HMC5883L - FabLabSeoul/WingProject GitHub Wiki

HMC5883L은 HoneyWell 사가 만든 3축 지자기 센서다.
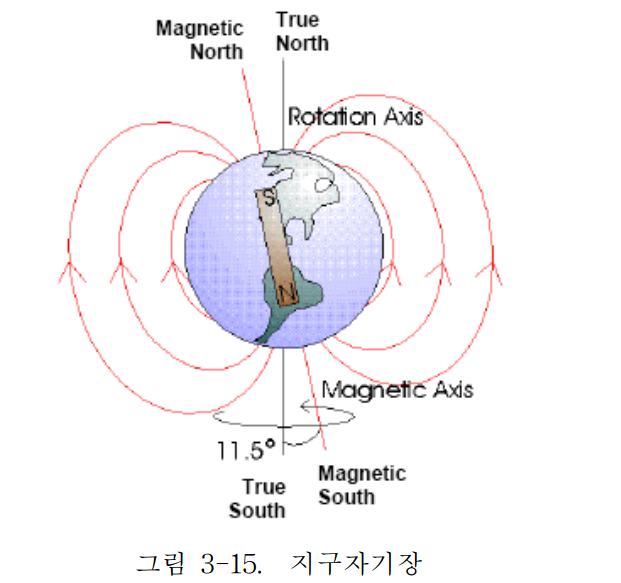
지자기 센서는 지구의 자기장을 이용해 방향을 측정한다. 때문에 주위에 전자기기가 있거나, 자기력을 일으키는 물건이 있다면 제대로 동작하지 않는다. 3축 지자기 센서는 x,y,z축의 자기장의 크기(guass)를 측정한다.
HMC5883L은 MPU-6050에서 계산하기 힘든 Yaw각을 알아오는 용도로 쓰인다. 그러나 MPU-6050 센서의 온도특성에 따른 드리프트 특성을 감안한 알고리즘을 사용한다면 MPU-6050으로도 Yaw각을 구할 수 있다.
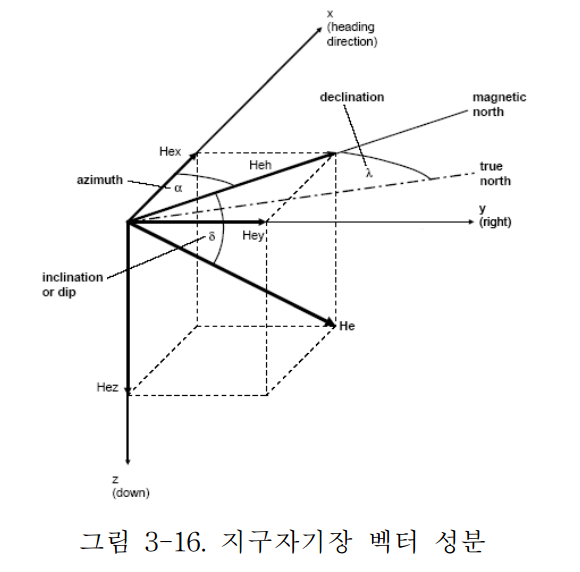
HMC5883L도 MPU-6050과 마찬가지로 I2C통신으로 정보를 얻거나 쓰고, 레지스터 주소로 원하는 정보에 접근한다. 지자기 센서의 x,y,z축의 단위는 gauss를 사용하나, 센서가 가르키는 방향을 알기위해서는 단위를 신경쓰지 않고, atan2(my, mx) 공식을 이용해 바로 구할 수 있다.
이 글은 Stm32 Value line discovery보드 개발을 위한 글이다.
Stm32 Value line discovery 보드로 지자기 센서를 테스트하는 코드는 STM32\stm32vldiscovery_package\Project\Examples\HMC5883L 경로에 있다.
Arduino로 지자기 센서를 테스트하는 코드는 Arduino\Adafruit_HMC5883_Unified-master\examples\magsensor 경로에 있다.
HMC5883L 센서가 올바로 작동하는지 시험해보기 위해서는 Stm32로 할 경우, HMC5883L 프로젝트로 Stm32를 실행하고, PB11-SCL, PB10-SDA 핀을 HMC5883L센서와 연결한다. 시리얼통신으로 센서 값을 보내기 때문에, Processing 프로젝트 HMC5883L_test_stm32를 실행하면 HMC5883L 의 지자기센서 x,y,z를 읽어들여 3D로 나침반을 출력한다.
Stm32 Serial Debugging문서를 참고하면 Stm32로 바로 시리얼 통신하는 방법을 알 수있다.
아두이노로 HMC5883L 센서를 시험할 경우, 아두이노 프로젝트 magsensor를 실행한다. 이 때 HMC5883L과 I2C통신할 포트 A4-SDA, A5-SCL을 연결한다. 정상적으로 실행되었다면, 지자기 센서정보가 시리얼을 통해 PC로 전달되게 된다. 그 후 Processing 프로젝트 HMC5883L_test_arduino를 열어 실행하면 3D 나침반이 출력된다.
GY-271 보드는 SCL, SDA 포트에 풀업저항이 붙어있기 때문에, 따로 달아줄 필요 없다. 나머지 보드들은 회로도를 확인하고 풀업저항을 달자.
Stm32 소스는 https://harinadha.wordpress.com/2012/05/24/hmc5883llib/ 를 이용했다. MPU-6050 라이브러리를 작성한 사람과 동일하다. 이 코드의 심각한 문제는 while()문으로 ACK가 올 때까지 대기하는 부분이다. 만약 센서의 I2C라인이 물리적으로 끊어질 경우, 매인 프로그램은 멈춰버리게 된다. 그래서 이 코드는 HMC5883L센서를 테스트하는 용도로만 쓰이고, 실제 큐브를 날릴 때는 쓰지 않을 계획이다.
(multiwii의 baseflight 프로젝트는 무한정 대기하는 문제를 이벤트로 해결했다.)
HMC5883L 초기화
HMC5883L_I2C_Init()함수에서는 HMC5883L과 통신을 위한 I2C포트를 설정한다.(PB10-SCL, PB11-SDA) 그리고 SerialSetup()함수에서 센서로부터 얻어 온 정보를 화면에 출력하기 위한 시리얼통신 포트 PA10-Rx, PA9-Tx를 설정한다. InitSysTick()함수는
GetTickCount()함수를 동작할 수 있게 초기화 한다.
HMC5883L_Initialize() 함수에서 +-1.3 Gauss 범위를 설정하고, 싱글모드로 동작하게 한다. 이 옵션들은 모두 기본설정사항이다.

#define HMC5883L_I2C I2C2
#define HMC5883L_I2C_RCC_Periph RCC_APB1Periph_I2C2
#define HMC5883L_I2C_Port GPIOB
#define HMC5883L_I2C_SCL_Pin GPIO_Pin_10
#define HMC5883L_I2C_SDA_Pin GPIO_Pin_11
#define HMC5883L_I2C_RCC_Port RCC_APB2Periph_GPIOB
#define HMC5883L_I2C_Speed 100000
void setup()
{
InitSysTick();
SerialSetup();
HMC5883L_I2C_Init();
HMC5883L_Initialize();
}
/**
* @brief Initializes the I2C peripheral used to drive the HMC5883L
* @param None
* @retval None
*/
void HMC5883L_I2C_Init()
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable I2C and GPIO clocks */
RCC_APB1PeriphClockCmd(HMC5883L_I2C_RCC_Periph, ENABLE);
RCC_APB2PeriphClockCmd(HMC5883L_I2C_RCC_Port, ENABLE);
/* Configure I2C pins: SCL and SDA */
GPIO_InitStructure.GPIO_Pin = HMC5883L_I2C_SCL_Pin | HMC5883L_I2C_SDA_Pin;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(HMC5883L_I2C_Port, &GPIO_InitStructure);
/* I2C configuration */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = HMC5883L_DEFAULT_ADDRESS; // HMC5883L 7-bit adress = 0x1E;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = HMC5883L_I2C_Speed;
/* Apply I2C configuration after enabling it */
I2C_Init(HMC5883L_I2C, &I2C_InitStructure);
I2C_Cmd(HMC5883L_I2C, ENABLE);
}
/** Power on and prepare for general usage.
* This will prepare the magnetometer with default settings, ready for single-
* use mode (very low power requirements). Default settings include 8-sample
* averaging, 15 Hz data output rate, normal measurement bias, a,d 1090 gain (in
* terms of LSB/Gauss). Be sure to adjust any settings you need specifically
* after initialization, especially the gain settings if you happen to be seeing
* a lot of -4096 values (see the datasheet for mor information).
*/
void HMC5883L_Initialize()
{
// write CONFIG_A register
uint8_t tmp = (HMC5883L_AVERAGING_8 << (HMC5883L_CRA_AVERAGE_BIT - HMC5883L_CRA_AVERAGE_LENGTH + 1))
| (HMC5883L_RATE_15 << (HMC5883L_CRA_RATE_BIT - HMC5883L_CRA_RATE_LENGTH + 1))
| (HMC5883L_BIAS_NORMAL << (HMC5883L_CRA_BIAS_BIT - HMC5883L_CRA_BIAS_LENGTH + 1));
HMC5883L_I2C_ByteWrite(HMC5883L_DEFAULT_ADDRESS, &tmp, HMC5883L_RA_CONFIG_A);
// write CONFIG_B register
HMC5883L_SetGain(HMC5883L_GAIN_1090);
// write MODE register
HMC5883L_SetMode(HMC5883L_MODE_SINGLE);
}
void SerialSetup(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// RCC Configuration
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// Port 설정
// PA9 - Tx
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// PA10 - Rx
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// UART Port 설정
USART_InitStructure.USART_BaudRate = 19200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
HMC5883L 센서정보를 가져온다.
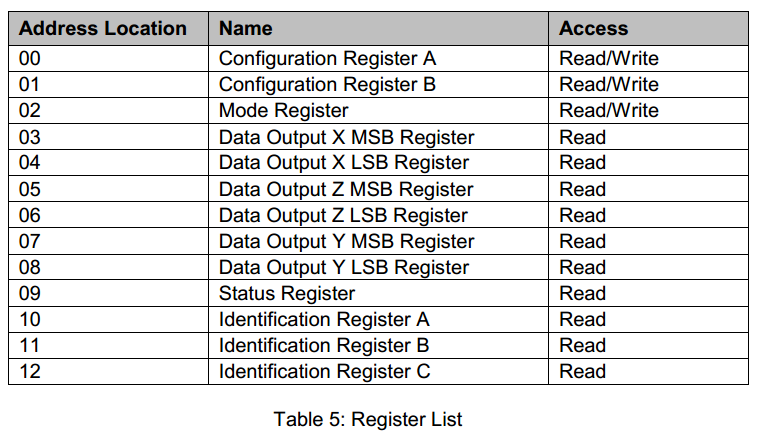
이해할 수 없는 코드가 몇 군데 있지만, 넘어가고 HMC5883L_I2C_BufferRead()함수를 보자. MPU-6050센서와 마찬가지로, 읽어 올 HMC5883L 레지스터 주소를 먼저보내고, 여섯 번 반복해서 Read해서 정보를 가져온다. 레지스터 주소는 HMC5883L_RA_DATAX_H에서 부터 여섯 번 읽어온다. 레지스터 주소는 HAL_HMC5883L.h 헤더파일에 다음과 같이 정의 되어 있다.
Y축과 Z축 레지스터주소가 서로 바꼈지만, 여섯 번을 순서대로 읽기 때문에, 정보가 빠지지는 않는다.
#define HMC5883L_RA_CONFIG_A 0x00
#define HMC5883L_RA_CONFIG_B 0x01
#define HMC5883L_RA_MODE 0x02
#define HMC5883L_RA_DATAX_H 0x03
#define HMC5883L_RA_DATAX_L 0x04
#define HMC5883L_RA_DATAY_H 0x05
#define HMC5883L_RA_DATAY_L 0x06
#define HMC5883L_RA_DATAZ_H 0x07
#define HMC5883L_RA_DATAZ_L 0x08
#define HMC5883L_RA_STATUS 0x09
#define HMC5883L_RA_ID_A 0x0A
#define HMC5883L_RA_ID_B 0x0B
#define HMC5883L_RA_ID_C 0x0C
실제 레지스터 주소는 다음과 같다.
int16_t MagneticHeading[3]={0};
HMC5883L_GetHeading(MagneticHeading);
/** Get 3-axis heading measurements.
* In the event the ADC reading overflows or underflows for the given channel,
* or if there is a math overflow during the bias measurement, this data
* register will contain the value -4096. This register value will clear when
* after the next valid measurement is made. Note that this method automatically
* clears the appropriate bit in the MODE register if Single mode is active.
* @param x 16-bit signed integer container for X,Y,Z-axis heading
* @see HMC5883L_RA_DATAX_H
*/
void HMC5883L_GetHeading(s16* Mag)
{
int i=0;
uint8_t tmp;
uint8_t tmpbuff[6] = { 0 };
HMC5883L_I2C_BufferRead(HMC5883L_DEFAULT_ADDRESS, tmpbuff, HMC5883L_RA_DATAX_H, 6);
tmp = HMC5883L_MODE_SINGLE << (HMC5883L_MODEREG_BIT - HMC5883L_MODEREG_LENGTH + 1);
if (HMC5883Lmode == HMC5883L_MODE_SINGLE)
HMC5883L_I2C_ByteWrite(HMC5883L_DEFAULT_ADDRESS, &tmp, HMC5883L_RA_MODE);
for (i = 0; i < 3; i++)
Mag[i] = ((s16) ((u16) tmpbuff[2 * i] << 8) + tmpbuff[2 * i + 1]);
}
HMC5883L.h 라이브러리는 센서정보를 이렇게 가져오고 끝난다. 이 값은 gauss 단위이지만, 실제 값은 아니고, Scale Factor로 나눠줘야 한다. 만약 센서가 바라보고 있는 방향각만 알고 싶다면 gauss 형변환 없이 바로 atan2(my, mx)로 구할 수 있다.
이렇게 구해진 각은 실제 방향을 구하기위해서 편각(declination)을 더하거나 빼줘야 한다. 왜냐하면 자기장이 가르키는 북극은 실제 북극하고 다르기 때문이다.
Main 함수
HMC5883L_GetHeading()함수로 센서정보를 가져온 후, 바로 SendSerialMagnetometer()함수를 통해 시리얼통신으로 보낸다. x,z,y 순서대로 정보를 받아오고 있다는 것에 주목하자. 이는 HMC5883L 센서의 레지스터 주소 순서 때문이다.
센서가 바라보는 방향을 구할 때, atan2(my, mx)로 계산하는 이유는 MEMS 센서를 이용한 무인항공기용 자세측정장치의 특성에 대한 연구.pdf 문서에 잘 나와 있다. STM32\pdf\MEMS 센서를 이용한 무인항공기용.pdf 경로에 있다.
int main()
{
int curTick=0, oldTick=0;
int16_t MagneticHeading[3]={0};
setup();
if( HMC5883L_TestConnection())
{
// connection success
}
else
{
// connection failed
return 1;
}
while(1)
{
curTick = GetTickCount();
if (curTick - oldTick > 50)
{
HMC5883L_GetHeading(MagneticHeading);
SendSerialMagnetometer(MagneticHeading);
oldTick = curTick;
}
}
}
// 지자기 센서 정보를 시리얼통신으로 보낸다.
void SendSerialMagnetometer( int16_t magnetometer[3] )
{
int16_t mag_x = magnetometer[0];
int16_t mag_y = magnetometer[2];
int16_t mag_z = magnetometer[1];
print_byte( 'S' );
print_short( mag_x );
print_short( mag_y );
print_short( mag_z );
}
레퍼런스
- HMC5883L 라이브러리 저자
- http://blog.bitify.co.uk/2013/12/pitch-roll-and-yaw-using-mpu6050.html
- http://pinkwink.tistory.com/338
- http://thinkslowly.tistory.com/entry/%ED%94%84%EB%A1%9C%EC%A0%9D%ED%8A%B801%EC%BF%BC%EB%93%9C%EC%BD%A5%ED%84%B0-%EC%A0%9C%EC%9E%91010-%EC%A0%84%EC%9E%90-%EB%82%98%EC%B9%A8%EB%B0%98-%EC%99%84%EC%84%B1
- http://zmflftodn.tistory.com/category/%EB%A9%80%ED%8B%B0%EC%BD%A5%ED%84%B0/ArduCopter?page=2
- http://6333.tistory.com/14
- https://learn.adafruit.com/adafruit-hmc5883l-breakout-triple-axis-magnetometer-compass-sensor/wiring-and-test
- MEMS 센서를 이용한 무인항공기용 자세측정장치의 특성에 대한 연구.pdf