5 Conceptual Design - EngineeringExploration20182019B/Repo10 GitHub Wiki
2.1 Problem definition
| Design a pick and place robot for cargo ware house industrialists which should be easily operable, with weight exceeding not more than 2 kgs. It should be user friendly, should safely and properly place the objects, the robot must move with adapter as a source of energy which should be automatic, the cost should not exceed Rs. 5000, it should sense the height of the object type through sensors and place in their respective bin |
|---|
2.2 Write the use case diagram to represent the above system.
| Pick and place Robot System |
|---|
| 1) Conveyor Belt Mechanism |
| 2) Command The Robot |
2.3 Functional structure(write detailed system sub functions for each usecase)
| Use case 1 | Sub Function List |
|---|---|
| Conveyor Belt Mechanism | Action done by the system |
| DC Runs & Conveyor Belt Moves | |
| Placed Object moves | |
| Ultrasonic sensor works | |
| Object is stopped at a distance |
| Use case 2 | Sub Function List |
|---|---|
| Command The Robot | Action done by the system |
| System Reads The Command | |
| Sense the height of the object | |
| Picks the object | |
| Place the object at different angle |
2.4 Complete the morphological chart by exploring the other alternative means of achieving the sub function.
| Function | Mean 1 | Mean 2 | Mean 3 | Mean 4 |
|---|---|---|---|---|
| Movement of Conveyor belt | DC Motor | Stepper Motor | Gear motor | Servo Motor |
| Object Sensing | IR SENSOR | RGB SENSOR | Sonar sensor | Ultrasonic sensor |
| Picking and Placing | Gripper | Hook | Vaccum | End Effector |
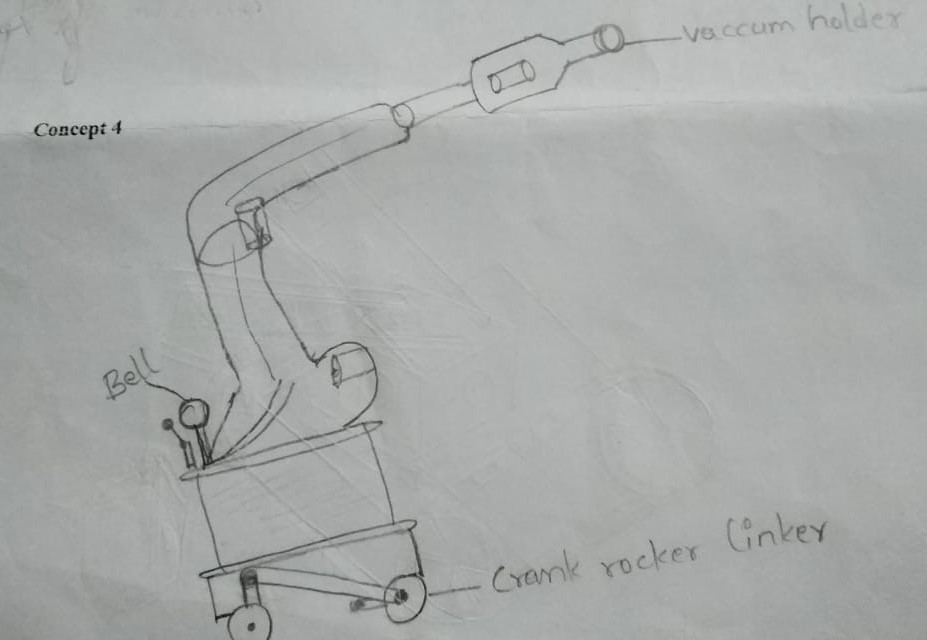
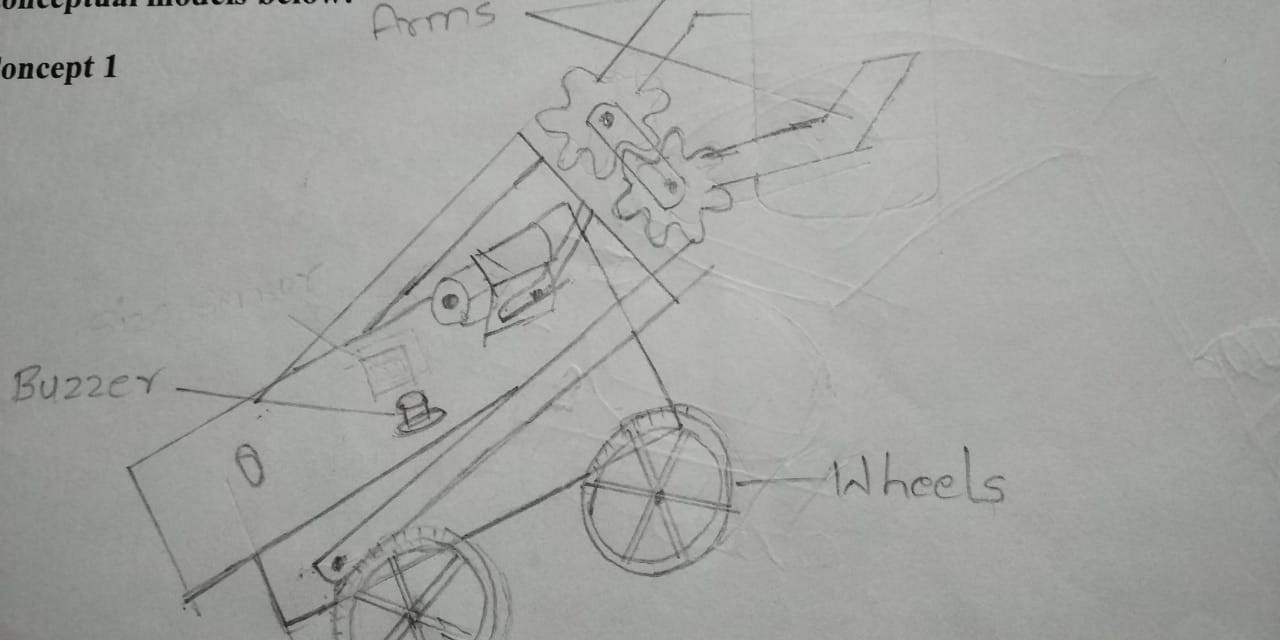
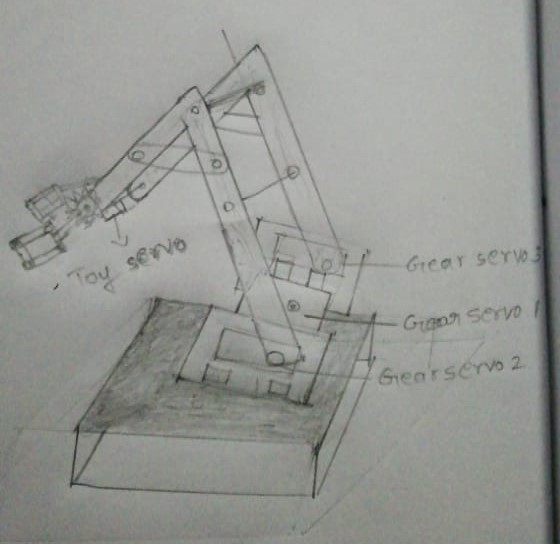
2.5 Draw the four conceptual models below
Concept 1
Concept 2
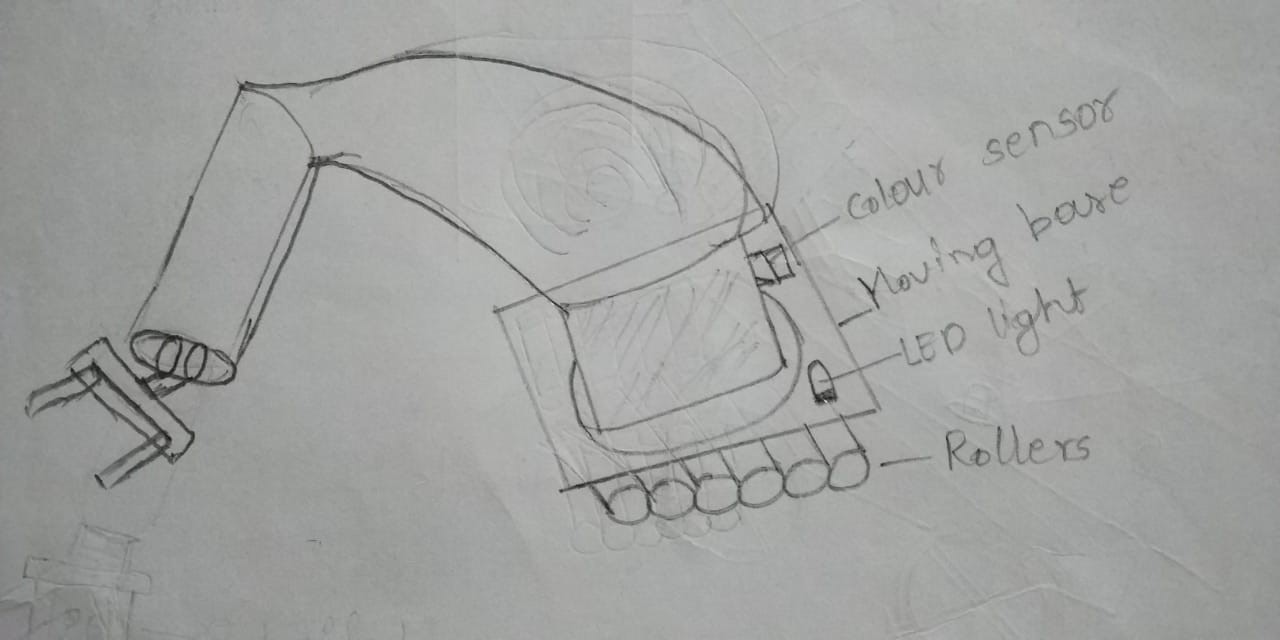
Concept 3
Concept 4