3 Pertinent Information - EngineeringExploration20182019B/Repo10 GitHub Wiki
Introduction
In this highly developing society time and man power are critical constrains for completion of task in large scales. The automation is playing important role to save human efforts in most of the regular and frequently carried works. One of the major and most commonly performed works is picking and placing of jobs from source to destination. The pick and place robot is a micro controller based mechatronic system that detects the object, picks that object from source location and places at desired location.
Robotics is the branch of mechanical engineering, electrical engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.
The pick and place robot are capable to pick an object through sensors and camera that are attached to it and place the object accordingly to the coordinated places. The main idea is to develop application which can reach places where humans cannot reach like space, hidden places and small tunnels. The pick and place robot have three axes and about these three axes only motion occurs.
The following movements are required for this robot: -
A) Clockwise and Anti-clockwise rotation of the robot unit on its base B) Horizontal Linear movement of the arm to extend or contraction C) Up and down movement of the arm [1]
Existing Solution
Robotic Arm
Probably the most common type of pick and place robot is the robotic arm type; which typically come as 5 axis robots for standard pick and place application in plane, or 6 axis robots for more complex application where the products need twisting from the horizontal [2]

Cartesian
The cartesian robot is also a very common type of pick and place robot, that used to be cheaper, but it is now not so commonly installed apart from for injection moulding machines [2]

Fast Pick
Fast pick robots are also another option for pick and place robot; with cycles times as fast as 150 cycles per minute. [2]

Delta
Delta robots are mounted above conveyors and are typically used for high speed pick and place applications [2]

Collaborative
In recent years a wide range of different types of collaborative robot have hit the market and these are becoming increasingly used in industrial application, but they are used in industrial applications, but they are smaller, slower robots with less of the complex functionality available. [2]
DIY PROJECTS
Solar Car
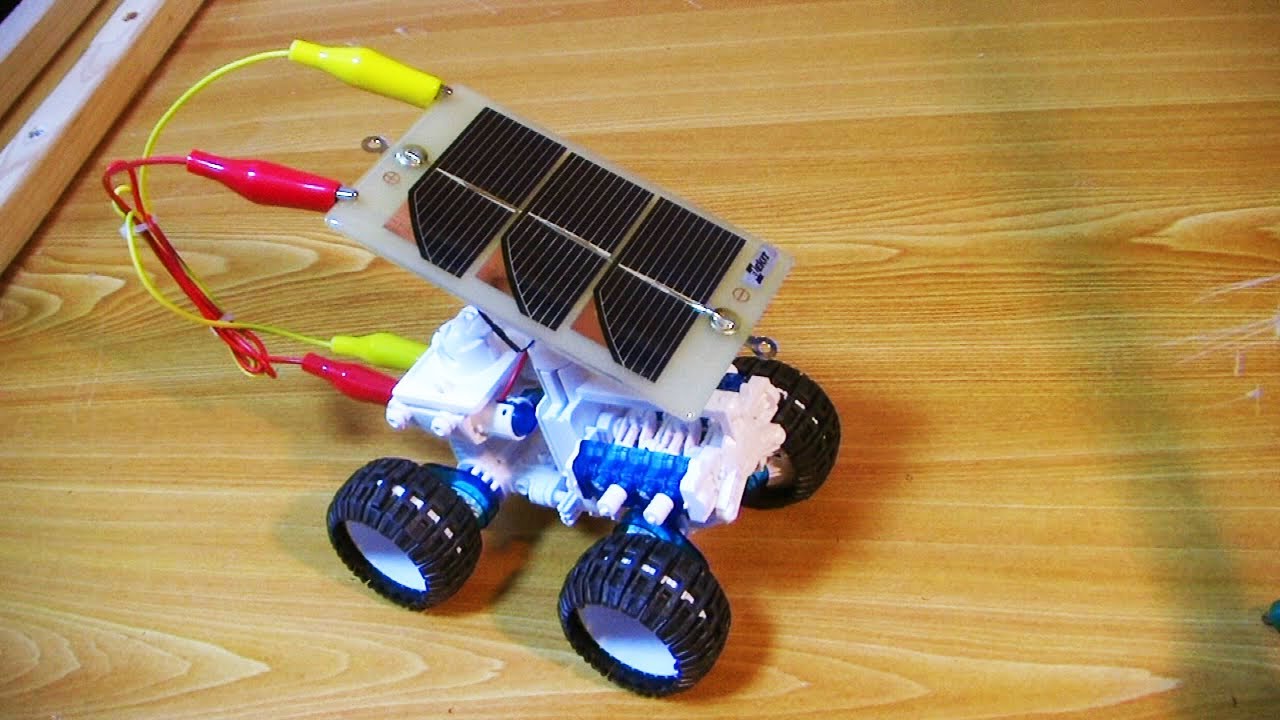
This is a prototype solar car. This is based on the fact that reduces pollution and it is renewable resources-based car i.e. solar energy. The car works on principle of photo voltaic effect. The car is little expensive than normal vehicle or car as it holds a solar panel which is made up of silicon and which is costly enough. The use of this is that it can work as same as the fuel-based vehicle does but the change is one that it doesn’t use any fuel which is non-renewable resources of energy. Hence it is one type of eco-friendly vehicle which is need to our environment as it is getting polluted through the polluted air burnt by the vehicles. The solar panels consist of several solar collectors which stores solar energy and converts to mechanical energy in this case. it does not need any type of external energy until it has solar energy stored in it.
Working Principle
The basic function of a pick and place robot is done by its joints. Joints are analogous to human joints and are used to join the two consecutive rigid bodies in the robot. They can be rotary joint or linear joint. To add a joint to any link of a robot, we need to know about the degrees of freedom and degrees of movement for that body part. Degrees of freedom implement the linear and rotational movement of the body and Degrees of movement imply the number of axis the body can move.
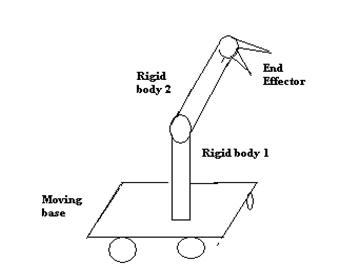
A simple pick and place robot consist of two rigid bodies on a moving base, connected together with rotary joint. A rotary joint is a one which provides rotation in 360 degrees around any one of the axes.
•The bottom or the base is attached with wheels which provide linear movement.
•The 1st rigid body is fixed and supports the second rigid body to which the end effector is provided.
•The 2nd rigid body is provided with movement in all 3 axes and has 3 degrees of freedom. It is connected to the 1stbody with a rotational joint.
•The end effector should accommodate all 6 degrees of freedom, in order to reach all sides of the component, to take up position to any height.
On a whole, the basic pick and place robot works as follows:
•The wheels underneath the base help to move the robot to the desired location.
•The rigid body supporting the end effector bends or straightens up to reach the position where the object is placed.
•The end effector picks up the object with a strong grip and places it at the desired position. [3]
Components needed for this design
Grippers

Actuators
Sensors
Microcontroller
DC Geared Motor

DC Motor

Servo Motor

DIP Switches
Direct Solution that are available for the need statement
There is different solution for the above need statement some of them are shown below
Conveyors
Conveyors are used when materials is to be moved frequently between specific points over a fixed path and when there is sufficient flow of volume to justify the fixed conveyor investment. Conveyor systems allow quick and efficient transportation for a wide variety of materials, which make them popular in the material handling and packing [4]

Material Handling
Material Handling is the movement, protection, storage and control of materials and products throughout the manufacturing, warehousing, distribution, consumption and disposal. As a process, material handling incorporates a wide range of manual, semi-automated and automated equipment and systems that supports logistics and make the supply chain work [5]

Automated Guided Vehicle [AGV]
An automated guided vehicle is a portable robot that follows markers or wires in the floor, or uses vision, magnets, or lasers for navigation. They are most often used in the industrial application to move materials around a manufacturing facility or warehouse [6]

Pallet
A pallet is a flat transport structure, which supports goods in a stable fashion. Pallet is a structural foundation of a unit load which allows handling and storage efficiencies. Goods or shipping containers are often placed on a pallet secured with strapping and shipped. [7]
Uses of pick and place robot in our sourroundings
Used in Industries
Here the pick n place robots are used to carry many heavy tools of automobiles which cannot be carried out by normal human beings. and it can do several tasks at a time and reduces time of humans which is the most precious.
Used in Warehouses
Here the pick and place robots are used to handle many heavy materials at a time which reduces human effort and time.
Used in ports
This is the portal area which is filled with many heavy tools of ships. Many heavy and big tanks and load materials are unloaded by pick and place robots
Cost Estimation For existing solution
Looking at the market, quality, efficiency, built quality and user friendliness of the product. People would pay about Rs 5000-6000
Reference links
[1] - https://www.elprocus.com/pick-n-place-robot/
[2] - https://www.granta-automation.co.uk
[3] - https://www.elprocus.com/pick-n-place-robot/
[4] - https://www.bastiansolutions.com/solutions/technology/conveyor-systems
[5] - www.mhi.org/fundamentals/material-handling
[6] - https://www.bastiansolutions.com/solutions/technology/automated-guided-vehicles
[7] - https://packagingrevolution.net/pallets-introduction-to-pallet-usage/