ED2 - A-Division-2018-2019/Team-8 GitHub Wiki
Task 2.1: For the chosen need statement, write the problem definition
Design a device that can aid amputee to perform tasks like grabbing the objects, lifting and moving the objects. The device is targeted to help people irrespective of age. Designed device should be safe to use, affordable with less human interface. Device should not cost more than Rs 6,000 and should not weigh more than 5 kilograms
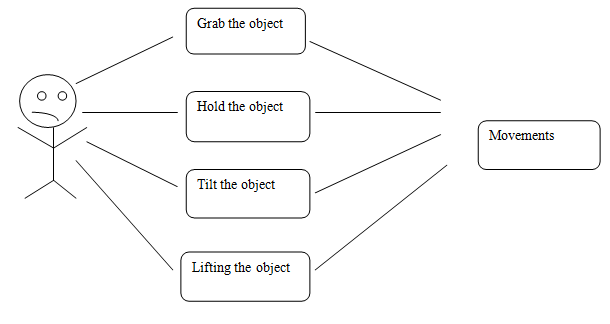
Task 2.2: Write Use case diagram to represent the above system.
Task 2.3: Functional Structure(Write detailed system sub functions for each Usecase)
| Functions | Subfunctions list |
|---|---|
| 1.Holding the object | Machine read the command given by the user |
| Machine grab the object | |
| 2.Lifting the object | Machine read the given command |
| Machine grab the object | |
| Machine lift the object in particular direction | |
| 3.Tilting the object | Read the command |
| Machine grab the object | |
| Machine read the desired angle | |
| Machine lift the object and later on it tilt it to the desired angle |
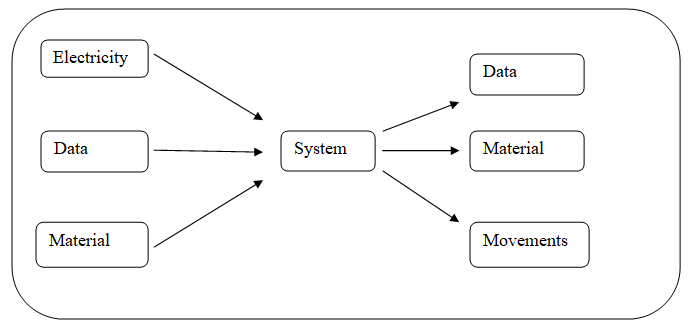
Task 2.4: List the inputs, outputs of the system and represent black box model
| Inputs | Outputs |
|---|---|
| 1.Electricity | 1.Grabbing |
| 2.Signals | 2.Lifting |
| 3.Tilting angles | 3.Tilting |
Black Box Representation
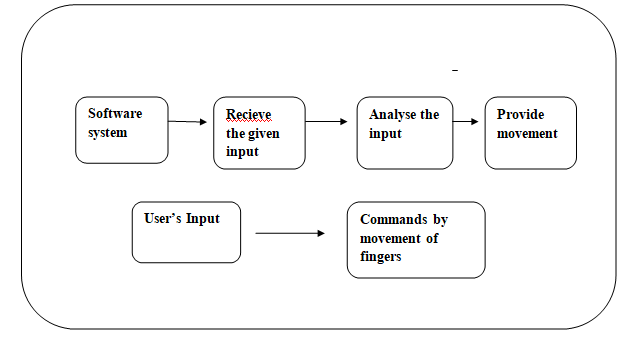
Glass Box Representation
Complete the morphological chart by exploring the other alternative means of achieving the subfunctions
| Functions | Mean 1 | Mean 2 | Mean 3 | Mean 4 |
|---|---|---|---|---|
| 1.Material | Plastic | Metal | Carbon fiber | - |
| 2.Power | Electricity | Inverter | Battery | Solar |
| 3.Movements | Lifting | Grabing | Tilting the object | - |
In the above table draw the selection path showing the conceptsDraw the four conceptual models below.
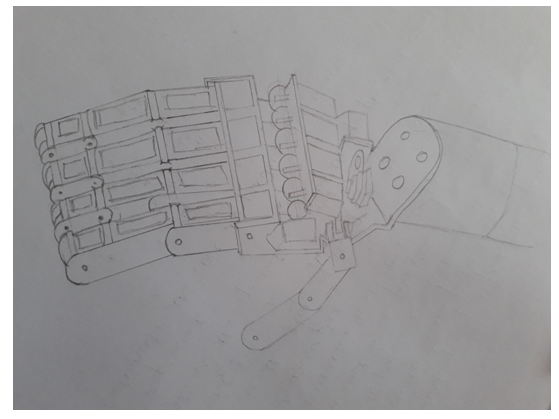
Concept 1
prosthetic wrist
The functionality of a prosthetic device for the upper limb may be increased by incorporation of an additional degree of freedom. A prosthetic wrist joint with flexion and extension allows the manipulation of objects in different ways. Reaching for objects or other dynamic movements is essential in the activities of daily living for all amputees. The range of motion of the upper limb is influenced in a physiological manner by the addition of such a degree of freedom.
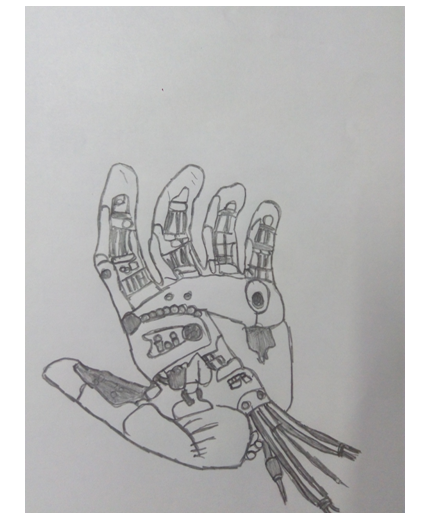
Concept 2
Myo Electronic Prosthetic Wrist
It is capable of gripping a variety of differently shaped objects. The prosthetic hand also mimics the movement of the human hand to a satisfactory degree. The hand is capable of lifting 250 g with the cylindrical grip. The grip strength can be further improved.The hand is capable of lifting suitable weights for eating and drinking purposes and is able to carry loads up to 500 g as per the initial specifications.The purpose of this research was to design and build of myo-electrically controlled prosthetic hand that is capable of using an adaptive grip to grasp different shaped objects. The hand needs to have individually actuated fingers and wrist capable of rotation.
Concept 3
Mind Controlled Prosthetic Wrist
Engineers from Kyoto’s Advanced Telecommunications Research Institute have demonstrated how people can be taught to control a third robotic arm with their brains, even using the limb to multitask. As described in a paper published in the journal Science Robotics today, eight of 15 test subjects were able to successfully balance a ball on a board with their hands, while grabbing a water bottle with a brain-controlled robot arm. Armed with this motory and sensory data, the team then programmed the prosthetic arm to move its fingers depending on which part of the brain was lighting up. They wired the prosthetic up to the electrodes in the patient's brain and instructed him to think about moving each of his fingers, finding that the electrical signals were enough to trigger the movement of the corresponding prosthetic fingers.
Concept 4
Mobile Software controlled prosthetic Wrist
The "mind control" is enabled by connecting a patient's nerves to the socket, with a special Bluetooth bracelet to receive the signals. It takes three surgeries to make it happen, though, including one to insert the a metal rod into a patient's bone , one to implant the piece that will eventually connect the robot arm, and a third -- performed by a specialized plastic surgeon -- to connect all the nerves that used to control the patient's hand muscles to the upper arm stump. This amplifies the neural signals, which helps when the patient is healed and imagines opening and closing their hand
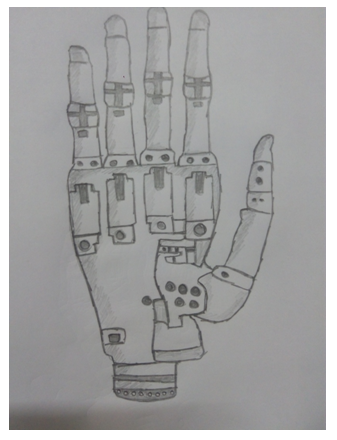
Concept 5
Robotic Forearm
The prosthetic hand mimics the appearance of a natural human hand, affecting the acceptance of the prosthesis by an amputee.It has power grip strength.It is capable of scaling based on user driven dimensions.
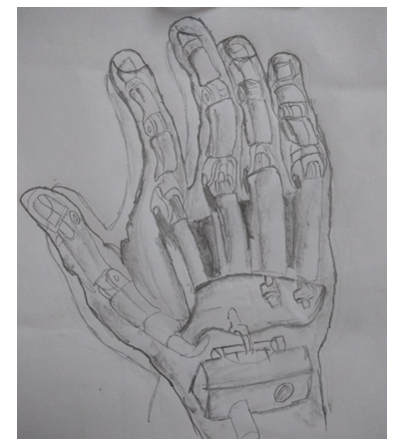
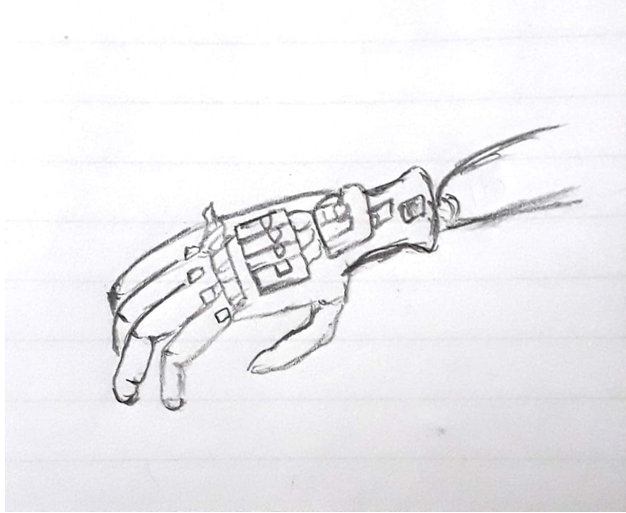
Concept 6
Bluetooth Controlled Prosthetic Wrist
As shown above this prostetic wrist can grab the things easly and can even use them.The prosthetic wrist can tilt the object after grabbing .