pertinent information - 01fe18bcv043/Pertinent-Information GitHub Wiki
. Sources
-
Debroh Levine Gera (2003).Ancient Greek Ideas on speech, Langauages, and Civilization.ISBN978-0-19-925616-7.Retrived 31 December 2007
-
Currie, Adam (1999).”The History of Robotics”.Retrived 10 september 2007.
-
How do RC servos Work?http//www.remodelrevies.com/howservoswork02.shtml
-
Electronics Data book(1998).http//www.circuitidears.com
-
Douglas W.Jones.Restom Condit Microchip TechnologyInc.University of lowa
-
pic16F877A and 16F628A Data Sheet:http://www.microchip.com/
-
Douglas,V.H.”Microprocessor and Interfacing”.Tata McGraw-Hill.New Delahi;2nd Edition,1999
-
Brian Kernighan,Dennis Ritchie:The C programming Language.1st .Prentice Hall 1978;ISBN 013-110163-3.Pre_ANSIC.2nd Prentice Hall 1998;ISBN 0-13-110362-8. ANSIC.
-
Hunt.k and Primrose,E(1993).Assembly configurations of some in-parallel-actuated platforms.Journal of Robotic systems.6(6):703-720.
-
http://www.youtube.com ,pic and place robot final year assignment mechatronics.
Information Collected of Pick and Place Robot
Robotic pick and place automation speeds up the process of picking parts up and placing them in new locations, increasing production rates.
With many end-of-arm-tooling options available, pick and place robots can be customized to fit specific production requirements. Moving large, small, heavy, or hard-to-handle products can be an easy task to automate in the factory line.
Consistency is also a benefit of using a pick and place system. The robots can be easily programmed and tooled to provide multiple applications if required.
An increase in output with a pick and place robot system offer long-term savings to companies. With the advancements in technology and affordability of robots, more pick and place robotic cells are being installed for automation applications.
A pick and place robot is the one which is used to pick up an object and place it in the desired location. It can be a cylindrical robot providing movement in horizontal, vertical and rotational axes, a spherical robot providing two rotational and one linear movement, an articulate robot or a scara robot (fixed robots with 3 vertical axes rotary arms).
Advantages Before moving further, let us see few reasons why pick and place robots are preferred:
• They are faster and can get the work done in seconds compared to their human counterparts.
• They are flexible and have the appropriate design.
• They are accurate.
• They increase the safety of the working environment and actually never get tired

- TYPES OF PICK AND PLACE ROBOTS:
1.RoboticArm Probably the most common type of pick and place robot is the robotic arm type; which typically come as 5 axis robots for standard pick and place application in plane, or 6 axis robots for more complex applications where the products needs twisting from the horizontal

2.Cartesian
The cartesian robot is also a very common type of pick and place robot, that used to be cheaper, but is now not so commonly installed apart from for injection moulding machines

3.Delta
Delta robots are mounted above conveyors and are typically used for high speed pick and place applications.

4.FastPick
Fast pick robots are also another option for fast pick and place applications; with cycle times as fast as 150 cycles per minute.

5.Collaborative
In recent years a wide range of different types of collaborative robots have hit the market and these are becoming increasingly used in industrial applications, but they are mostly smaller, slower robots with less of the complex functionality available. This limits their usefulness for some applications

INSTALLATION OF THIS ROBOTS:
Installing and commissioning robotic systems requires a wide range of skilled automation engineers; from robot programmers and PLC programmers through to mechanical engineers and CAD design engineers.
TYPES OF ROBOTIC PICKS:
Small Robotic Pick and Place System Small robotic pick and place systems are usually used where the product is small, and the distance that the product needs to be moved is short. Some example applications where a small pick and place system would be appropriate include; packing chocolates into boxes, transferring small items from a conveyor to a tray or conveyor, placing components into a circuit board and orientation of small parts
 that come together. Some example applications of a medium pick and place system include; moving products between machines, movement of products within a food production process, and assembly of components.
that come together. Some example applications of a medium pick and place system include; moving products between machines, movement of products within a food production process, and assembly of components.

Conclusion
Whilst this post gives you a broad overview of the different types of robotic pick and place systems, it is always important to have your own requirements professionally assessed to ensure you receive the optimum solution to meet your needs. Along with many other benefits, a truly bespoke pick and place system will enable you to increase efficiency, reduce product defects, improve productivity, reduce wasted space, reduce the risk of repetitive strain injury, run your plant 24/7, and improve profits
-
DIY’s

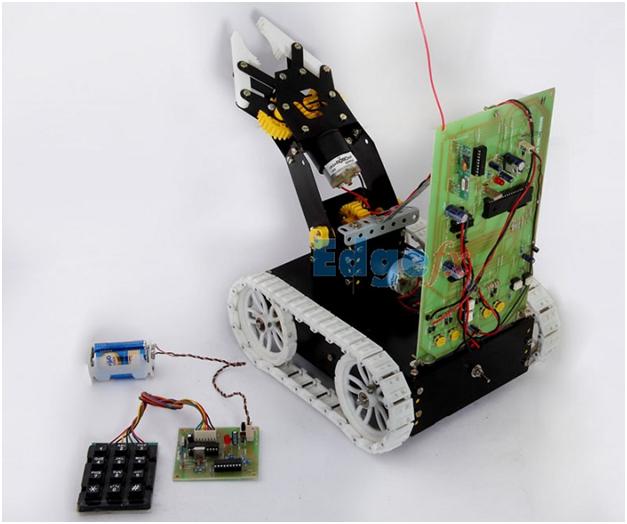
The pick and place robot actually consists of:
• A Rover: It is the main body of the robot consisting of several rigid bodies like a cylinder or a sphere, joints and links. It is also known as a manipulator.
• End Effector: It is the body connected to the last joint of the rover which is used for the purpose of gripping or handling objects. It can be an analogy to the arm of a human being.
• Actuators: They are the drivers of the robot. It actually actuates the robot. It can be any motor like servo motor, stepper motor or pneumatic or hydraulic cylinders.
• Sensors: They are used to sense the internal as well as the external state to make sure the robot functions smoothly as a whole. Sensors involve touch sensors, IR sensor etc.
• Controller: It is used to control the actuators based on the sensor feedback and thus control the motion of each and every joint and eventually the movement of the end effector
- Table: Information Collected by various Sources


PICK AND PLACE MECHANISM:
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot.
STUD MECHANISM: Stud working concept has been used here for pick and place robot at one end of stud DC motor has been engaged and at another end movement of longitudinal beam/opening and closing of gripper had been attached.
GRIPPER MECHANISM:
1.Mechanical to finger gripper : Two finger gripper had to be imported, hence made a compact gripper. From small double acting cylinder having one fixed jaw and other movable.
MECHANISM OF DEGREES OF FREEDOM:
A degree of freedom is joint on the arm, a place where it can bend or rotate or translate. We can typically identify the number of DOF by the number of actuators on the robot arm.
Linkage mechanism (www.youtube.com/watch?v=AEXYQhxnQEM):-
-
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effectors and it is analogous to the human hand.
-
A degree of freedom is a joint on the arm, a place where it can bend or rotate or translate. We can typically identify the number of degrees of freedom by the number of actuators on the robot arm(in case of serial arms). So for simplicity it is treated as separate sub-system in basic robot arm design
-
Direct Solutions for Need Statement 1.RoboticArm
-
Collaborative
3.Gripper
-
Gear DC motor
-
Lead screw
6.Ball Bearings
7.Microcontroller
8.Sensors
9.Connecting Wires
10.Driver IC
- Observations in Local Market and Industries


- Cost Estimation
1.Gripper(1)-Rs1400
2.Gear DC motor(4)-Rs1120
3.lead screw (1)-Rs1500
4.Ball bearing(2)-Rs60
5.Relay kit(1)-Rs540
6.PIC IC(1)-Rs140
7.PIC control board(1)Rs-250
8.Transformer(2)-Rs150
9.connecting wires(required)-Rs100
10.IR sensor(6) -Rs420
11.Frame& mild steel(required)-Rs700
12.Driver IC(1)-Rs300
13.Gears(required)-Rs800
14.cardboard(required)-Rs150
The cost of the pick and place robot becomes around Rs 8000, as per the information collected by us.
References:
Journal:
-
International Journal of scientific and technology Research volume 5, issue 06, June 2016
-
International Journal of Robotics and Automation (IJRA), volume 2.
-
Project on – Pick and Place Robot made by Prof. KaviArya, IIT Mumbai, 2010
https://arxiv.org/ftp/arxiv/papers/1203/1203.4475.pdf
Books:
-
Automation and mobile Pick and Place robot system for small scale food industry by Mir Sajjad Hussain
-
Pick and Place Robot by Mohammed Ahmed Sabri
Webpage:
{kind=link}
{kind=link}
{kind=link}
11)https://www.slideshare.net/svsanthoshkumar/pick-and-place-robot-ppt
12)https://www.granta-automation.co.uk/news/what-are-the-different-types-of-pick-and-placerobots/
13)https://www.skyfilabs.com/project-ideas/pick-and-place-robot-vehicle
14)www.robot-welding.com
16)www.essay.utwente.nl
17)www.roboticturnkeysolutions.com
18)www.hsglaser.com