LC 0489 [H] Robot Room Cleaner - ALawliet/algorithms GitHub Wiki
move forward: move; orientation x (^)
move right: turnRight, move; orientation (x + 1) % 4 (>)
move backward: turnRight, turnRight, move; orientation (x + 2) % 4 (v)
move left: turnRight, turnRight, turnRight, move; orientation (x + 3) % 4 (<)
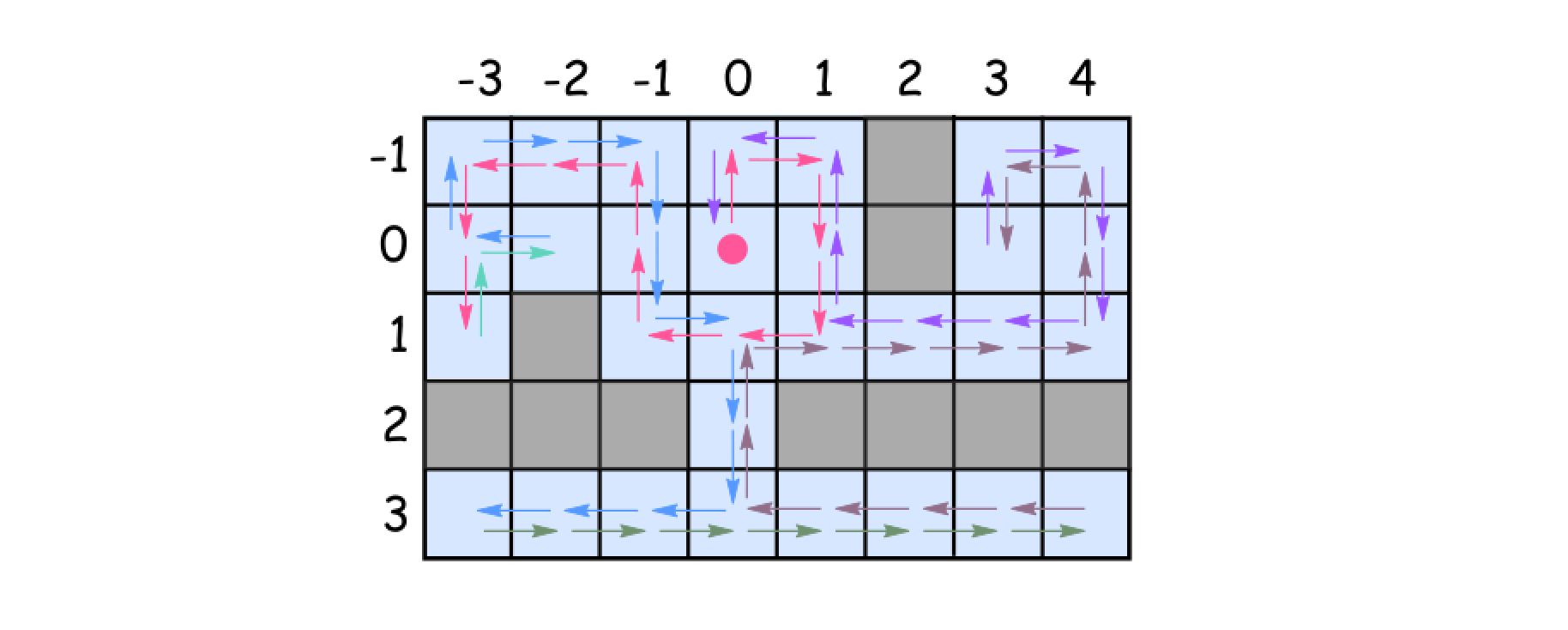
this new_d = (d + i) % 4 is required because it is not a regular DFS, it is a DFS that uses right-hand rule so we always turn to the next right/clockwise, the order is important
# going clockwise : 0: 'up', 1: 'right', 2: 'down', 3: 'left'
DIRS = [(-1, 0), (0, 1), (1, 0), (0, -1)]
class Solution(object):
def cleanRoom(self, robot):
"""
:type robot: Robot
:rtype: None
"""
def go_back():
robot.turnRight() ; robot.turnRight() ; robot.move() # reset position
robot.turnRight() ; robot.turnRight() # reset direction
def backtrack(rc, d):
visited.add(rc)
robot.clean()
for i in range(4):
nd = (d + i) % 4
nrc = (rc[0] + DIRS[nd][0], rc[1] + DIRS[nd][1])
if nrc not in visited and robot.move():
backtrack(nrc, nd)
go_back()
# could not move() by this point: there is an obstacle right in front - turn the robot following chosen direction : clockwise
robot.turnRight()
visited = set()
backtrack((0,0), 0)
# """
# This is the robot's control interface.
# You should not implement it, or speculate about its implementation
# """
#class Robot:
# def move(self):
# """
# Returns true if the cell in front is open and robot moves into the cell.
# Returns false if the cell in front is blocked and robot stays in the current cell.
# :rtype bool
# """
#
# def turnLeft(self):
# """
# Robot will stay in the same cell after calling turnLeft/turnRight.
# Each turn will be 90 degrees.
# :rtype void
# """
#
# def turnRight(self):
# """
# Robot will stay in the same cell after calling turnLeft/turnRight.
# Each turn will be 90 degrees.
# :rtype void
# """
#
# def clean(self):
# """
# Clean the current cell.
# :rtype void
# """
class Solution:
def cleanRoom(self, robot):
def goBack():
robot.turnLeft(); robot.turnLeft()
robot.move() # previous position
robot.turnLeft(); robot.turnLeft() # previous direction
def dfs(x, y, dx, dy):
# 1, Clean current
path.add((x, y))
robot.clean()
# 2, Clean next
for _ in range(4):
if (x + dx, y + dy) not in path and robot.move():
dfs(x + dx, y + dy, dx, dy)
robot.turnLeft()
dx, dy = -dy, dx
# 0,1 => -1,0
# -1,0 => 1,0
# 1,0 => 0,1
# 0,1 => 0,-1
# 3, Back to previous position and direction
goBack()
path = set()
dfs(0, 0, 0, 1)