5.Concept Generation - D-Division-2019-2020-Odd/Repo-14 GitHub Wiki
>PROBLEM DEFINITION
A school is interested to showcase in its biology lab about how different animals and insect walk. They desire that
there must be atleast 6-8 different walking bots so that the children can learn about diversity in the way the bones
are arranged for walking.
Additionally the children must also be able to interact with the bots and control their movements. Due to space
constraints in the lab, the bot must be as small as possible.
It should be attractive,safe & easy to use. With easy movement and stability.
It should not cost more then 4000 rs.The weight of the bot should be 1.5 kg.
The battery should come upto 2hrs per charge.
The dimensions of the bot should 1ft * 1ft * 1ft and should be completed within 3 months.
It should Steer in all directions.
It should be able to sense the object.
It should demonstrate proper walking mechanism.
It should have proper communication with controller and bot.
It should indicate the presence of obstacle.
Use case study
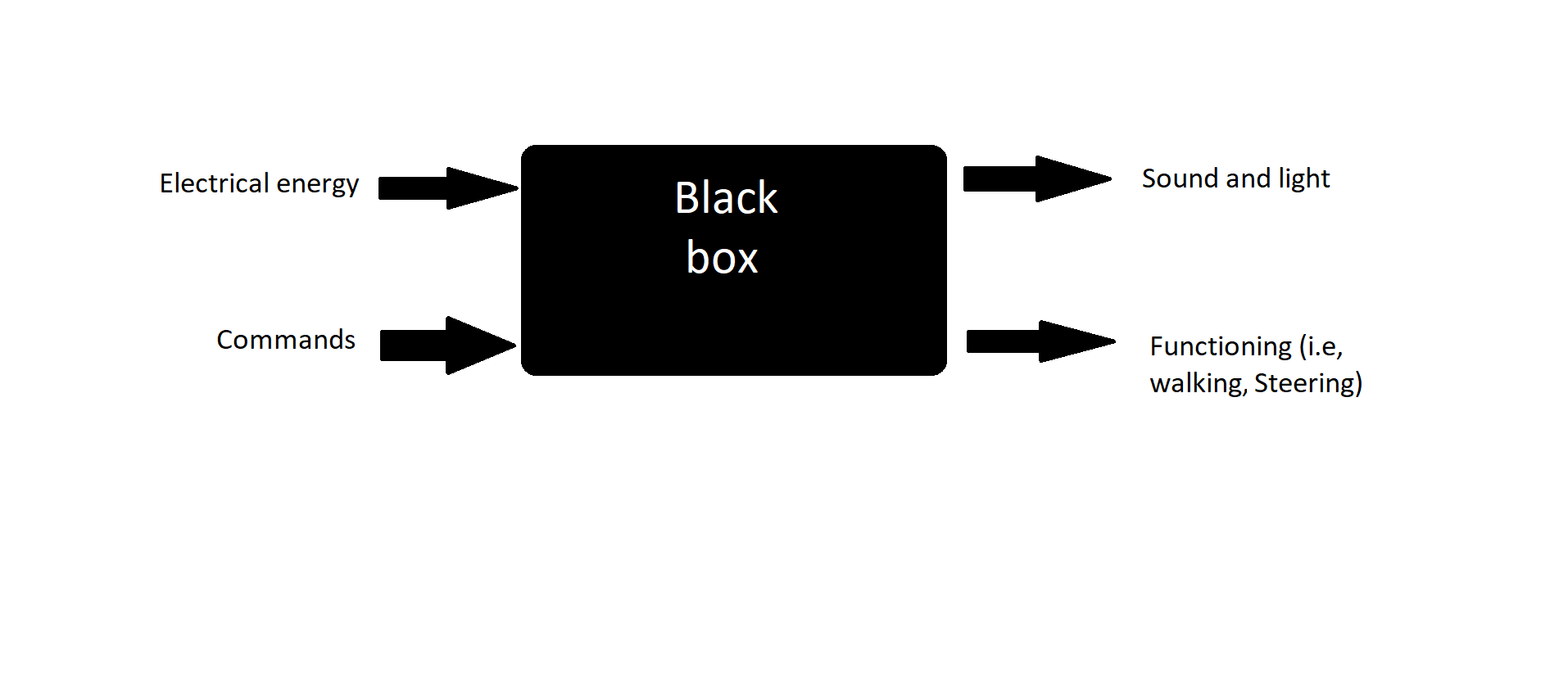
INPUTS AND OUTPUTS OF THE SYSTEM.
Table 4
| Inputs | Outputs |
|---|---|
| 1.Sensing | 1.Movements |
| 2.Commands | 2.Sounds |
| 3.LED light | |
| 4.Wireless communication |
>User action v/s System action
Functions
table 5: Walking mechanism
| User action | System action |
|---|---|
| User starts the bot | bot starts |
| User gives the command with controller | Controller sends the command |
| Bot receives the command sent | |
| Bot analyses the command sent | |
| Bot starts walking |
Table 6: Sensing
| User action | System action |
|---|---|
| Bot senses the obstacle | |
| Bot indicates to the user | |
| Bot stops walking | |
| User gives command to take turn | Bot receives command |
| Bot analyses the command | |
| Bot takes turn |
Table 6: Communication
| User action | System action |
|---|---|
| User gives command via controller | Controller sends command |
| Bot receives command | |
| Bot analyses the command | |
| Bot functions |
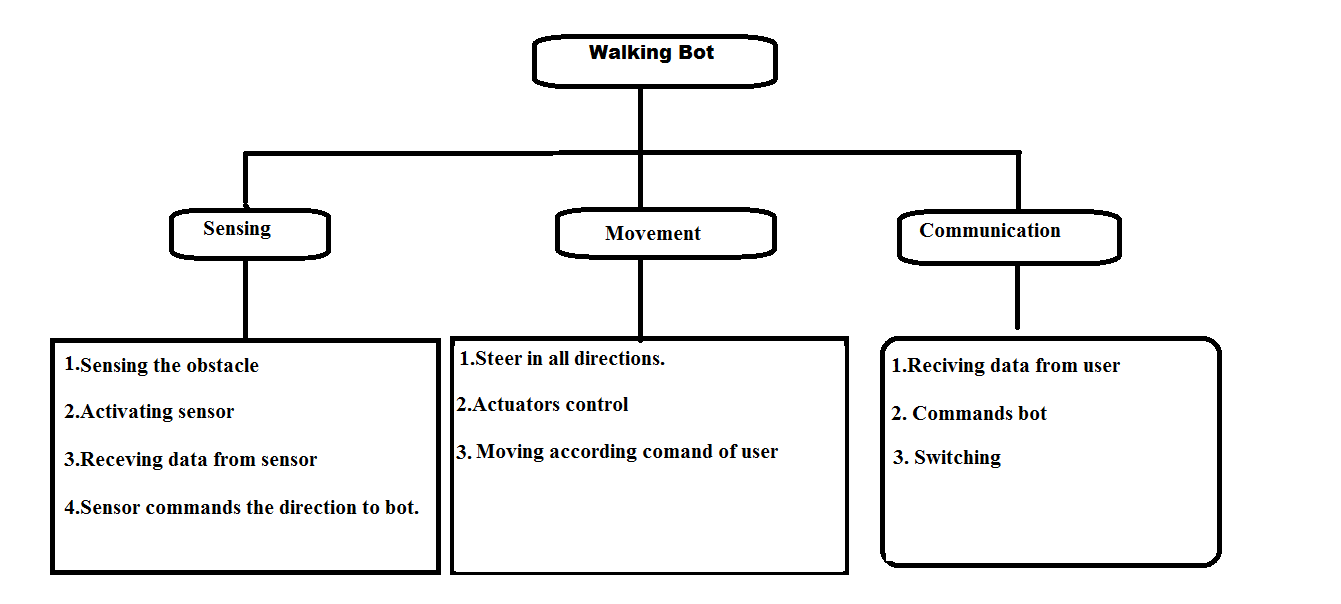
Functional Chart
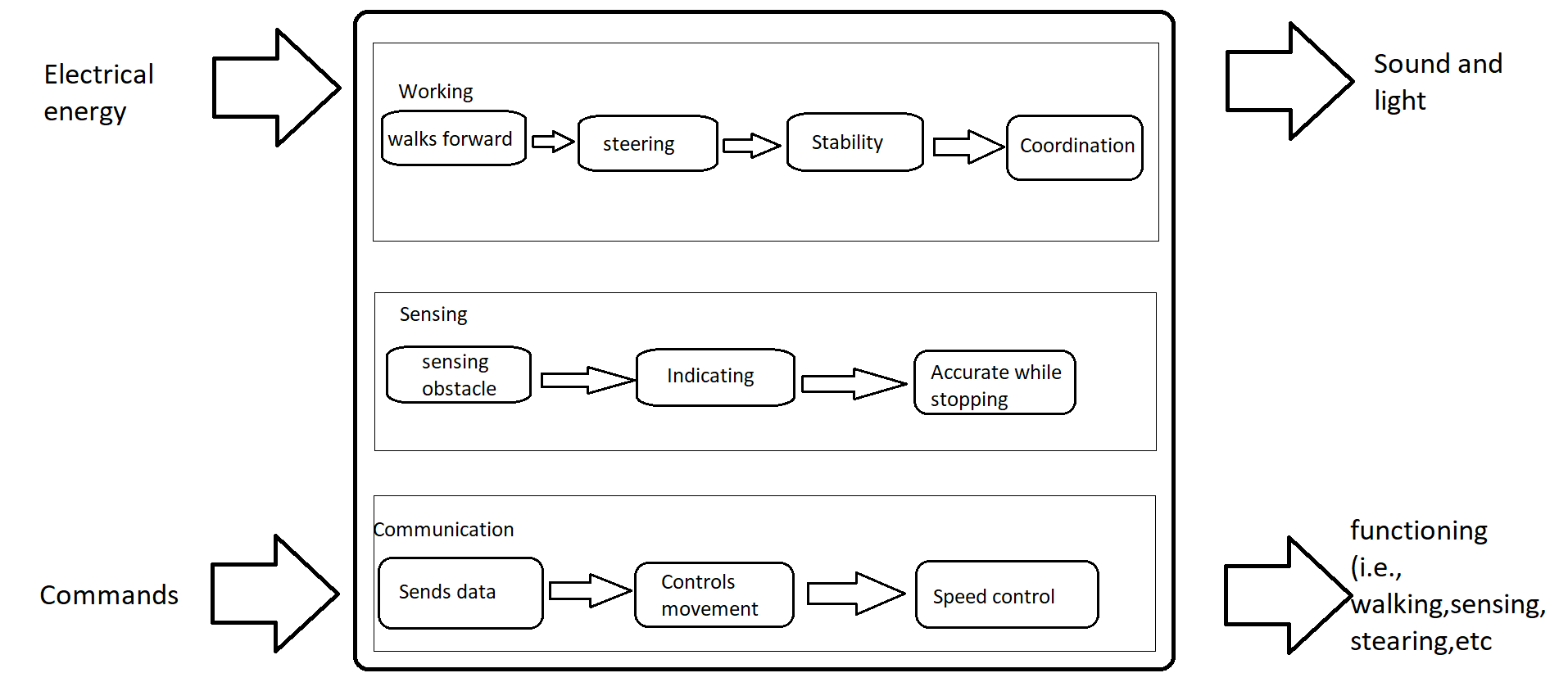
Glass Box
Morphological Chart
| Functions | Mean 1 | Mean 2 | Mean 3 | Mean 4 |
|---|---|---|---|---|
| 1.Sensing | IR sensor | Ultrasonic sensor | PIR sensor | proximity sensor |
| 2.Connectivity | Wired communication | Bluetooth | Wi-fi | Radio controller |
| 4.Actuators | Stepper motor | DC motor | Servo motor | |
| 5.Walking mechanism | Klann's linkage mechanism | extra simple walker | Chebyshev's lambda mechanism |
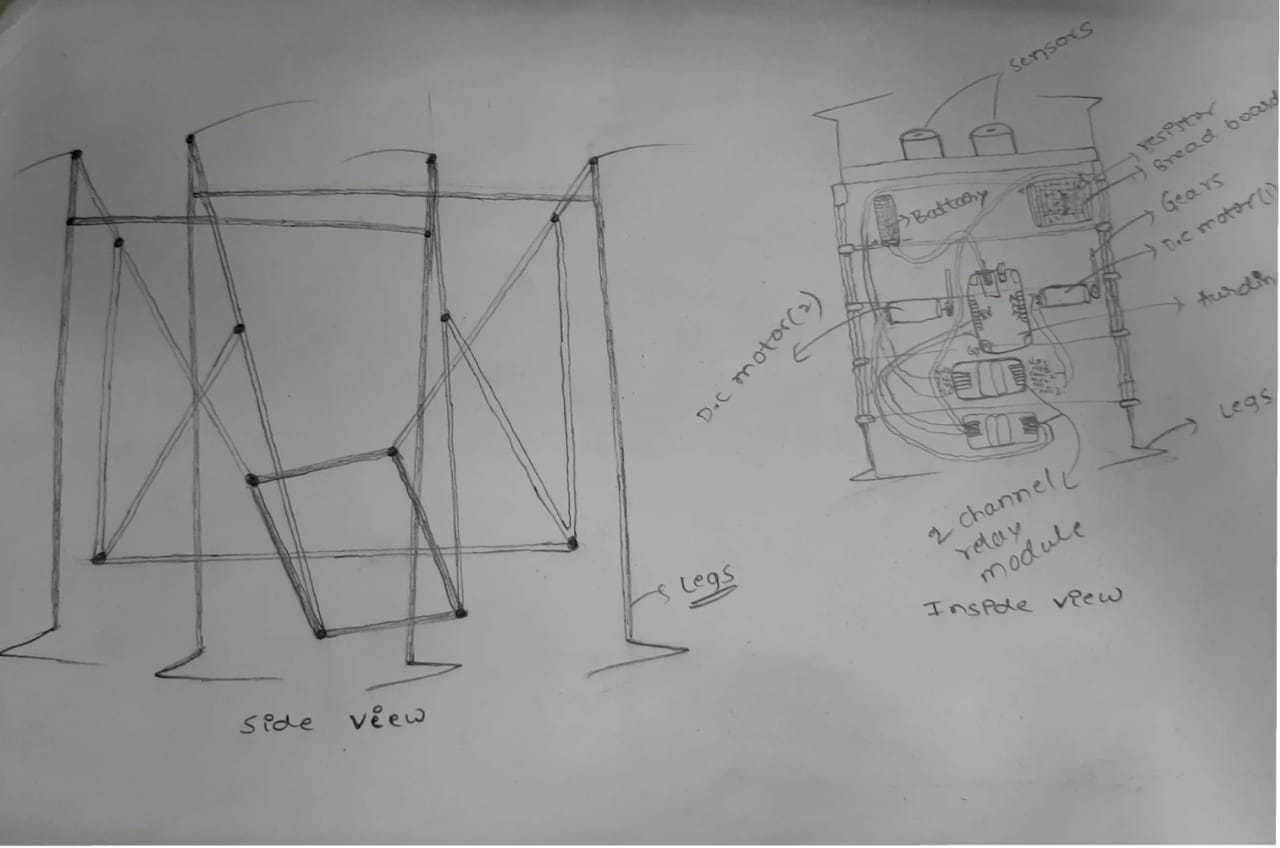
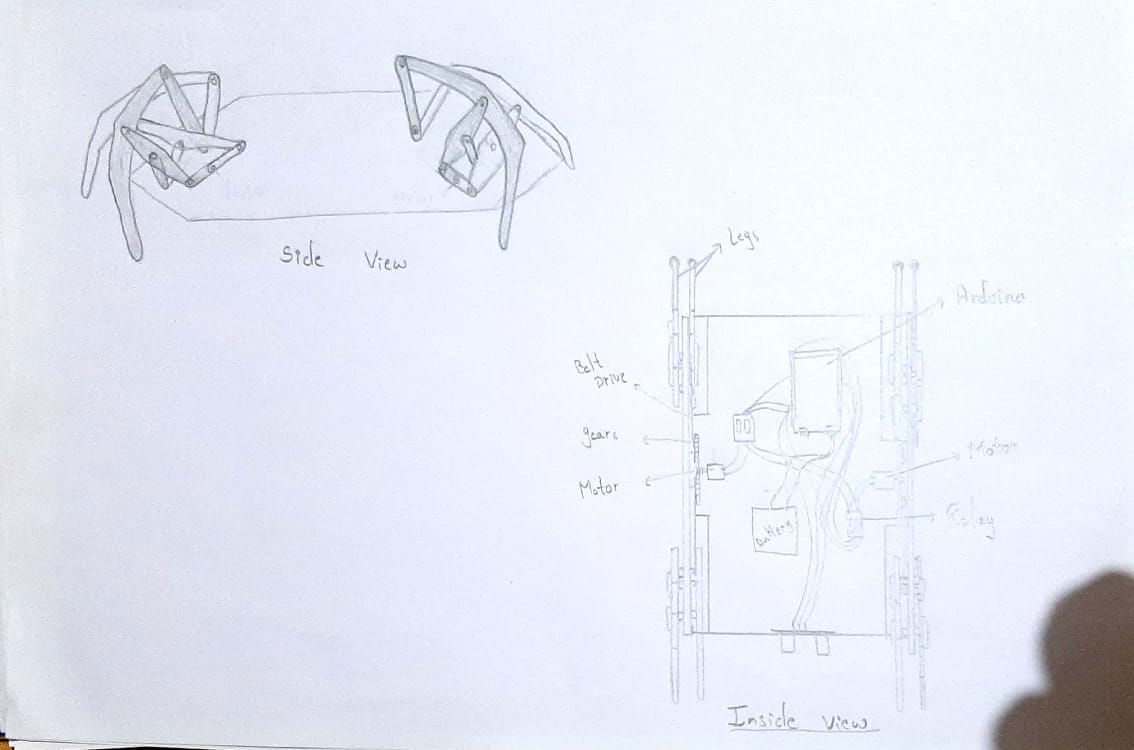
Concept Designs
- Design 1: Simple walker mechanism
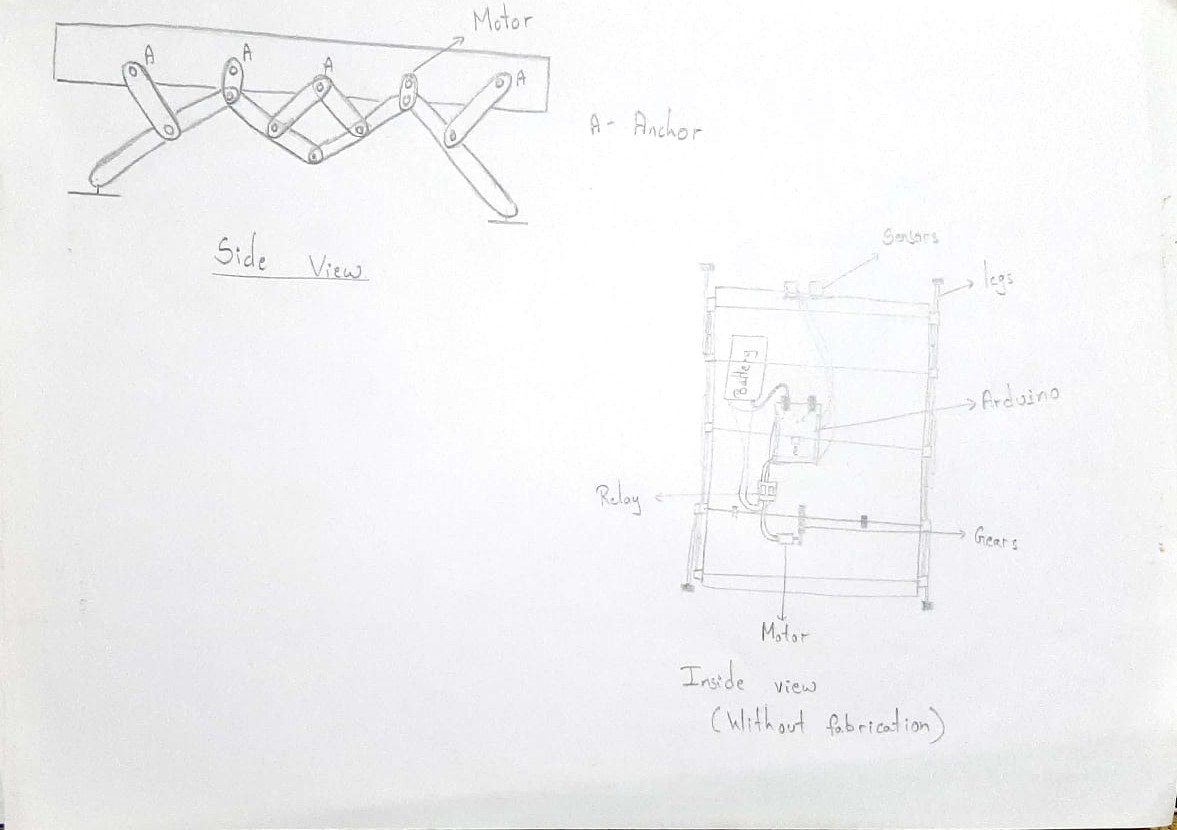
-
Design 2: Theo Jansen mechanism
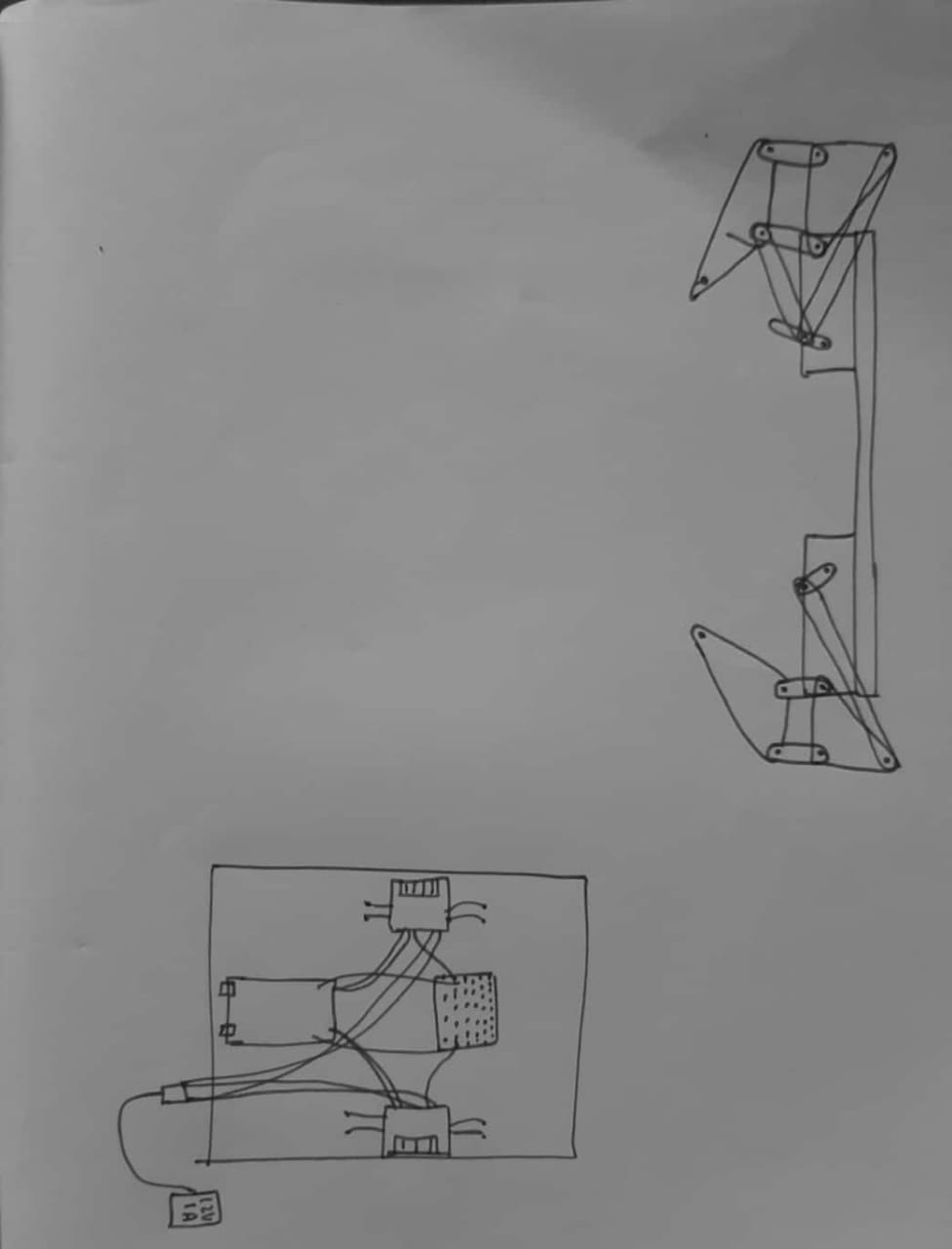
-
Design 3: Klenn's Walker mechanism
- Design 4: Chebyshev's lambda mechanism