How to run simulation - Angelbots1339/ProgramingLessons GitHub Wiki
-
Select the WPI logo (Or press Ctrl-Shift-P)
-
Look up and select Simulate Robot Code !Pasted image 20230809175640.png
-
Make sure sim GUI is selected
-
Select OK !Pasted image 20230809175912.png
!Pasted image 20230809180217.png The following items are shown on the simulation GUI by default:
- Robot State - This is the robot’s current state or “mode”. You can click on the labels to change mode as you would on the normal Driver Station.
- Timing - Shows the values of the Robot’s timers and allows the timing to be manipulated.
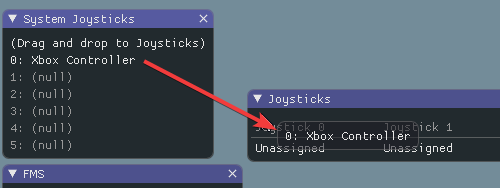
- System Joysticks - This is a list of joysticks connected to your system currently
- FMS - This is used for simulating many of the common FMS systems.
- NetworkTables - This shows the data that has been published to NetworkTables.
- Joysticks - This is joysticks that the robot code can directly pull from.
- Other Devices - This includes devices that do not fall into any of the other categories, such as the Talon FXs used in the lessons
To add a joystick from the list of system joysticks, simply click and drag a shown joystick under the “System Joysticks” menu to the “Joysticks” menu”.
{kind=link}
{kind=link}
{kind=link}