6.Product Architecture - D-Division-2019-2020-Odd/Repo-14 GitHub Wiki
Weightage for objectives
| Objective | Weightage |
|---|---|
| Stability | 4 |
| complexity in mechanism | 3 |
| Cost efficient | 5 |
| attractive | 2 |
| Speed | 1 |
PUGH Chart
| Objectives | Design 1 | Design 2 | Design 3 | Design 4 |
|---|---|---|---|---|
| Stability | - | + | 0 | Datum |
| complexity in mechanism | -- | - | 0 | Datum |
| Cost efficient | - | + | + | Datum |
| attractive | - | ++ | -- | Datum |
| speed | -- | -- | -- | Datum |
| Score + | 0 | +13 | +5 | 0 |
| Score - | -19 | -5 | -6 | 0 |
| Total | -19 | 8 | -1 | 0 |
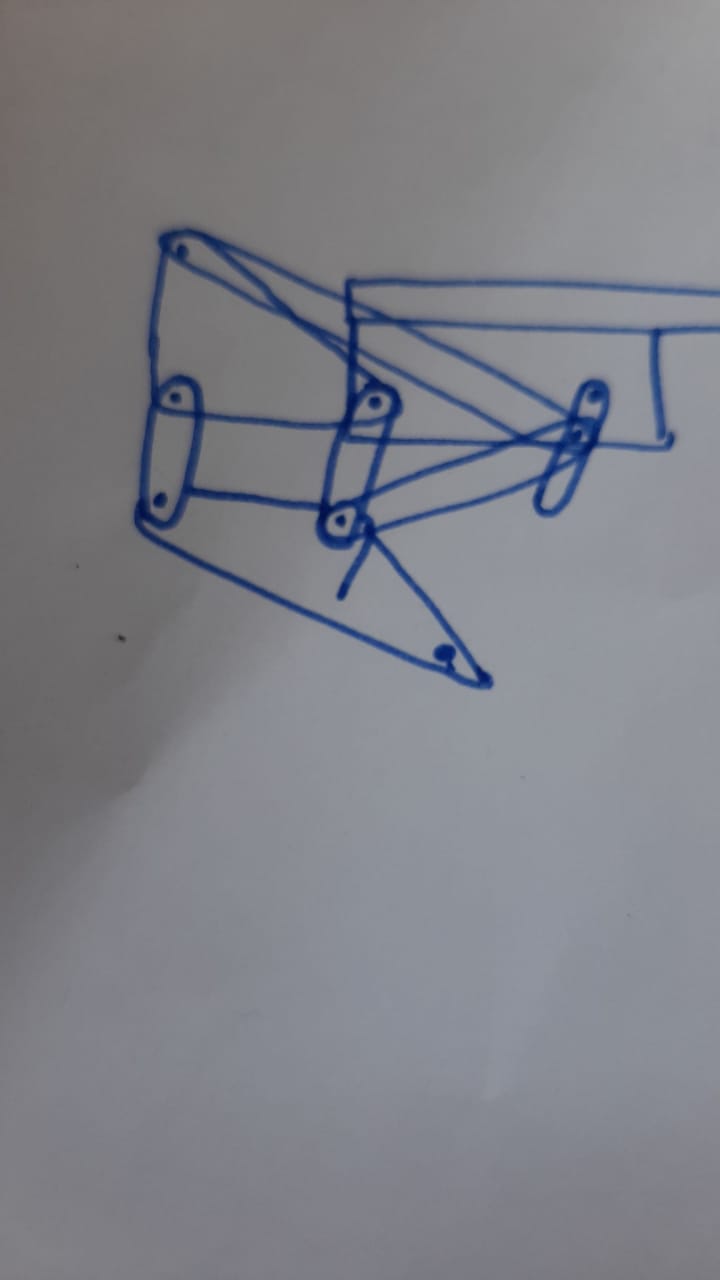
The best design chosen is:
- Design 2: Theo Jansen mechanism
Justification
| Design no. | Objective | rating | Justification |
|---|---|---|---|
| 1 | stability | - | There are less linkages and actuator is at every leg |
| Complexity in mechanism | -- | Designing too many links will have errors and in mechanism | |
| Cost efficient | - | there are many links which makes the reduction in power so high torque motors are used | |
| Attractive | - | Many links involved in mechanism will make it look different from an actual animal walking | |
| Speed | -- | due to high torque motors used speed is reduced |
| Design no. | Objective | Rating | Justification |
|---|---|---|---|
| 2 | stability | + | There are too many linkages which may reduce coordination and lose stability |
| Complexity in mechanism | - | here, simple 4 bar mechanism is used | |
| Cost efficient | + | there are less links used so low torque motors can be used | |
| Attractive | ++ | less links involved in mechanism will make it look like an actual animal walking | |
| Speed | -- | due to high RPM motors used speed is high |
| Design no. | Objective | Rating | Justification |
|---|---|---|---|
| 3 | stability | 0 | There are too many linkages which may reduce coordination and lose stability |
| Complexity in mechanism | 0 | Designing too many links will have errors and in mechanism | |
| Cost efficient | + | there are less motors used | |
| Attractive | -- | The walking mechanism is totally different from insect walking | |
| Speed | -- | due to low rpm motors used |
| Design no. | Objective | Rating | Justification |
|---|---|---|---|
| 4 | stability | DATUM | There are too many linkages which may reduce coordination and lose stability |
| Complexity in mechanism | DATUM | Designing too many links will have errors and in mechanism | |
| Cost efficient | DATUM | there are more links used so high torque motors are used | |
| Attractive | DATUM | Many links involved in mechanism will make it look different from an actual animal walking | |
| Speed | DATUM | due to low RPM motors used speed is less |
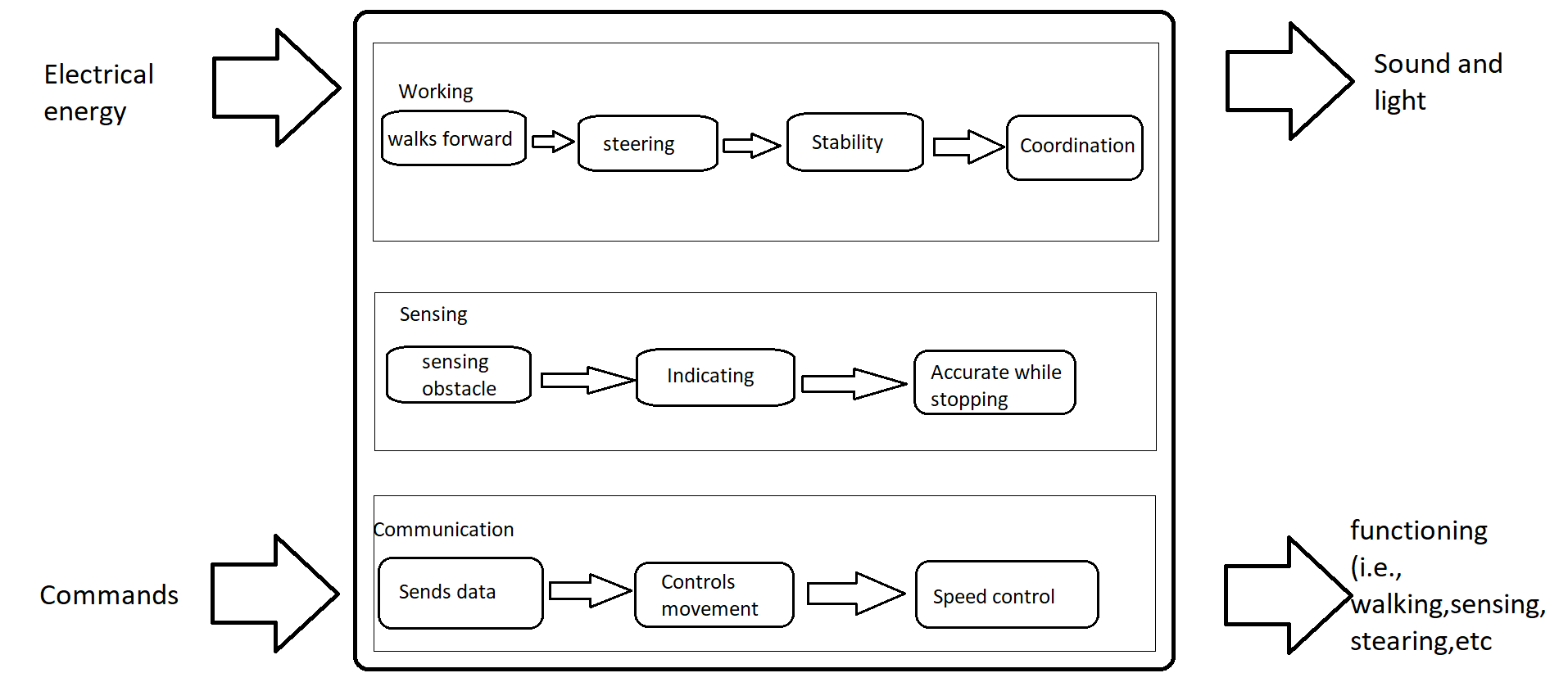
Functional Chart
Glass Box
Clustering of Glass box
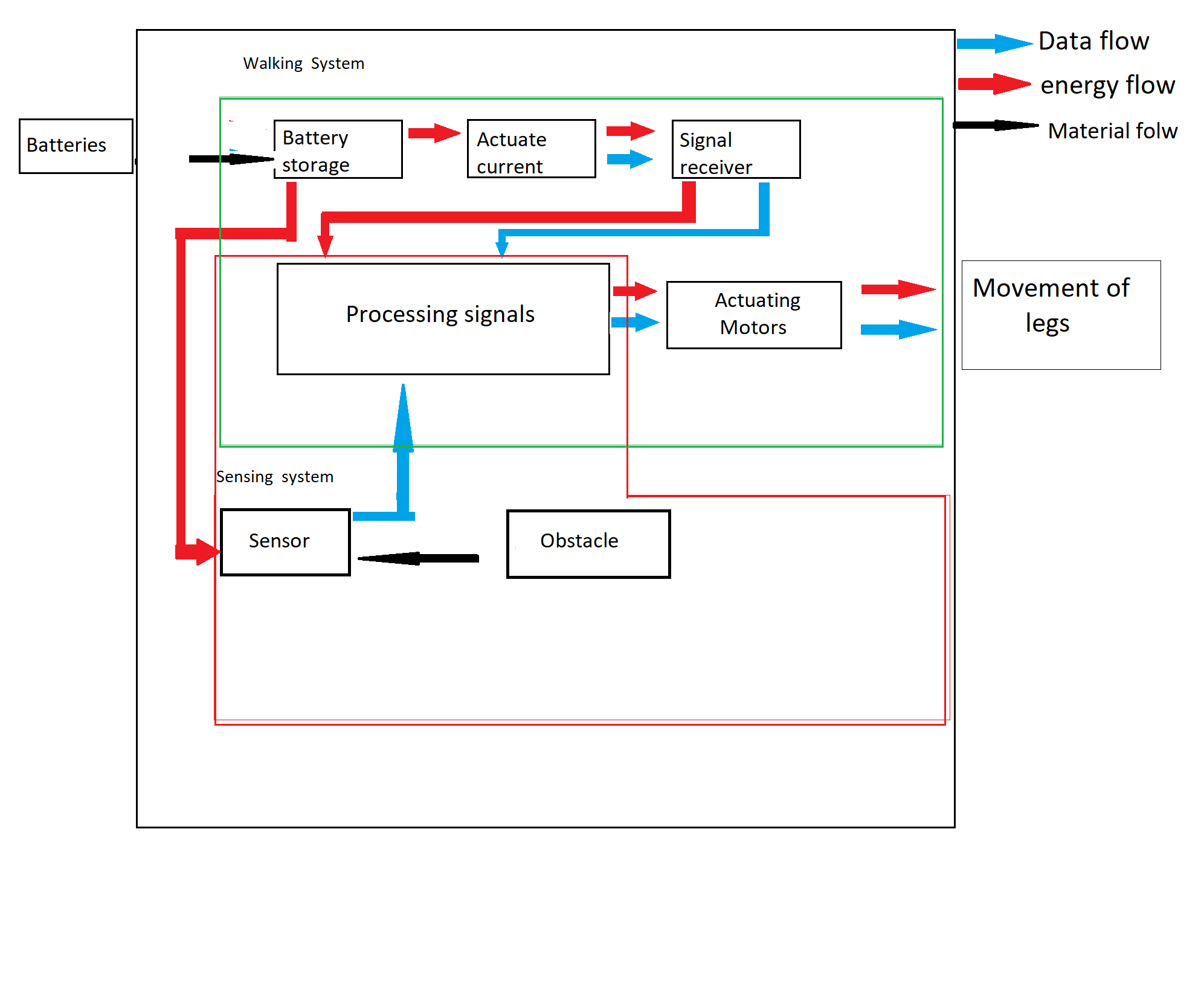
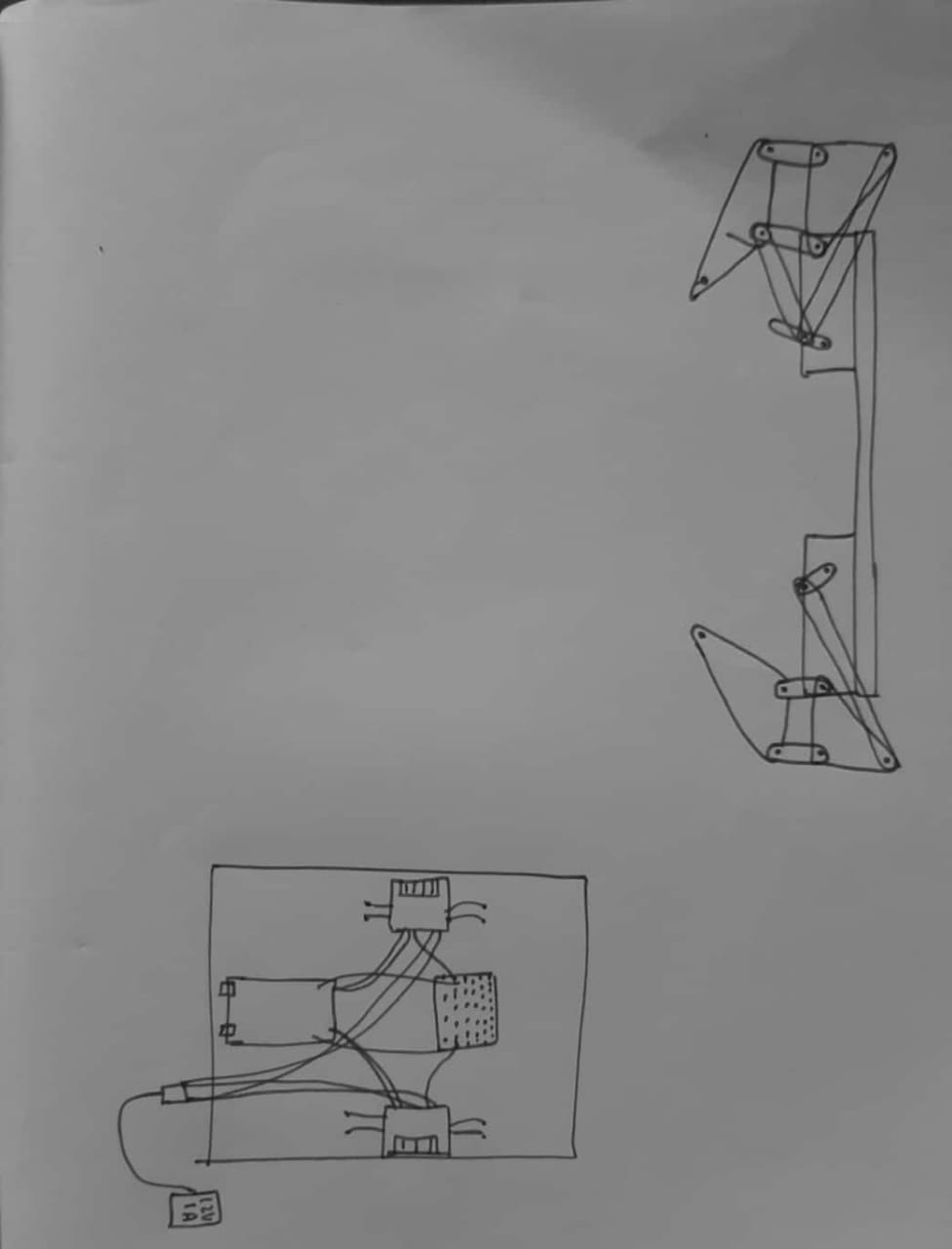
List of sub-system
- Walking unit
- Controling unit
Subsystem intraction table
- Walking unit
| components | Energy | Data | Material | spatial arrangement |
|---|---|---|---|---|
| Battery storage | 0 | 0 | 1 | 1 |
| Actuate current | 1 | 0 | 0 | 0 |
| Signal receiver | 1 | 1 | 0 | 0 |
| processing signals | 1 | 1 | 0 | 1 |
| Actuating motors | 1 | 1 | 0 | 0 |
| movement of legs | 1 | 1 | 0 | 1 |
- Controling unit
| components | Energy | Data | Material | spatial arrangement |
|---|---|---|---|---|
| sensor | 1 | 0 | 1 | 1 |
| obstacle | 0 | 0 | 0 | 0 |
| processing signal | 0 | 1 | 0 | 1 |
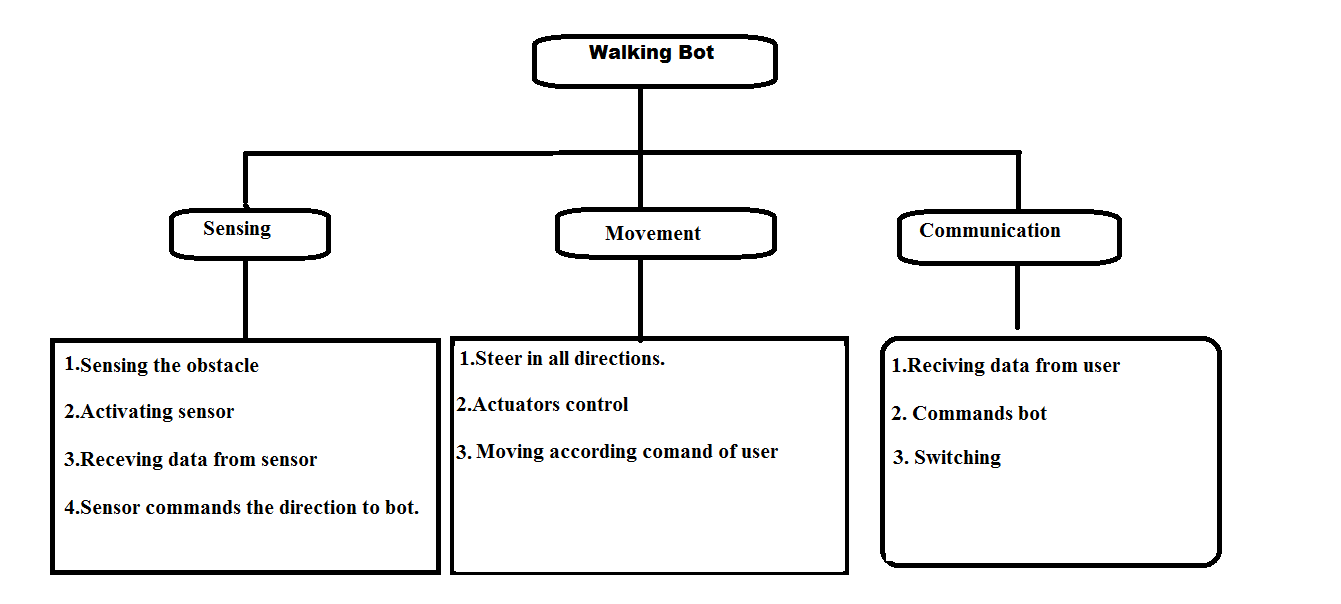
Concept Hierarchy