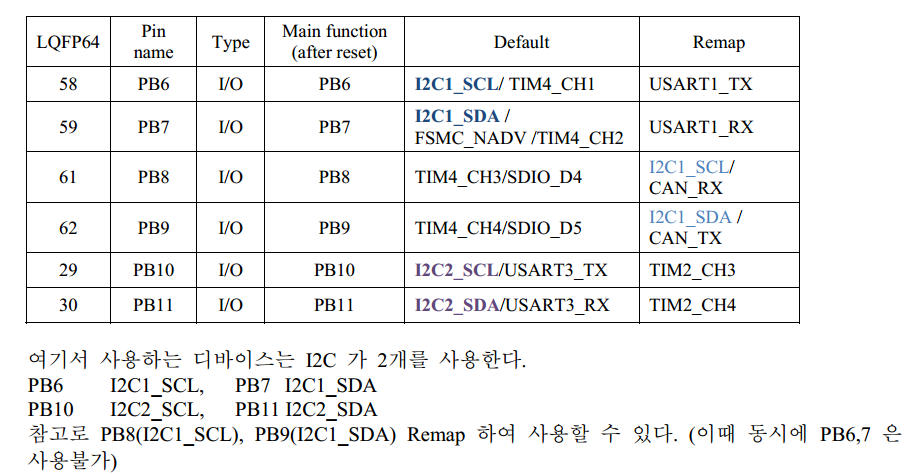
(Stm32f103응용.pdf, page 220)
PB6,7(I2C1), PB10,11(I2C2) 포트를 Alternate-Function 모드로 설정한다.
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure I2C1 pins: SCL and SDA ----------------------------------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure I2C2 pins: SCL and SDA ----------------------------------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}I2C1,2 두 개의 I2C모듈이 있다. 어떤 모듈을 사용할지 선택하고, I2C주소를 설정한다. 주소가 없으면 정보를 받을 수 없다. 7비트와 10비트 주소 타입 중 하나를 선택하자. 주소 타입에 따라 전송 프로토콜이 바뀌기 때문에 주의해야 한다.
I2C 설정에 관한 자세한 내용은 매뉴얼을 참고하자.
#define I2C1_SLAVE_ADDRESS7 0x30
#define I2C2_SLAVE1_ADDRESS7 0x30
#define ClockSpeed 200000
I2C_InitTypeDef I2C_InitStructure;
/* Enable I2C1 and I2C2 ----------------------------------------------------*/
I2C_Cmd(I2C1, ENABLE);
I2C_Cmd(I2C2, ENABLE);
/* I2C1 configuration ------------------------------------------------------*/
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = I2C1_SLAVE_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = ClockSpeed;
I2C_Init(I2C1, &I2C_InitStructure);
/* I2C2 configuration ------------------------------------------------------*/
I2C_InitStructure.I2C_OwnAddress1 = I2C2_SLAVE1_ADDRESS7;
I2C_Init(I2C2, &I2C_InitStructure);I2C는 마스터 모드일 때와 슬래이브 모드일 때에 따라 정보를 송수신하는 방식이 다르다. 이 예제에서 마스터는 송신(Transmitter)만 한다. 슬래이브는 정보를 수신(Receiver)만 한다. I2C 프로토콜은 다음의 과정을 거쳐 정보를 송수신하게 된다. 마스터, 슬래이브 모두 7bit-address 모드다. 자세한 내용은 매뉴얼을 참고하자.
I2C 프로토콜의 데이터 전송 과정은 다음과 같다.
- 마스터가 슬레이브에 전송을 시작한다는 표현 - Start
- 전송 목적지의 주소 표현 - Address
- 전송 목적 표현(읽기용인가 또는 쓰기용인가) - R/W
- 전송 데이터 표현 - Data
- 슬레이브가 정상적으로 데이터를 수신했다는 응답 표현 - Ack
- 전송 종료 표현 - Stop
![]()
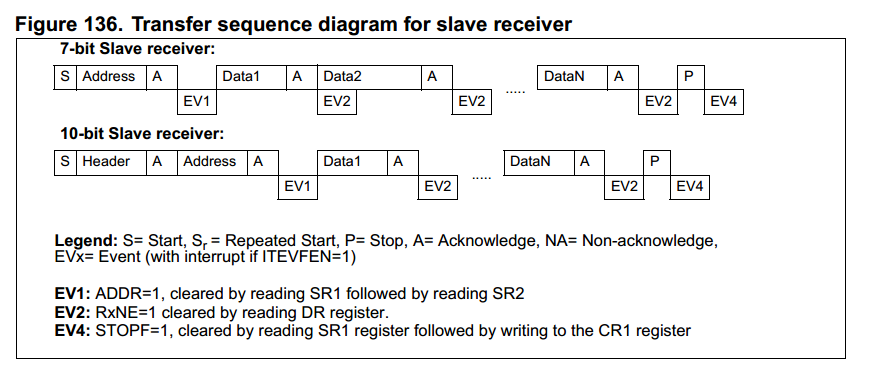
I2C1 에서 Start를 시작하고, I2C2로부터 응답이 올 때까지 대기한다. 이 과정은 위에 있는 시퀀스 다이어그램을 그대로 따른다. (소스상에 나오는 EV1은 시퀀스 다이어그램의 EV8_1 과 같다.)
/* Send I2C1 START condition */
I2C_GenerateSTART(I2C1, ENABLE);
/* Test on I2C1 EV5 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
/* Send I2C2 slave Address for write */
I2C_Send7bitAddress(I2C1, I2C2_SLAVE1_ADDRESS7, I2C_Direction_Transmitter);
/* Test on I2C2 EV1 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED));
/* Test on I2C1 EV6 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); I2C1에서 데이타를 보내고, I2C2는 데이타를 받는다. 7bit address master transmitter인 I2C1은 I2C1_Buffer1_Tx[] 배열에 저장된 정보를 하나씩 송신한다. 7bit address slave receiver인 I2C2는 마스터로부터 넘어온 정보를 하나씩 받아서 I2C2_Buffer1_Rx[] 배열에 저장한다. 이 과정은 위에 있는 시퀀스 다이어그램을 그대로 따른다.
uint8_t I2C1_Buffer1_Tx[BufferSize] = {1,2,3,4};
uint8_t I2C2_Buffer1_Rx[BufferSize];
uint8_t Tx_Idx = 0, Rx_Idx = 0;
/* Send data */
while (Rx_Idx < BufferSize)
{
/* Send I2C1 data */
I2C_SendData(I2C1, I2C1_Buffer1_Tx[Tx_Idx++]);
/* Test on I2C2 EV2 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_BYTE_RECEIVED));
/* Store received data on I2C2 */
I2C2_Buffer1_Rx[Rx_Idx++] = I2C_ReceiveData(I2C2);
/* Test on I2C1 EV8 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
}마스터인 I2C1에서 Stop 메세지를 보내고 접속을 끊는다. 슬래이브도 접속이 끊겼는지 확인하고 통신을 종료한다.
/* Send I2C1 STOP Condition */
I2C_GenerateSTOP(I2C1, ENABLE);
/* Test on I2C2 EV4 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_STOP_DETECTED));
/* Clear I2C2 STOPF flag: read operation to I2C_SR1 followed by a
write operation to I2C_CR1 */
(void)(I2C_GetFlagStatus(I2C2, I2C_FLAG_STOPF));
I2C_Cmd(I2C2, ENABLE); 이 예제는 STM32\stm32vldiscovery_package\Project\Examples\I2C 폴더에 있다.
I2C 포트 두 개를 사용하여 서로 통신하는 예제를 보여준다. 포트 PB6,7(I2C1)은 마스터가 되고, 포트 PB10,11(I2C2)은 슬래이브가 된다. 각각의 SCL, SDA포트를 연결해서 테스트 해보자. 그리고 SCL, SDA 포트에 풀업 저항을 달아야 제대로 동작한다.
회로구성은 https://harinadha.wordpress.com/2012/07/24/i2c_problem-mpu6050/ 를 참조하자.
(I2C를 쉽게 설명하기 위한 예제이지, 같은 MCU에서 I2C 통신하는 경우는 없다.)
(while문으로 ACK를 기다리기 때문에 만약 I2C선이 끊긴다면, 영원히 대기할 가능성이 높다. 실전에서는 이런 코드를 쓰면안된다.)
//
// I2C Test
//
#include "stm32f10x.h"
#include "stm32f10x_i2c.h"
/* Private typedef -----------------------------------------------------------*/
typedef enum { FAILED = 0, PASSED = !FAILED} TestStatus;
/* Private define ------------------------------------------------------------*/
#define I2C1_SLAVE_ADDRESS7 0x30
#define I2C2_SLAVE1_ADDRESS7 0x30
#define BufferSize 4
#define ClockSpeed 200000
I2C_InitTypeDef I2C_InitStructure;
uint8_t I2C1_Buffer1_Tx[BufferSize] = {1,2,3,4};//, I2C1_Buffer2_Tx[BufferSize] = {5,6,7,8};
uint8_t I2C2_Buffer1_Rx[BufferSize];//, I2C2_Buffer2_Rx[BufferSize];
uint8_t Tx_Idx = 0, Rx_Idx = 0;
volatile TestStatus TransferStatus1 = FAILED;//, TransferStatus2 = FAILED;
/* Private functions ---------------------------------------------------------*/
void RCC_Configuration(void);
void GPIO_Configuration(void);
TestStatus Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength);
/**
* @brief Main program
* @param None
* @retval None
*/
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
/* Enable I2C1 and I2C2 ----------------------------------------------------*/
I2C_Cmd(I2C1, ENABLE);
I2C_Cmd(I2C2, ENABLE);
/* I2C1 configuration ------------------------------------------------------*/
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = I2C1_SLAVE_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = ClockSpeed;
I2C_Init(I2C1, &I2C_InitStructure);
/* I2C2 configuration ------------------------------------------------------*/
I2C_InitStructure.I2C_OwnAddress1 = I2C2_SLAVE1_ADDRESS7;
I2C_Init(I2C2, &I2C_InitStructure);
/*----- First transmission Phase -----*/
/* Send I2C1 START condition */
I2C_GenerateSTART(I2C1, ENABLE);
/* Test on I2C1 EV5 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
/* Send I2C2 slave Address for write */
I2C_Send7bitAddress(I2C1, I2C2_SLAVE1_ADDRESS7, I2C_Direction_Transmitter);
/* Test on I2C2 EV1 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED));
/* Test on I2C1 EV6 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* Send data */
while (Rx_Idx < BufferSize)
{
/* Send I2C1 data */
I2C_SendData(I2C1, I2C1_Buffer1_Tx[Tx_Idx++]);
/* Test on I2C2 EV2 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_BYTE_RECEIVED));
/* Store received data on I2C2 */
I2C2_Buffer1_Rx[Rx_Idx++] = I2C_ReceiveData(I2C2);
/* Test on I2C1 EV8 and clear it */
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
}
/* Send I2C1 STOP Condition */
I2C_GenerateSTOP(I2C1, ENABLE);
/* Test on I2C2 EV4 and clear it */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_SLAVE_STOP_DETECTED));
/* Clear I2C2 STOPF flag: read operation to I2C_SR1 followed by a
write operation to I2C_CR1 */
(void)(I2C_GetFlagStatus(I2C2, I2C_FLAG_STOPF));
I2C_Cmd(I2C2, ENABLE);
/* Check the corectness of written data */
TransferStatus1 = Buffercmp(I2C1_Buffer1_Tx, I2C2_Buffer1_Rx, BufferSize);
/* TransferStatus1 = PASSED, if the transmitted and received data
are equal */
/* TransferStatus1 = FAILED, if the transmitted and received data
are different */
while (1)
{
}
}
/**
* @brief Configures the different system clocks.
* @param None
* @retval None
*/
void RCC_Configuration(void)
{
/* Enable peripheral clocks ------------------------------------------------*/
/* GPIOB Periph clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* I2C1 and I2C2 Periph clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1 | RCC_APB1Periph_I2C2, ENABLE);
}
/**
* @brief Configures the different GPIO ports.
* @param None
* @retval None
*/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure I2C1 pins: SCL and SDA ----------------------------------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure I2C2 pins: SCL and SDA ----------------------------------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/**
* @brief Compares two buffers.
* @param pBuffer1, pBuffer2: buffers to be compared.
* @param BufferLength: buffer's length
* @retval PASSED: pBuffer1 identical to pBuffer2
* FAILED: pBuffer1 differs from pBuffer2
*/
TestStatus Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength)
{
while(BufferLength--)
{
if(*pBuffer1 != *pBuffer2)
{
return FAILED;
}
pBuffer1++;
pBuffer2++;
}
return PASSED;
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif- http://cafe.daum.net/_c21_/bbs_search_read?grpid=1CJLD&fldid=NRrD&datanum=1
- http://nexp.tistory.com/866
- https://harinadha.wordpress.com/2012/07/24/i2c_problem-mpu6050/
- 예제 STM32\STM32F10x_StdPeriph_Lib_V3.3.0\Project\STM32F10x_StdPeriph_Examples\I2C\DualAddress
- 예제 STM32\STM32F10x_StdPeriph_Lib_V3.3.0\Project\STM32F10x_StdPeriph_Examples\I2C\10bitAddress
- stm32f103응용.pdf, i2c
- http://lemonkenya.egloos.com/3442831
- stm32_i2c.pdf